基于抖动检测与相干时间的无人机对船通信信道切换方法
本发明涉及无人机无线通信,具体涉及一种基于抖动检测与相干时间的无人机对船通信信道切换方法。
背景技术:
1、随着人类在海洋上的各种活动增多,对无线通信的需求不断增加。目前,用于近海水域的常规通信系统主要包括海上无线电通信、海上卫星通信和基于陆地蜂窝网络的岸基移动通信。无人机在敏捷通信方面已经显示出相当大的前景,基于无人机的无线通信系统也作为提供高数据速率无线通信服务的一种有希望且有效的方法受到了广泛的关注,
2、其中,本发明发明人在实现基于抖动检测与相干时间的无人机对船通信智能信道切换策略中发现,如何解决海-空无线通信中由于舰船的随机抖动而导致的收发天线失配问题是无人机海-空通信的关键。对于无人机无线通信信道,当信道载频较高时,无论是发射端还是接收端的随机抖动可能会严重恶化无线通信信道质量,因为随机抖动引起的路径变化比波长的变化更为关键。尽管这些工作解决了毫米波波段信道与无人机抖动相关的关键问题,但如何具体量化其对毫米波无线通信信道的影响,以及如何给出减少影响的方法,仍然值得研究。
3、同时,在动态环境中,由于数据速率、路径损耗等参数之间的权衡,仅使用一个频谱是低效的。对于较高的频率,吞吐量较高,但损失较大,而对于较低的频率则相反。最好的方法就是采用频谱交换的策略,可以充分利用了每个频谱带的特性,其主要思想是在整个频段最优化地利用数据速率、吞吐量和路径损耗等属性的变化。现有方法中通常使用发射端与接收端之间的距离,或信噪比作为信道切换的阈值参数,但对于多径效应非常严重的海-空通信环境中,无论是基于距离的还是基于信噪比的信道切换策略,都无法达到最优的效果。
技术实现思路
1、本发明提供了一种基于抖动检测与相干时间的无人机对船通信信道切换方法,以解决现有技术中信道切换效率低,切换阈值参数不够合理等问题。
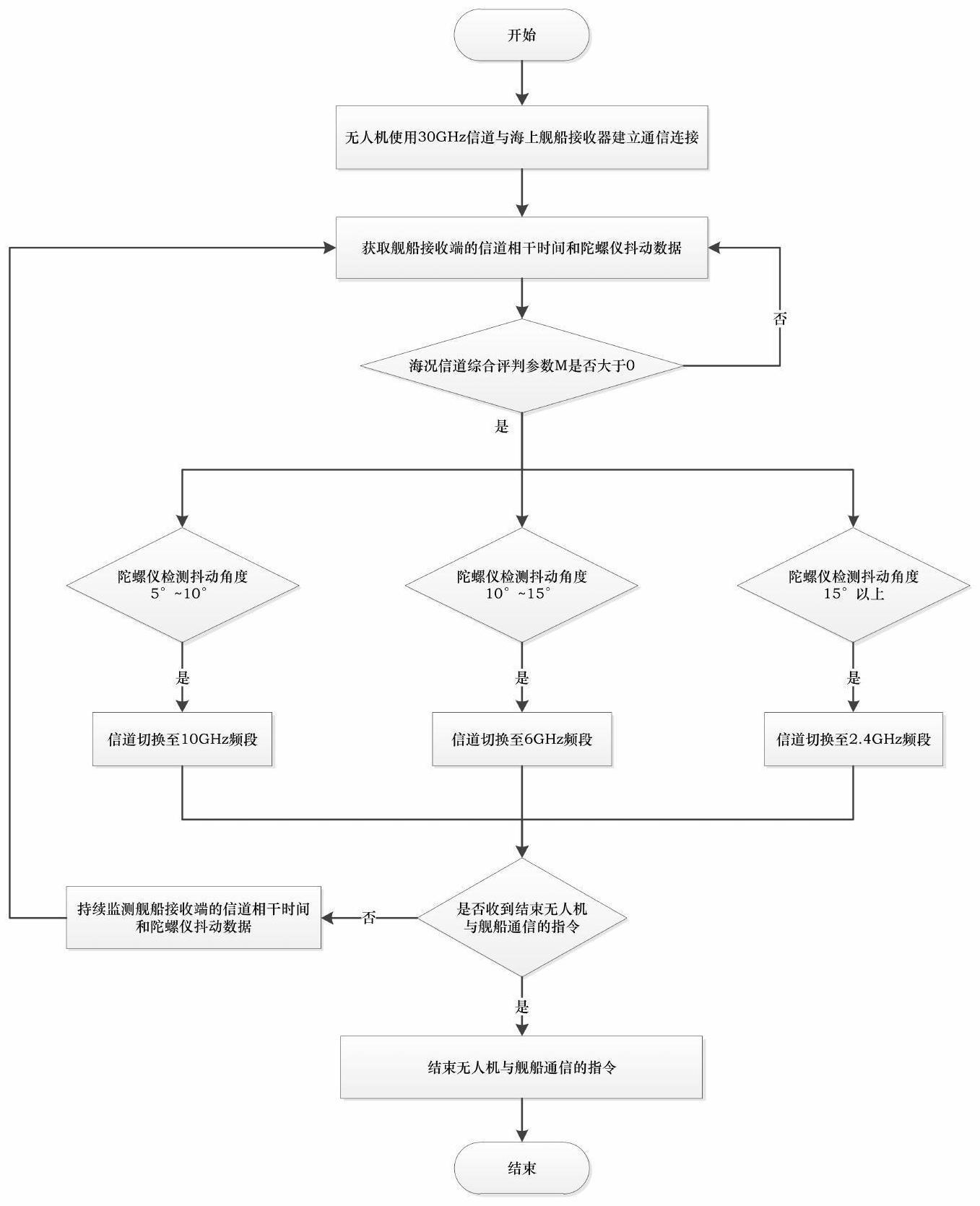
2、本发明提供了一种基于抖动检测与相干时间的无人机对船通信信道切换方法,包括如下步骤:
3、步骤1:初始化整个海-空通信系统,获取船舶当前晃动角度、信道相干时间、海面反射损失;
4、步骤2:根据信道相干时间、海面反射损失计算海况信道综合评判参数,具体计算公式如下:
5、m=(tc-α)-[1+log(β-l)]
6、式中,tc为信道相干时间;l为海面反射损失;α,β设定为常数;
7、步骤3:根据海况信道综合评判参数实时选择通信信道,具体为:
8、当海况信道综合评判参数小于零时,选择30ghz频段进行通信;
9、当海况信道综合评判参数大于等于零,且船舶当前晃动角度在5°~10°范围内时,选择10ghz频段进行通信;
10、当海况信道综合评判参数大于等于零,且船舶当前晃动角度在10°~15°范围内时,选择6ghz频段进行通信;
11、当海况信道综合评判参数大于等于零,且船舶当前晃动角度大于15°时,选择2.4ghz频段进行通信。
12、进一步地,所述信道相干时间的计算公式如下:
13、
14、进一步地,所述海面反射损失的计算公式为:
15、l=10logr(db)
16、式中,r为反射系数。
17、进一步地,所述信道相干时间的计算公式中γ为0.5。
18、进一步地,所述海况信道综合评判参数的计算公式中,α=10,β=-2。
19、本发明的有益效果:
20、本发明通过海上舰船陀螺仪获取船舶晃动数据、获取通信接收端信道数据,根据海面反射损失构建综合的信道状态方式,同时结合在舰船持续抖动幅度超过一定角度且无人机与舰船之间的通信信道相干时间持续低于某一阈值时进行信道切换,可以达到高信道容量与信道稳定性的平衡。
21、本发明在海上无线通信智能信道切换过程中引入信道相干时间作为切换阈值参数,依据这种机制可使整个海上无线通信信道切换过程更加适合多反射路径的海上无线通信环境,获得更高的信道切换效率。
22、上述两种效果分别解决了现有基于距离或基于信噪比的信道切换技术中,存在的信道切换效率低,切换阈值参数不适合海上无线通信等问题。
技术特征:
1.一种基于抖动检测与相干时间的无人机对船通信信道切换方法,包括如下步骤:
2.如权利要求1所述的基于抖动检测与相干时间的无人机对船通信信道切换方法,其特征在于,所述信道相干时间的计算公式如下:
3.如权利要求1所述的基于抖动检测与相干时间的无人机对船通信信道切换方法,其特征在于,所述海面反射损失的计算公式为:
4.如权利要求2所述的基于抖动检测与相干时间的无人机对船通信信道切换方法,其特征在于,所述信道相干时间的计算公式中γ为0.5。
5.如权利要求1所述的基于抖动检测与相干时间的无人机对船通信信道切换方法,其特征在于,所述海况信道综合评判参数的计算公式中,α=10,β=-2。
技术总结
本发明公开了一种基于抖动检测与相干时间的无人机对船通信信道切换方法,包括如下步骤:步骤1:初始化整个海‑空通信系统,获取船舶当前晃动角度、信道相干时间、海面反射损失;步骤2:根据信道相干时间、海面反射损失计算海况信道综合评判参数;步骤3:根据海况信道综合评判参数实时选择通信信道。本发明通过海上舰船陀螺仪获取船舶晃动数据、获取通信接收端信道数据,根据海面反射损失构建综合的信道状态方式,同时结合在舰船持续抖动幅度超过一定角度且无人机与舰船之间的通信信道相干时间持续低于某一阈值时进行信道切换,可以达到高信道容量与信道稳定性的平衡。
技术研发人员:王琦,沈宏杰,罗浩,陈建军,徐丹,于化龙,高尚
受保护的技术使用者:江苏科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!