基于空地立体覆盖的通信与飞行控制一体化装置及方法
本发明属于空中基站通信领域,特别涉及一种通信与飞行控制一体化方法及装置,可用于空中基站辅助通信中,实现空中基站按需的信号和容量覆盖。
背景技术:
1、随着无线通信技术的发展,传统的移动设备间的通信主要是通过预先架设好的地面基站实现的。这种基站的缺点有:1)地面基站部署高度较低,基站与移动终端之间存在大量遮挡,这会极大地降低通信质量;2)由于无法快速部署和受限于地形等客观条件,在突发事件、应急救灾等需要通信支援时,显得无能为力。相较于传统的地面基站,空中基站优势明显:1)空中基站可以利用高度优势和地面移动设备建立视线信道,提高了通信的质量和可靠性;2)空中基站机动灵活几乎不受地形影响,可以在突发事件、应急救灾和偏远地区通信支援等情况下,快速部署到指定位置为地面移动设备提供服务;因此空中基站作为重要的移动网络覆盖补充手段,发挥着越来越重要的作用。
2、现有空中基站实现方案中,通信覆盖能力和飞行控制能力处于分离的状态,一般通过预先设计空中基站飞行轨迹或悬停位置,为地面提供覆盖能力。若地面用户分布和业务需求发生变化,则需重新规划飞行轨迹和悬停位置,以达到较优的通信覆盖的目的。
3、北京邮电大学在其申请号为cn202011316826.0的专利申请文献公开了“一种空中基站位置确定方法、装置及电子设备”,在申请号为cn202011488574.x的专利申请文献中公开了“一种空中基站位置确定方法及装置”,其分别提出了一种根据基站空口或终端信息,确定当前空中基站位置,但这两项专利中,均只提及了空中基站位置确定的方式,并未涉及到一体化控制无人机的相关内容。无法根据实际的用户分布和业务分布自适应调整网络覆盖。
4、中国科学院自动化研究所在申请号为cn202210776834.6的专利申请文献中,公开了一种“无人机空中基站部署方法、装置及电子设备”,其目的在于以最少的空中基站部署数量,达到较好的覆盖效果的方法。但该方法只由于只是停留在静态部署的层面,无法实现自适应空中基站部署。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,提出一种基于空地立体覆盖的通信与飞行控制一体化装置及方法,以解决空中基站网络覆盖无法根据用户分布和业务分布情况自适应调整的问题,提升覆盖的时效性,实现按需的信号和容量覆盖。
2、为实现上述目的,本发明的技术方案是这样实现的:
3、1.基于空地立体覆盖的通信与飞行控制一体化装置,包括无人机、飞行控制器和机载基站三部分,飞行控制器分别通过以太网口与机载基站连接,通过串口或以太网口与无人机连接,其特征在于:飞行控制器包括:
4、初始化模块:用于实现初始资源分配和各个子模块初始化;
5、通信模块:用于实现与机载基站、无人机之间的通信链路建立、维持和通信;
6、设备管理模块:用于实现配置管理和状态监视;
7、告警模块:用于实现软硬件告警信息的采集、展示和解除功能;
8、日志管理模块:用于实现日志的记录、存储、导出和展示;
9、数据缓存模块:用于实现对来自机载基站和无人机的数据缓存;
10、飞控算法模块:用于实现基于机载基站信息的飞行控制。
11、2.一种基于空地立体覆盖的通信与飞行控制一体化方法,其特征在于,包括如下步骤:
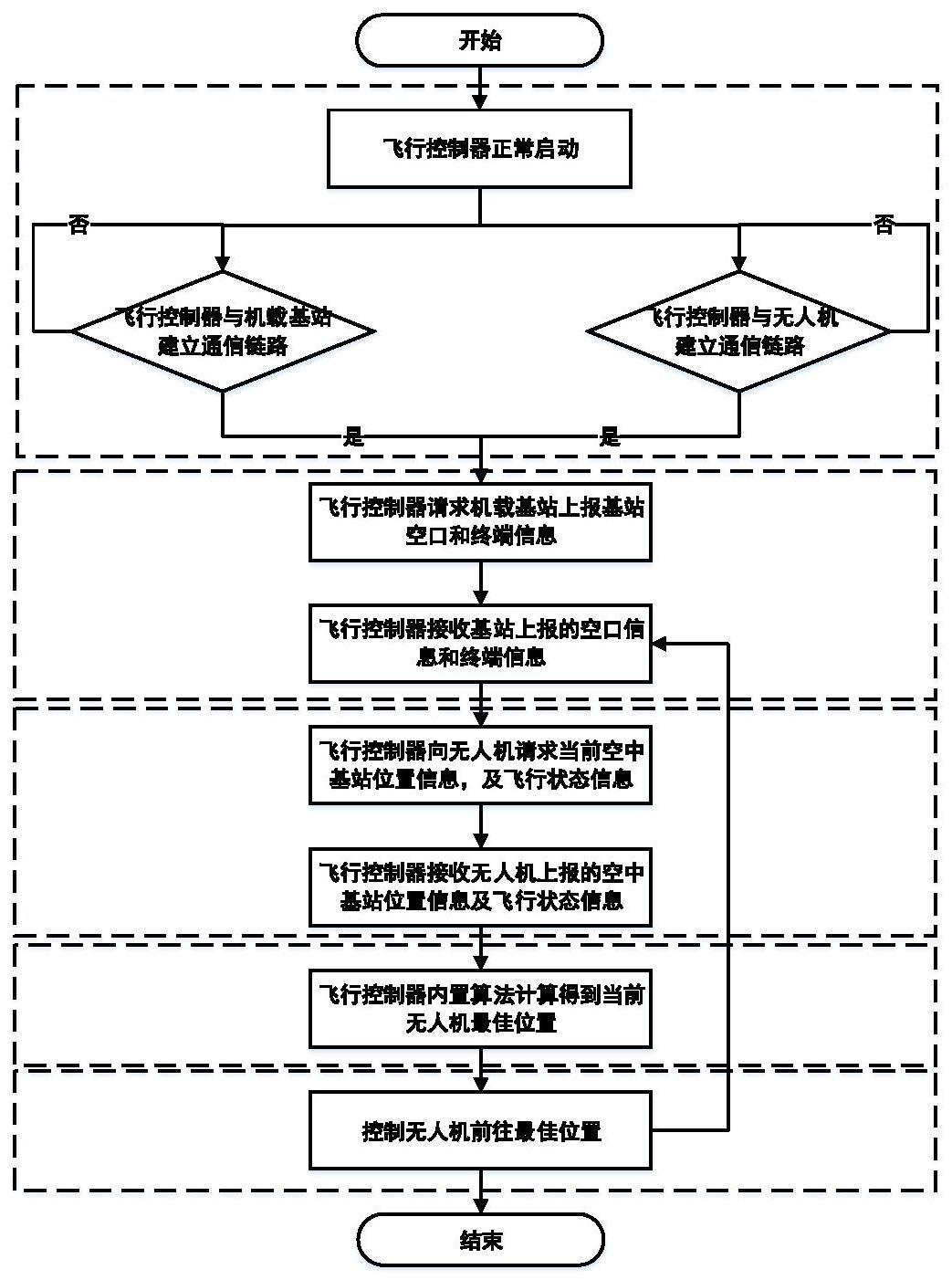
12、1)飞行控制器正常启动;
13、2)飞行控制器与机载基站之间建立通信链路,若通信链路建立失败,则重新执行该步骤,直至通信链路建立,并保持当前链路;
14、3)飞行控制器与无人机之间建立通信链路,若通信链路建立失败,则重新执行
15、该步骤,直至通信链路建立,并保持当前链路;
16、4)飞行控制器根据其飞控算法模块的需求向机载基站请求该算法模块所需的基站信息及用户终端信息;
17、5)飞行控制器接收机载基站一次或多次上报的基站信息及用户终端信息,并缓存该部分信息;
18、6)飞行控制器向无人机请求当前空中基站飞行状态信息和位置信息,即无人机的飞行状态及经度、纬度和高度信息;
19、7)飞行控制器接收到无人机上报的空中基站位置信息和飞行状态信息后,结合基站上报的机载基站信息和用户终端信息,计算得到无人机最佳飞行轨迹或悬停位置;
20、8)根据计算得到的最佳飞行轨迹信息或悬停位置信息,飞行控制器对无人机飞行的轨迹或悬停位置进行调整;
21、9)重复步骤4)~步骤8)直至当前任务结束。
22、本发明与现有技术相比,具有如下优点:
23、第一,本发明由于在现有空中基站结构组成中新增设有不同功能模块的飞行控制器,通过该飞行控制器,实现了空中基站飞行控制和通信覆盖的有机联动,使得飞行控制实时的服务于通信覆盖,提升了通信覆盖的时效性。
24、第二,本发明提供的空中基站在执行网络覆盖任务时的自适应位置调整的方法,即在空中基站执行任务时,飞行控制器接收来自机载基站的基站信息、用户终端信息以及来自无人机的位置信息和飞行状态信息,通过飞行控制器的飞控算法模块,计算得到针对当前情形的空中基站的最佳飞行轨迹或位置信息,并通过飞行控制器与无人机之间的通信链路,实现了空中基站飞行轨迹或位置的自适应调整,以达到按需的信号和容量覆盖。
技术特征:
1.一种基于空地立体覆盖的通信与飞行控制一体化装置,包括无人机、飞行控制器和机载基站三部分,飞行控制器分别通过以太网口与机载基站连接,通过串口或以太网口与无人机连接,其特征在于:飞行控制器包括:
2.根据权利要求1所属的装置,其特征在于,通信模块(2)与机载基站之间的通信链路建立、维持和通信,其使用的数据结构包括:消息头字段、消息单元头字段、子消息单元头字段和数据字段;
3.根据权利要求1所属的装置,其特征在于,通信模块(2)与无人机之间的通信链路建立、维持和通信,其使用的数据结构包括:关键字字段、消息头字段、消息内容字段和校验和字段;
4.根据权利要求1所述的装置,其特征在于,飞控算法模块(7)包括:
5.一种基于空地立体覆盖的通信与飞行控制一体化方法,其特征在于,包括如下步骤:
6.根据权利要求5所述的方法,其特征在于,步骤2)飞行控制器与机载基站之间建立通信链路,是空中基站运行时,飞行控制器与机载基站之间采用固定端口,建立tcp通信链路,该链路建立后,由飞行控制器周期性的向机载基站发送心跳消息,机载基站在接收到心跳消息后,向飞行控制器回复心跳响应消息,用以维持当前链路。
7.根据权利要求5所述的方法,其特征在于,步骤3)中飞行控制器与无人机之间建立通信链路,是根据无人机提供的通信接口进行不同的链接:
8.根据权利要求5所述的方法,其特征在于,步骤8)中飞行控制器对无人机飞行的轨迹或悬停位置进行调整,是将计算所得的最佳飞行轨迹和悬停位置,与当前无人机的飞行轨迹或悬停位置进行比较:
技术总结
本发明公开了一种基于空地立体覆盖的通信与飞行控制一体化装置及方法,主要解决现有基站网络覆盖与飞行控制相分离造成的空中基站无法根据网络覆盖自适应调整位置的问题。其包括无人机、飞行控制器和机载基站,通过对飞行控制器模块及通信使用的数据结构设计,进行无人机与机载基站的有机联动:飞行控制器启动并建立通信链路;飞行控制器分别获取基站侧信息和无人机侧信息,根据获取信息执行飞行控制算法;根据算法输出控制空中基站飞行。本发明能根据基站资源分配、用户终端分布和用户业务变化这些不同情况实时的调整飞行轨迹或悬停位置,提高空中基站对于网络覆盖的自适应调整能力,实现空中基站按需的通信和容量覆盖,可用于空中基站辅助通信。
技术研发人员:何华龙,史琰,盛敏,刘俊宇,李建东
受保护的技术使用者:西安电子科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!