基于非线性补偿的驱动控制的方法、致动结构及存储介质与流程
本发明涉及摄像,特别是涉及一种基于非线性补偿的驱动控制的方法、致动结构及存储介质。
背景技术:
1、sma(shape memory alloys,形状记忆合金)材料由于其加热收缩的特性,具有收缩力大、体积小且耐用等优点,已渐渐应用为致动器的驱动件,例如智能电子设备中摄像头的对焦和/或防抖装置中。在电子设备中通过处理器改变sma线的驱动信号使其发生不同程度的应变收缩拉动活动件移动、使活动件带动镜头等元器件运动,最终实现镜头的移动,实现摄像头的对焦、防抖或其他运动。而sma线驱动控制闭环的方法往往需要计算出sma线的位移偏差,以根据位移偏差控制sma线的伸缩量。然而,相关技术中,sma线的位移偏差往往计算复杂,从而导致响应滞后,sma线的控制精度不高。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,提出一种基于非线性补偿的驱动控制的方法、致动结构及存储介质,可以提升位移控制的精度。
2、第一方面,本申请提供一种基于非线性补偿的驱动控制的方法,所述方法包括:
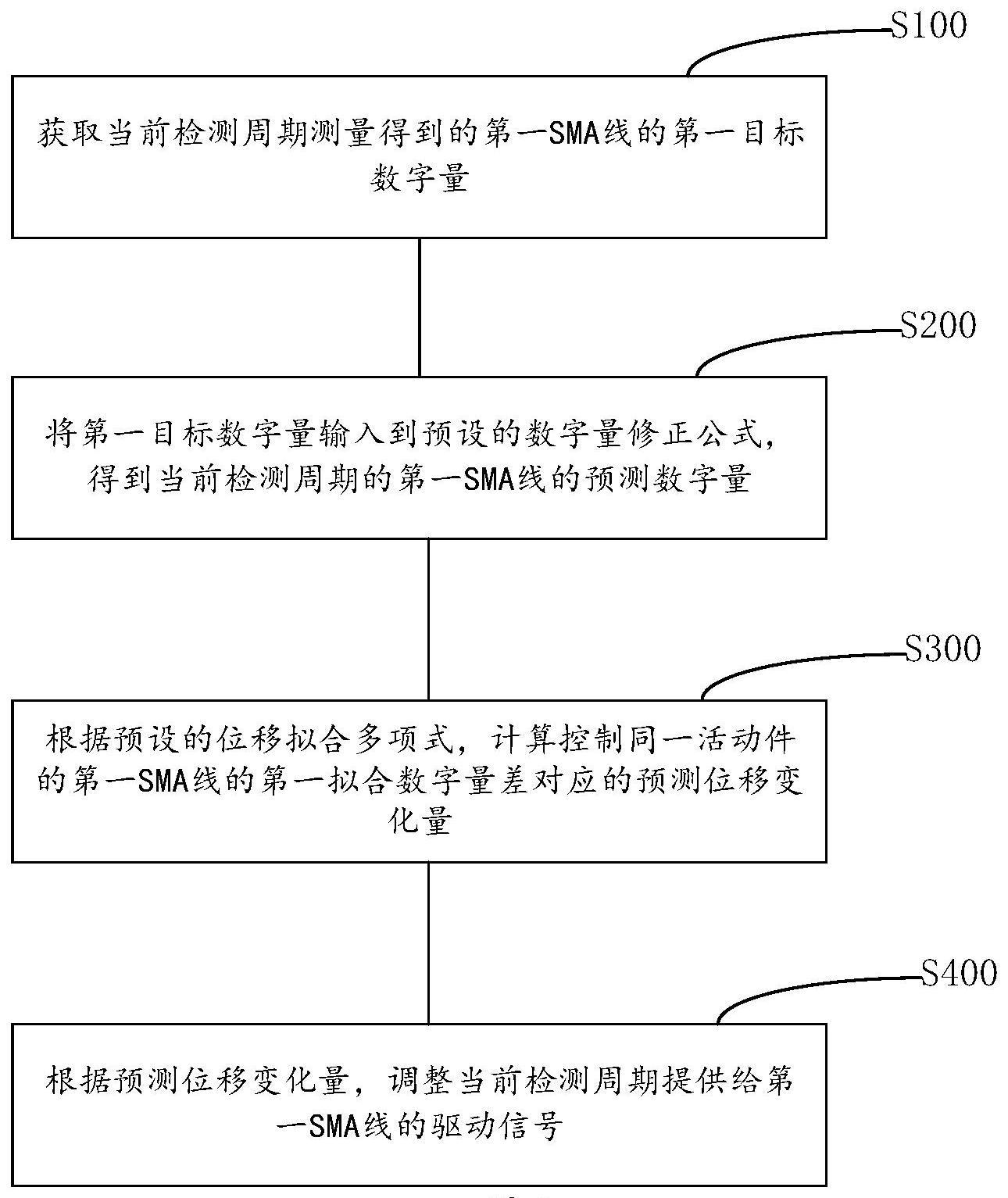
3、获取当前检测周期测量得到的第一sma线的第一目标数字量,所述第一目标数字量用于表征第一sma线两端电压的数字量;
4、将所述第一目标数字量输入到预设的数字量修正公式,得到当前检测周期的第一sma线的预测数字量;其中,所述数字量修正公式用于表征实际测量的数字量的n阶多项式与修正后的预测数字量之间的关系;所述n为大于或等于1的奇数;
5、根据预设的位移拟合多项式,计算控制同一活动件的第一sma线的第一拟合数字量差对应的预测位移变化量;所述第一拟合数字量差为同一所述第一sma线在当前检测周期的预测数字量与上一检测周期的预测数字量的差值;
6、根据所述预测位移变化量,调整当前检测周期提供给所述第一sma线的驱动信号。
7、第二方面,本申请还提供一种致动结构,包括:
8、电压供应器件,所述电压供应器件用于提供供应电压;
9、第一sma线,所述第一sma线的一端与所述电压供应器件的输出端电气连接;
10、活动件,所述第一sma线的另一端与所述活动件连接,以通过所述第一sma线驱动所述活动件移动;
11、控制模块,所述控制模块用于执行如第一方面任一所述的方法。
12、第三方面,本申请还提供一种存储介质,包括存储有计算机可执行指令,所述计算机可执行指令用于执行如第一方面任一所述的形状记忆合金线的闭环控制方法。
13、根据本申请的上述实施例,至少具有如下有益效果:通过设置数字量修正公式对第一目标数字量进行线性修正,使得预测数字量更加符合第一sma线的实际值,从而依据该值进行位移计算的精度更高。同时,通过设置位移拟合多项式,计算第一拟合数字量差对应的预测位置值,从而可以计算出相邻两个检测周期的位移变化量,而位移拟合多项式采用多项式拟合的方式对第一拟合数字量差进行拟合,无需对预测数字量进行转换,且多项式拟合的方式仅涉及加法以及乘法,因此,程序计算的效率更高,控制响应更为及时,从而能够进一步提升位移控制精度。因此,和相关计算相比,本申请实施例的预测位移变化量的计算精度以及计算效率更高,从而提升位移控制的精度。
14、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种基于非线性补偿的驱动控制的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于非线性补偿的驱动控制的方法,其特征在于,所述第一sma线用于独立驱动控制一个活动件,所述位移拟合多项式包括第一位移拟合子公式;所述根据预设的位移拟合多项式,计算控制同一活动件的第一sma线的第一拟合数字量差对应的预测位移变化量,包括:
3.根据权利要求1所述的基于非线性补偿的驱动控制的方法,其特征在于,所述第一sma线用于和第二sma线共同驱动控制一个活动件,且所述第一sma线和所述第二sma线的驱动方向相反;所述位移拟合多项式包括第二位移拟合子公式;
4.根据权利要求1所述的基于非线性补偿的驱动控制的方法,其特征在于,所述根据预设的位移拟合多项式,计算控制同一活动件的第一sma线的第一拟合数字量差对应的预测位移变化量,包括:
5.根据权利要求1所述的基于非线性补偿的驱动控制的方法,其特征在于,所述获取当前检测周期的第一目标数字量,包括:
6.根据权利要求5所述的基于非线性补偿的驱动控制的方法,其特征在于,所述分压电阻设置有至少两个,所述运算放大器与其中一个所述分压电阻并联,且所述运算放大器与供应电压之间至少设置有一个所述分压电阻或者设置有所述第一sma线。
7.根据权利要求6所述的基于非线性补偿的驱动控制的方法,其特征在于,两个所述分压电阻位于所述第一sma线和供应电压之间,靠近所述第一sma线的所述分压电阻并联所述运算放大器。
8.根据权利要求6所述的基于非线性补偿的驱动控制的方法,其特征在于,并联有所述运算放大器的所述分压电阻位于所述第一sma线远离供应电压的一端。
9.一种致动结构,其特征在于,包括:
10.一种存储介质,其特征在于,包括存储有计算机可执行指令,所述计算机可执行指令用于执行如权利要求1至8任一所述的方法。
技术总结
本发明公开了一种基于非线性补偿的驱动控制的方法、致动结构及存储介质,涉及摄像技术领域。方法包括获取当前检测周期测量得到的第一SMA线的第一目标数字量,第一目标数字量用于表征第一SMA线两端电压的数字量;将第一目标数字量输入到预设的数字量修正公式,得到当前检测周期的第一SMA线的预测数字量;数字量修正公式用于表征实际测量的数字量的n阶多项式与修正后的预测数字量之间的关系;根据预设的位移拟合多项式,计算第一SMA线在当前检测周期的预测数字量与上一检测周期的预测数字量的差值对应的预测位移变化量;根据预测位移变化量,调整当前检测周期提供给第一SMA线的驱动信号。本申请实施例能可以提升位移控制的精度。
技术研发人员:朱卫聪
受保护的技术使用者:深圳市芯歌电子科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!