面向无人机用户下行链路传输的空地基站协作方法
本发明属于无线通信,尤其涉及面向无人机用户下行链路传输的空地基站协作方法。
背景技术:
1、随着无人机技术和无线通信技术的蓬勃发展,无人机与传统蜂窝网络的逐步融合逐渐催生了各种各样的民事和军事应用,这引起了工业界和学术界对无人机蜂窝网络的高度关注。在无人机蜂窝网络中,无人机不仅可以作为空中基站为地面用户或无人机用户提供上下行链路传输,以减轻地面蜂窝基站的传输负担,提高网络的整体传输性能;还可以作为空中用户执行各种空中任务,如地质勘探、森林防火、林业植保等。无人机蜂窝网络与传统蜂窝网络相比,是一种具有强干扰特征的网络。在无人机蜂窝网络中,无人机用户可能会接收到来自附近地面蜂窝基站或空中基站的更加严重的视距干扰,这些严重的小区间干扰已成为制约无人机蜂窝网络中无人机用户下行链路传输性能的主要因素。
2、为了解决这一问题,可以引入基站协作来减轻小区间干扰,为无人机用户提供可靠的下行链路传输。然而,目前相关研究大多只考虑了地面基站之间的协作传输方法,这对于无人机蜂窝网络来说可能不是有效的。这是因为在无人机蜂窝网络中,无人机用户通常在比较高的空中飞行。无人机用户与地面基站之间的距离对地面基站的协作传输增益有很大的影响,这进一步会影响到无人机用户的下行链路传输性能。
技术实现思路
1、本发明目的在于提供一种面向无人机用户下行链路传输的空地基站协作方法,将空中基站引入到基站协作中用于缓解无人机蜂窝网络中无人机用户面临严重小区间干扰的情况,提高无人机用户的下行链路传输性能。
2、为解决上述技术问题,本发明的具体技术方案如下:
3、一种面向无人机用户下行链路传输的空地基站协作方法,包括如下步骤:
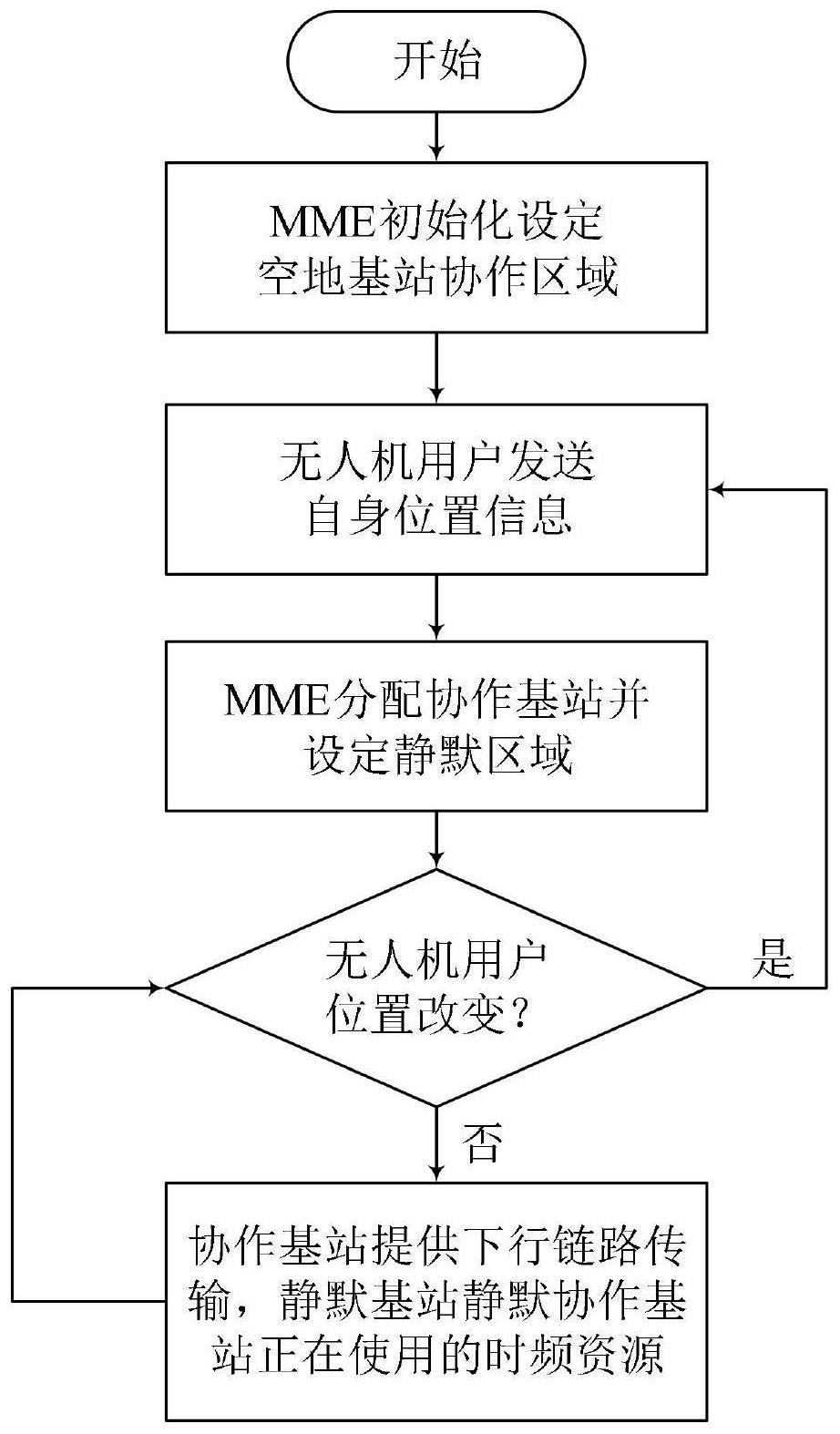
4、步骤1、核心网移动性管理实体(mobility management entity,mme)初始化设定空地基站协作区域;
5、步骤2、无人机用户在执行任务期间周期性地向核心网移动性管理实体mme发送自身位置信息ua;
6、步骤3、核心网移动性管理实体mme根据无人机用户的位置信息,为无人机分配协作空中基站和协作地面基站,并设定一个地面静默区域;
7、步骤4、协作空中基站和协作地面基站协同为无人机用户提供下行链路传输,处于地面静默区域的地面基站静默协作基站正在使用的时频资源。
8、进一步的,步骤1中,核心网mme初始化设定空地基站协作区域,其步骤具体包括:
9、步骤1.1、每个地面基站向核心网移动性管理实体mme发送自身位置信息xi;
10、步骤1.2、每个空中基站周期性地向核心网移动性管理实体mme发送自身位置信息yj,且一旦位置发生变化,则立刻向核心网移动性管理实体mme更新自身位置信息;
11、步骤1.3、核心网移动性管理实体mme根据每个地面基站的地面位置{xi},i=1,2,…,确定每个地面基站的平面覆盖区域ci,i=1,2,…;
12、步骤1.4、核心移动性管理实体网mme根据每个空中基站的空中位置{yj},j=1,2,…,确定每个空中基站的平面覆盖区域cj,j=1,2,…;
13、步骤1.5、若一个地面基站xi的覆盖区域和一个空中基站yj的覆盖区域在地面上的投影存在重叠区域,则定义该重叠区域是这两个基站的协作传输区域,即:cij={z∈r2,z∈ci∪cj},i,j=1,2,…;
14、步骤1.6、核心网mme根据协作传输区域的定义获得并定期维护一个空地基站协作传输区域的平面分布图{cij},i,j=1,2,…。
15、进一步的,步骤1.3中,核心网移动性管理实体mme根据每个地面基站的地面位置,确定每个地面基站的平面覆盖区域,即以相邻地面基站之间连线的垂直平分线为两个地面基站各自覆盖区域之间的边界,得到每一个地面基站的多边形覆盖区域,即:ci,i=1,2,…。
16、进一步的,步骤1.4中,核心网移动性管理实体mme根据每个空中基站的空中位置,确定每个空中基站的平面覆盖区域,即以相邻空中基站在地面投影点之间连线的垂直平分线为两个空中基站各自覆盖区域之间的边界,得到每一个空中基站的多边形覆盖区域,即:cj,j=1,2,…。
17、进一步的,步骤2中,无人机用户在执行任务期间周期性地向核心网移动性管理实体mme发送自身的位置信息ua,即无人机通过携带的gps装置获得自身位置信息,并周期性地发送至核心网移动性管理实体mme。
18、进一步的,步骤3中,核心网移动性管理实体mme根据无人机用户的位置信息,为其分配协作空中基站和协作地面基站,并设定一个地面静默区域,其步骤具体包括:
19、步骤3.1、根据无人机用户的位置信息ua,得到无人机用户在地面上的投影点u′a所落入的协作传输区域及其所对应的协作空中基站yj和协作地面基站xi;
20、步骤3.2、核心网移动性管理实体mme向所确定的协作空中基站yj和协作地面基站xi发送为无人机用户ua提供下行链路协同传输的指令;
21、步骤3.3、以无人机用户在地面的投影点u′a为圆心,以无人机用户与协作地面基站xi之间的水平距离||u′a-xi||为内环半径,以一个给定宽度w为环宽,设定无人机用户的地面静默区域,即
22、
23、其中,v表示一个位于二维平面的点的坐标;r2表示一个二维实数域,于描述一个无穷大的二维平面;b(x,d)表示一个以x为圆心,d为半径的圆形区域。
24、进一步的,步骤4中,协作基站协同为无人机用户提供下行链路传输,处于地面静默区域的地面基站静默协作基站正在使用的时频资源,其步骤包括:
25、步骤4.1、协作地面基站xi和协作空中基站yj采用非相干传输的方式为无人机用户提供下行链路传输;
26、步骤4.2、核心网移动性管理实体mme将协作空中基站和协作地面基站所采用的时频资源信息发送给处于无人机用户静默区域的地面基站xk={xk∈cb};
27、步骤4.3、处于无人机用户静默区域的地面基站xk根据从核心网移动性管理实体mme接收到的协作基站时频资源信息,静默协作基站正在使用的时频资源。
28、本发明的面向无人机用户下行链路传输的空地基站协作方法,具有以下优点:
29、本发明采用了空地基站协作的技术方案,将空地基站之间的非相干传输与地面静默区域相结合,能够在尽量减少协作开销的前提下,有效提高无人机用户下行链路传输的可靠性和吞吐量,有助于解决无人机蜂窝网络中无人机用户下行链路传输面临严重干扰的问题。
技术特征:
1.一种面向无人机用户下行链路传输的空地基站协作方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的面向无人机用户下行链路传输的空地基站协作方法,其特征在于,步骤1中,核心网mme初始化设定空地基站协作区域,其步骤具体包括:
3.根据权利要求2所述的面向无人机用户下行链路传输的空地基站协作方法,其特征在于,步骤1.3中,核心网移动性管理实体mme根据每个地面基站的地面位置,确定每个地面基站的平面覆盖区域,即以相邻地面基站之间连线的垂直平分线为两个地面基站各自覆盖区域之间的边界,得到每一个地面基站的多边形覆盖区域,即:ci,i=1,2,…。
4.根据权利要求2所述的面向无人机用户下行链路传输的空地基站协作方法,其特征在于,步骤1.4中,核心网移动性管理实体mme根据每个空中基站的空中位置,确定每个空中基站的平面覆盖区域,即以相邻空中基站在地面投影点之间连线的垂直平分线为两个空中基站各自覆盖区域之间的边界,得到每一个空中基站的多边形覆盖区域,即:cj,j=1,2,…。
5.根据权利要求1所述的面向无人机用户下行链路传输的空地基站协作方法,其特征在于,步骤2中,无人机用户在执行任务期间周期性地向核心网移动性管理实体mme发送自身的位置信息ua,即无人机通过携带的gps装置获得自身位置信息,并周期性地发送至核心网移动性管理实体mme。
6.根据权利要求2所述的面向无人机用户下行链路传输的空地基站协作方法,其特征在于,步骤3中,核心网移动性管理实体mme根据无人机用户的位置信息,为其分配协作空中基站和协作地面基站,并设定一个地面静默区域,其步骤具体包括:
7.根据权利要求6所述的面向无人机用户下行链路传输的空地基站协作方法,其特征在于,步骤4中,协作基站协同为无人机用户提供下行链路传输,处于地面静默区域的地面基站静默协作基站正在使用的时频资源,其步骤包括:
技术总结
本发明公开了一种面向无人机用户下行链路传输的空地基站协作方法,该方法包括如下步骤:(1)核心网移动性管理实体(MME)初始化设定空地基站协作区域;(2)无人机用户在执行任务期间周期性地向核心网MME发送自身位置信息;(3)核心网MME根据无人机用户的位置信息,为无人机分配协作空中基站和协作地面基站,并设定一个地面静默区域;(4)协作基站协同为无人机用户提供下行链路传输,处于地面静默区域的地面基站静默协作基站正在使用的时频资源。本发明在尽量减少协作开销的前提下,能够有效提高无人机用户下行链路传输的可靠性和吞吐量。
技术研发人员:郑军,王哲
受保护的技术使用者:东南大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!