一种车载高精度的时间同步实现方法及系统与流程
本发明涉及车载adas领域,更具体地,涉及一种车载高精度的时间同步实现方法及系统。
背景技术:
1、在当前网联化、智能化的背景下,汽车越来越智能,在非常多的场合下,能够释提高汽车的安全性,通过检测车辆周边的环境,提前对一些危险的行为进行规避。为了达到这种效果,汽车上加入了非常多的传感器,包括摄像头、雷达等,为汽车增加感知,让汽车能够实时观察车周边环境的变化,根据这些变化进行合理的控制汽车。比如高速上通过中距离摄像头和激光雷达检测车道线、周边的障碍物、远距离的障碍物等信息,提前对车辆进行变道、刹车等处理,从而避免灾难的发生。
2、比较典型的安全系统就是adas系统,其中就用到摄像头、雷达等传感器。雷达、摄像头(独立的处理器)分别将采集到的数据发送给控制模块,控制模块根据这些数据进行融合、分析,从而最终给车辆进行最合适的控制。但由于汽车是一个运动的物体,周边环境瞬息万变,当雷达上报的信息与摄像头上报的信息时间不一致,这样就会导致控制模块做出错误的判断。
3、为了解决这个时间不同步的问题,车载系统中比较常用的是通过can进行时间同步。
4、原理是:一个时间精度比较高的ecu(master)通过can报文周期发送2帧报文到can总线上,被同步ecu(slave)通过这2帧报文的内容进行时间同步。
5、目前方案将can传输时间忽略不计,而实际情况can报文从master的时间模块发出到slave接收到中间存在比较多的因素,包括master内部can数据的传输时间、can总线的总裁时间、can数据在硬件上的传输时间等,从而导致同步的时间存在意想不到的偏差。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供一种车载高精度的时间同步实现方法及系统。
2、根据本发明的第一方面,提供了一种车载高精度的时间同步实现方法,包括:
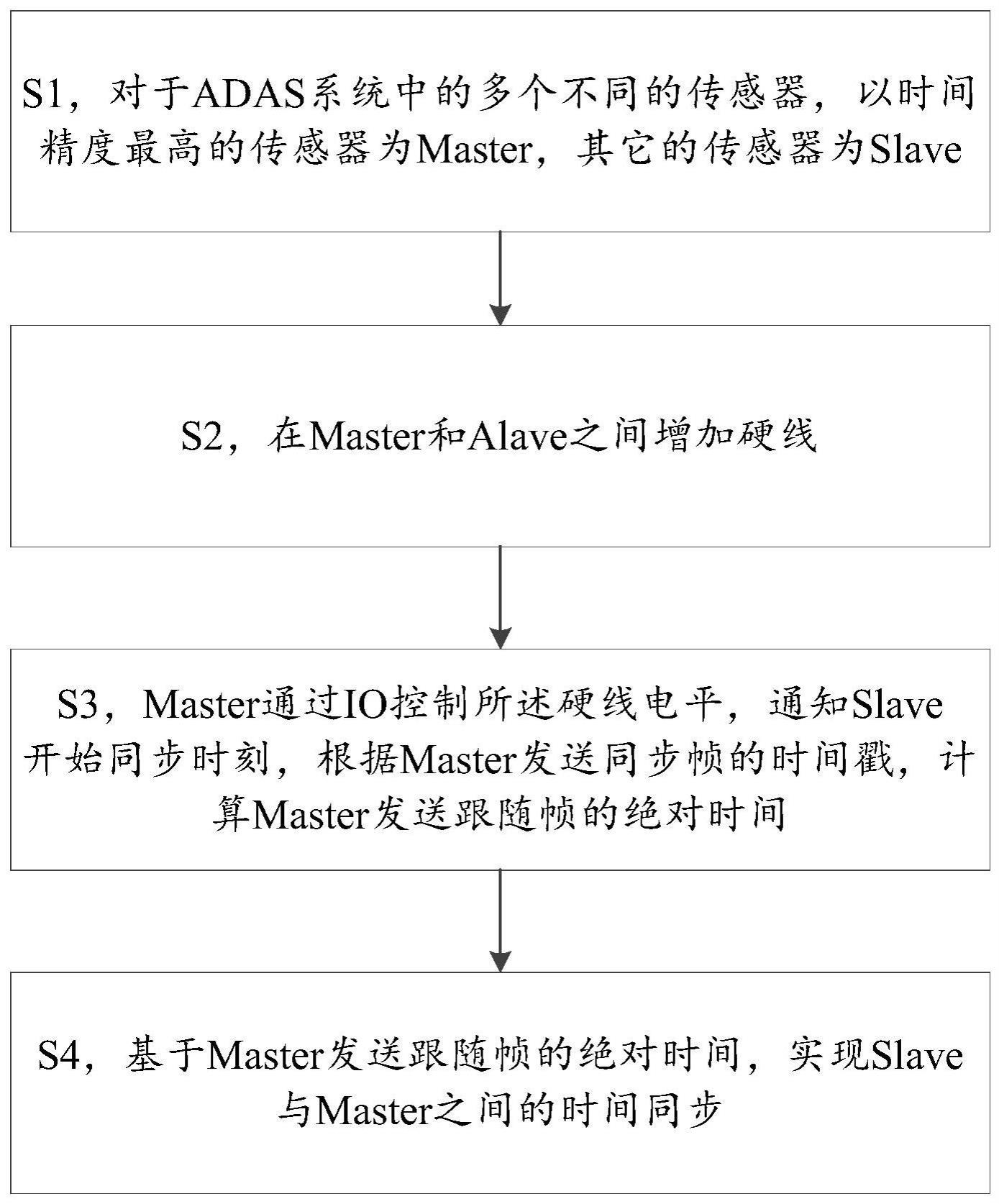
3、对于adas系统中的多个不同的传感器,以时间精度最高的传感器为master,其它的传感器为slave;
4、在master和slave之间增加硬线;
5、master通过io控制所述硬线电平,通知slave开始同步时刻,根据master发送同步帧的时间戳,计算master发送跟随帧的绝对时间;
6、基于master发送跟随帧的绝对时间,实现slave与master之间的时间同步。
7、在上述技术方案的基础上,本发明还可以作出如下改进。
8、可选的,所述master通过io控制所述硬线电平,通知slave开始同步时刻,根据master发送同步帧的时间戳,计算master发送跟随帧的绝对时间,包括:
9、master以预定周期发送同步帧,在t1时刻发送t0时刻的时间戳,并发送第一次硬线io电平;
10、slave接收到第一次硬线io电平时,通过中断在t2时刻接收到同步电平并记录t2时间戳;
11、slave在t3时刻接收到同步帧后,解析t0时间戳;
12、master间隔固定时间后发送跟随帧,所述跟随帧中包括can报文同步帧在发送时的传输时间△t0,发送第二次硬线io电平;
13、salve接收到第二次硬线io电平时,通过中断在t4’时刻接收到同步电平并记录t4’时间戳;
14、slave在t4时刻接收到跟随帧后,计算master发送跟随帧的绝对时间。
15、可选的,所述第一次硬线io电平和所述第二次硬线电平,其中一个为高电平,另一个为低电平。
16、可选的,所述slave在t4时刻接收到跟随帧后,计算master发送跟随帧的绝对时间,包括:
17、master发送跟随帧的绝对时间=t0+△t0+t4’-t2。
18、可选的,所述基于master发送跟随帧的绝对时间,实现slave与master之间的时间同步,包括:
19、以master发送跟随帧的绝对时间为基准,调整slave的系统时间。
20、根据本发明的第二方面,提供一种车载高精度的时间同步实现系统,包括:
21、包括master和slave,其中,对于adas系统中的多个不同的传感器,以时间精度最高的传感器为master,其它的传感器为slave,在master和slave之间增加硬线;
22、master,用于通过io控制所述硬线电平,通知slave开始同步时刻;
23、slave,用于根据master发送同步帧的时间戳,计算master发送跟随帧的绝对时间;以及基于master发送跟随帧的绝对时间,实现slave与master之间的时间同步。
24、可选的,所述master以预定周期发送同步帧,在t1时刻发送t0时刻的时间戳,并发送第一次硬线io电平;
25、slave接收到第一次硬线io电平时,通过中断在t2时刻接收到同步电平并记录t2时间戳;
26、slave在t3时刻接收到同步帧后,解析t0时间戳;
27、master间隔固定时间后发送跟随帧,所述跟随帧中包括can报文同步帧在发送时的传输时间△t0,发送第二次硬线io电平;
28、salve接收到第二次硬线io电平时,通过中断在t4’时刻接收到同步电平并记录t4’时间戳;
29、slave在t4时刻接收到跟随帧后,计算master发送跟随帧的绝对时间。
30、可选的,所述基于master发送跟随帧的绝对时间,实现slave与master之间的时间同步,包括:
31、以master发送跟随帧的绝对时间为基准,调整slave的系统时间。
32、根据本发明的第三方面,提供了一种电子设备,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机管理类程序时实现车载高精度的时间同步实现方法的步骤。
33、根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现车载高精度的时间同步实现方法的步骤。
34、本发明提供的一种车载高精度的时间同步实现方法及系统,在时间不同步的传感器之间增加硬线,master通过io控制电平的高低,通知slave开始同步时刻,相比传统技术中通过can进行时间同步的方法,同步的精度更高。
技术特征:
1.一种车载高精度的时间同步实现方法,其特征在于,包括:
2.根据权利要求1所述的时间同步方法,其特征在于,所述master通过io控制所述硬线电平,通知slave开始同步时刻,根据master发送同步帧的时间戳,计算master发送跟随帧的绝对时间,包括:
3.根据权利要求2所述的时间同步方法,其特征在于,所述第一次硬线io电平和所述第二次硬线电平,其中一个为高电平,另一个为低电平。
4.根据权利要求3所述的时间同步方法,其特征在于,所述slave在t4时刻接收到跟随帧后,计算master发送跟随帧的绝对时间,包括:
5.根据权利要求1所述的时间同步方法,其特征在于,所述基于master发送跟随帧的绝对时间,实现slave与master之间的时间同步,包括:
6.一种车载高精度的时间同步实现系统,其特征在于,包括master和slave,其中,对于adas系统中的多个不同的传感器,以时间精度最高的传感器为master,其它的传感器为slave,在master和slave之间增加硬线;
7.根据权利要求6所述的时间同步系统,其特征在于,所述master以预定周期发送同步帧,在t1时刻发送t0时刻的时间戳,并发送第一次硬线io电平;
8.根据权利要求7所述的时间同步系统,其特征在于,所述基于master发送跟随帧的绝对时间,实现slave与master之间的时间同步,包括:
9.一种电子设备,其特征在于,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机管理类程序时实现如权利要求1-5任一项所述的车载高精度的时间同步实现方法的步骤。
10.一种计算机可读存储介质,其特征在于,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现如权利要求1-5任一项所述的车载高精度的时间同步实现方法的步骤。
技术总结
本发明提供一种车载高精度的时间同步实现方法及系统,方法包括:对于ADAS系统中的多个不同的传感器,以时间精度最高的传感器为Master,其它的传感器为Slave;在Master和Slave之间增加硬线;Master通过IO控制所述硬线电平,通知Slave开始同步时刻,根据Master发送同步帧的时间戳,计算Master发送跟随帧的绝对时间;基于Master发送跟随帧的绝对时间,实现Slave与Master之间的时间同步。本发明在时间不同步的传感器之间增加硬线,Master通过IO控制电平的高低,通知Slave开始同步时刻,相比传统技术中通过CAN进行时间同步的方法,同步的精度更高。
技术研发人员:张龙,胡健,郑乐新,罗威
受保护的技术使用者:武汉光庭信息技术股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!