一种基于机器人的巡逻方法、装置、电子设备及存储介质与流程
本申请涉及机器人,尤其涉及一种基于机器人的巡逻方法、装置、电子设备及存储介质。
背景技术:
1、现如今我们对于自身安全是越来越重视,各种各样的监控设备在我们身边工作着。通过这些监控设备,能够实时生成视频图像,这种图像的直观性能够在交通、治安等方面所起到的巨大作用。
2、一般常见的监控设备就是监控摄像头,其具有视频摄像/传播和静态图像捕捉等基本功能。监控摄像头是借由镜头采集图像后,由摄像头内的感光组件电路及控制组件对图像进行处理并转换成电脑所能识别的数字信号,然后借由并行端口或usb连接输入到电脑后由软件再进行图像还原。
3、但由于监控摄像头本身结构和安装位置的限定,使得其在安装使用后存在安防死角区域,无法实现对所监控的区域全覆盖,因此无法更好的保障人员和财物的安全。
技术实现思路
1、有鉴于此,本申请实施例提供了一种基于机器人的巡逻方法、装置、电子设备及存储介质,以解决现有技术中由于监控摄像头存在安防死角区域,无法实现对所监控的区域全覆盖的问题。
2、本申请实施例的第一方面,提供了一种基于机器人的巡逻方法,该方法应用于巡逻机器人的控制系统;包括:
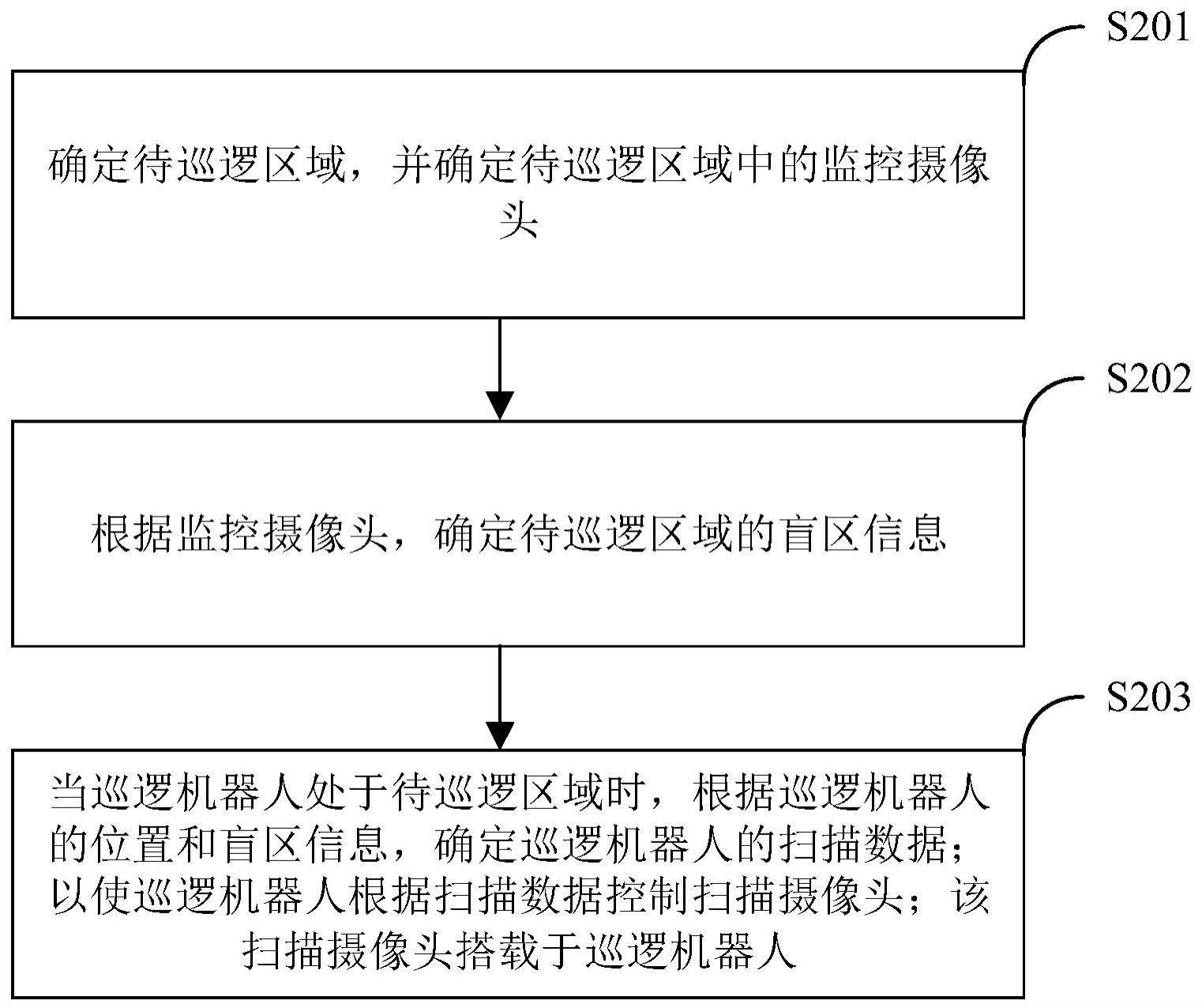
3、确定待巡逻区域,并确定待巡逻区域中的监控摄像头;
4、根据监控摄像头,确定待巡逻区域的盲区信息;
5、当巡逻机器人处于待巡逻区域时,根据巡逻机器人的位置和盲区信息,确定巡逻机器人的扫描数据;以使巡逻机器人根据扫描数据控制扫描摄像头;
6、扫描摄像头搭载于巡逻机器人。
7、本申请实施例的第二方面,提供了一种基于机器人的巡逻装置,包括:
8、待巡逻区域确定模块:用于确定待巡逻区域,并确定待巡逻区域中的监控摄像头;
9、盲区信息确定模块:用于根据监控摄像头,确定待巡逻区域的盲区信息;
10、扫描数据确定模块:用于当巡逻机器人处于待巡逻区域时,根据巡逻机器人的位置和盲区信息,确定巡逻机器人的扫描数据;以使巡逻机器人根据扫描数据控制扫描摄像头;扫描摄像头搭载于巡逻机器人。
11、本申请实施例的第三方面,提供了一种电子设备,包括存储器、处理器以及存储在存储器中并且可在处理器上运行的计算机程序,该处理器执行计算机程序时实现上述方法的步骤。
12、本申请实施例的第四方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现上述方法的步骤。
13、本申请实施例与现有技术相比存在的有益效果是:通过根据监控摄像头,确定待巡逻区域的盲区信息,然后使用巡逻机器人弥补监控摄像头的盲区也就是安防死角区域,通过二者的互相配合,实现待巡逻区域的全覆盖监控,保障了待巡逻区域内人员和财物的安全。
技术特征:
1.一种基于机器人的巡逻方法,其特征在于,所述方法应用于巡逻机器人的控制系统;所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述待巡逻区域中的监控摄像头包括,固定摄像头;所述根据所述监控摄像头,确定所述待巡逻区域的盲区信息包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述巡逻机器人的位置和所述盲区信息,确定所述巡逻机器人的扫描数据包括:
4.根据权利要求1所述的方法,其特征在于,所述待巡逻区域中的监控摄像头包括,移动摄像头;根据所述监控摄像头,确定所述待巡逻区域的盲区信息包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述巡逻机器人的位置和所述盲区信息,确定所述巡逻机器人的扫描数据包括:
6.根据权利要求5所述的方法,其特征在于,所述巡逻机器人根据所述扫描数据控制扫描摄像头包括:
7.根据权利要求1至6中任一项所述的方法,其特征在于,还包括:
8.一种基于机器人的巡逻装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器以及存储在所述存储器中并且可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述方法的步骤。
技术总结
本申请涉及机器人技术领域,提供了一种基于机器人的巡逻方法、装置、电子设备及存储介质。该方法应用于巡逻机器人的控制系统,包括:确定待巡逻区域,并确定待巡逻区域中的监控摄像头;根据监控摄像头,确定待巡逻区域的盲区信息;当巡逻机器人处于待巡逻区域时,根据巡逻机器人的位置和盲区信息,确定巡逻机器人的扫描数据;以使巡逻机器人根据扫描数据控制扫描摄像头;扫描摄像头搭载于巡逻机器人。本申请通过根据监控摄像头,确定待巡逻区域的盲区信息,然后使用巡逻机器人弥补监控摄像头的盲区也就是安防死角区域,通过二者的互相配合,实现待巡逻区域的全覆盖监控,保障了待巡逻区域内人员和财物的安全。
技术研发人员:杨世允,周天月,支涛
受保护的技术使用者:河南云迹智能技术有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!