一种基于物联网的巡检机器人控制系统的制作方法
本发明涉及控制领域,尤其涉及一种基于物联网的巡检机器人控制系统。
背景技术:
1、传统的变电站巡检是通过人工进行的,但是人工巡检存在巡检工作量大,巡检记录难利用的问题,因为人工巡检一般都是手动记录巡检情况,当巡检记录为纸质文件时,则还需要进行人工录入才能使用。随着机器人技术的发展,逐渐出现了利用巡检机器人对变电站进行巡检的方式。
2、巡检机器人与控制中心之间需要通过无线通信的方式来进行通信,对于一些位置较为偏僻的变电站,由于移动通信网络的基站信号没有进行覆盖,需要自行建立无线通信网络来实现巡检机器人与控制中心之间的通信。
3、而现有技术中,巡检机器人与无线通信网络中的通信节点进行通信时,一般都是直接选择信号强度最大的通信节点作为通信目标,但是巡检机器人在通信过程中可能是移动的,此时,巡检机器人可能会逐渐移动到通信目标的信号强度较低的地方,若巡检机器人刚好处于通信目标的信号强度最强的位置时开始与通信目标进行通信,则通信过程可能还没完成便需要切换另一个通信节点作为通信目标,而重新选择通信目标又要重新进行接入认证等步骤,这就导致巡检机器人与控制中心之间的通信效率受到影响。
技术实现思路
1、本发明的目的在于公开一种基于物联网的巡检机器人控制系统,解决如何提高巡检机器人与通信节点之间的通信效率的问题。
2、为了达到上述目的,本发明提供如下技术方案:
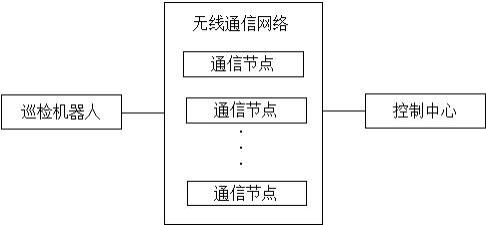
3、一种基于物联网的巡检机器人控制系统,包括巡检机器人、无线通信网络和控制中心;
4、控制中心用于将遥控指令发送至无线通信网络;
5、无线通信网络用于将遥控指令转发至巡检机器人;
6、巡检机器人用于根据遥控指令对变电站进行巡检,并将巡检数据发送至无线通信网络;
7、无线通信网络还用于将巡检数据转发至控制中心;
8、无线通信网络包括多个通信节点;
9、其中,将巡检数据发送至无线通信网络,包括:
10、巡检机器人获取处于通信范围内的通信节点的集合;
11、若巡检机器人处于静止状态,则直接将巡检数据发送至中信号强度最大的通信节点;
12、若巡检机器人处于运动状态,则计算中的每个通信节点的连接概率系数:
13、连接概率系数的计算公式为:
14、
15、表示通信节点g的连接概率系数,表示通信节点g的不连续性参数,表示中的通信节点的不连续性参数的最大值,表示通信节点g的范围参数,表示中的通信节点的范围参数的最大值,表示通信节点g的距离参数,表示中的通信节点的距离参数的最大值,、、分别表示不连续性参数、范围参数、距离参数的权重;
16、将巡检数据发送至中连接概率系数最大的通信节点。
17、优选的,控制中心包括输入模块、通信模块和数据库模块;
18、输入模块用于变电站的负责巡检工作的员工输入遥控指令;
19、通信模块用于将通信指令发送至无线通信网络,以及用于接收从无线通信网络发过来的巡检数据;
20、数据库模块用于保存巡检数据。
21、优选的,多个通信节点均匀分布在变电站中,任意两个相邻的通信节点之间的距离均相同。
22、优选的,遥控指令包括任务指令、移动指令、设备控制指令中的一种或多种。
23、优选的,任务指令包括巡检路径和巡检方案,巡检方案包括巡检开始时间、巡检结束时间和巡检路径上的停留位置。
24、优选的,移动指令包括目标位置和移动速度。
25、优选的,设备控制指令用于对巡检机器人上携带的巡检设备进行控制。
26、优选的,对巡检机器人上携带的巡检设备包括可见光相机、红外相机、温度传感器、湿度传感器、测距传感器、超声波传感器中的一种或多种。
27、优选的,巡检数据包括温度数据、湿度数据和图像数据。
28、优选的,直接将巡检数据发送至中信号强度最大的通信节点,包括:
29、将中信号强度最大的通信节点保存到信号强度集合;
30、若中的通信节点只有一个,则直接将巡检数据发送至信号强度最大的通信节点;
31、若中的通信节点的数量大于1,则计算中的通信节点的通信指向参数,将巡检数据发送至通信指向参数最大的通信节点;
32、通信指向参数的计算公式为:
33、
34、其中,为通信节点c的通信指向参数,为比例参数,,表示连接通信节点c与控制中心之间的直线线段的长度,为变电站边缘与控制中心之间的直线线段的长度的最大值,表示连接通信节点c与巡检机器人之间的直线线段的长度,表示中的通信节点与巡检机器人之间的直线线段的长度的最大值。
35、与现有的直接将信号强度作为通信目标的选择方式不同,本发明根据巡检机器人的不同的状态分别为巡检机器人设置了不同电力选择通信目标的方式,使得巡检机器人切换通信节点的概率降低,从而提高巡检机器人与控制中心之间的通信效率。具体的,当巡检机器人处于静止状态时,则将信号强度作为通信目标的选择参数。从而实现更高速率的通信。当巡检机器人处于运动状态时,本发明综合不连续性参数、范围参数、距离参数来综合得到连接概率系数,然后基于连接概率系数来选择通信目标,从而有效地降低了巡检机器人切换通信节点的概率。
技术特征:
1.一种基于物联网的巡检机器人控制系统,其特征在于,包括巡检机器人、无线通信网络和控制中心;
2.根据权利要求1所述的一种基于物联网的巡检机器人控制系统,其特征在于,控制中心包括输入模块、通信模块和数据库模块;
3.根据权利要求1所述的一种基于物联网的巡检机器人控制系统,其特征在于,多个通信节点均匀分布在变电站中,任意两个相邻的通信节点之间的距离均相同。
4.根据权利要求1所述的一种基于物联网的巡检机器人控制系统,其特征在于,遥控指令包括任务指令、移动指令、设备控制指令中的一种或多种。
5.根据权利要求4所述的一种基于物联网的巡检机器人控制系统,其特征在于,任务指令包括巡检路径和巡检方案,巡检方案包括巡检开始时间、巡检结束时间和巡检路径上的停留位置。
6.根据权利要求4所述的一种基于物联网的巡检机器人控制系统,其特征在于,移动指令包括目标位置和移动速度。
7.根据权利要求4所述的一种基于物联网的巡检机器人控制系统,其特征在于,设备控制指令用于对巡检机器人上携带的巡检设备进行控制。
8.根据权利要求7所述的一种基于物联网的巡检机器人控制系统,其特征在于,对巡检机器人上携带的巡检设备包括可见光相机、红外相机、温度传感器、湿度传感器、测距传感器、超声波传感器中的一种或多种。
9.根据权利要求1所述的一种基于物联网的巡检机器人控制系统,其特征在于,巡检数据包括温度数据、湿度数据和图像数据。
10.根据权利要求1所述的一种基于物联网的巡检机器人控制系统,其特征在于,直接将巡检数据发送至中信号强度最大的通信节点,包括:
技术总结
本发明属于控制领域,公开了一种基于物联网的巡检机器人控制系统,包括巡检机器人、无线通信网络和控制中心;控制中心用于将遥控指令发送至无线通信网络;无线通信网络用于将遥控指令转发至巡检机器人;巡检机器人用于根据遥控指令对变电站进行巡检,并将巡检数据发送至无线通信网络;无线通信网络还用于将巡检数据转发至控制中心。与本发明根据巡检机器人的不同的状态分别为巡检机器人设置了不同电力选择通信目标的方式,使得巡检机器人切换通信节点的概率降低,从而提高巡检机器人与控制中心之间的通信效率。
技术研发人员:赵洪丹,徐清山,张轶珠,王建龙,段文宝,刘长志,王瀚,岳科宇,郑宇,王阔,李卓,李国波,王玉,王晨,刘镇宁,冯小娟
受保护的技术使用者:国网吉林省电力有限公司辽源供电公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!