一种两轴四框架光电吊舱内部通信方法及系统与流程
本发明属于光电吊舱系统内部通信,具体涉及两轴四框架光电吊舱内部通信。
背景技术:
1、光电吊舱内部通常由多个控制系统组成,不同系统分别由各自的mcu主控芯片控制,完成不同的功能,例如有负责与外界数据指令通信的主控器系统,有负责俯仰轴系运动的俯仰伺服控制系统等,各系统间的通信通常采用rs-232、rs-485或rs422等通信方式,系统间通信需要专用通信芯片和至少两条以上通信线路,而小型化的两轴四框架吊舱系统,由于空间紧凑,电路板尺寸、布局和系统间走线有着严格限制,所以往往需要额外的电平转换或驱动芯片,这造成了两轴四框架吊舱系统的通讯链路组成复杂,不利于设备小型化。
技术实现思路
1、本发明提供一种两轴四框架光电吊舱内部通信方法及系统,解决了现有技术中两轴四框架吊舱系统需要额外的电平转换或驱动芯片,造成两轴四框架吊舱系统的通讯链路组成复杂,不利于设备小型化的问题。
2、方案一、一种两轴四框架光电吊舱内部通信方法,所述方法具体为:在两轴四框架光电吊舱的主控系统、方位外框架控制系统、俯仰外框架控制系统和内框架控制系统之间采用ttl电平通信单总线进行信号传输。
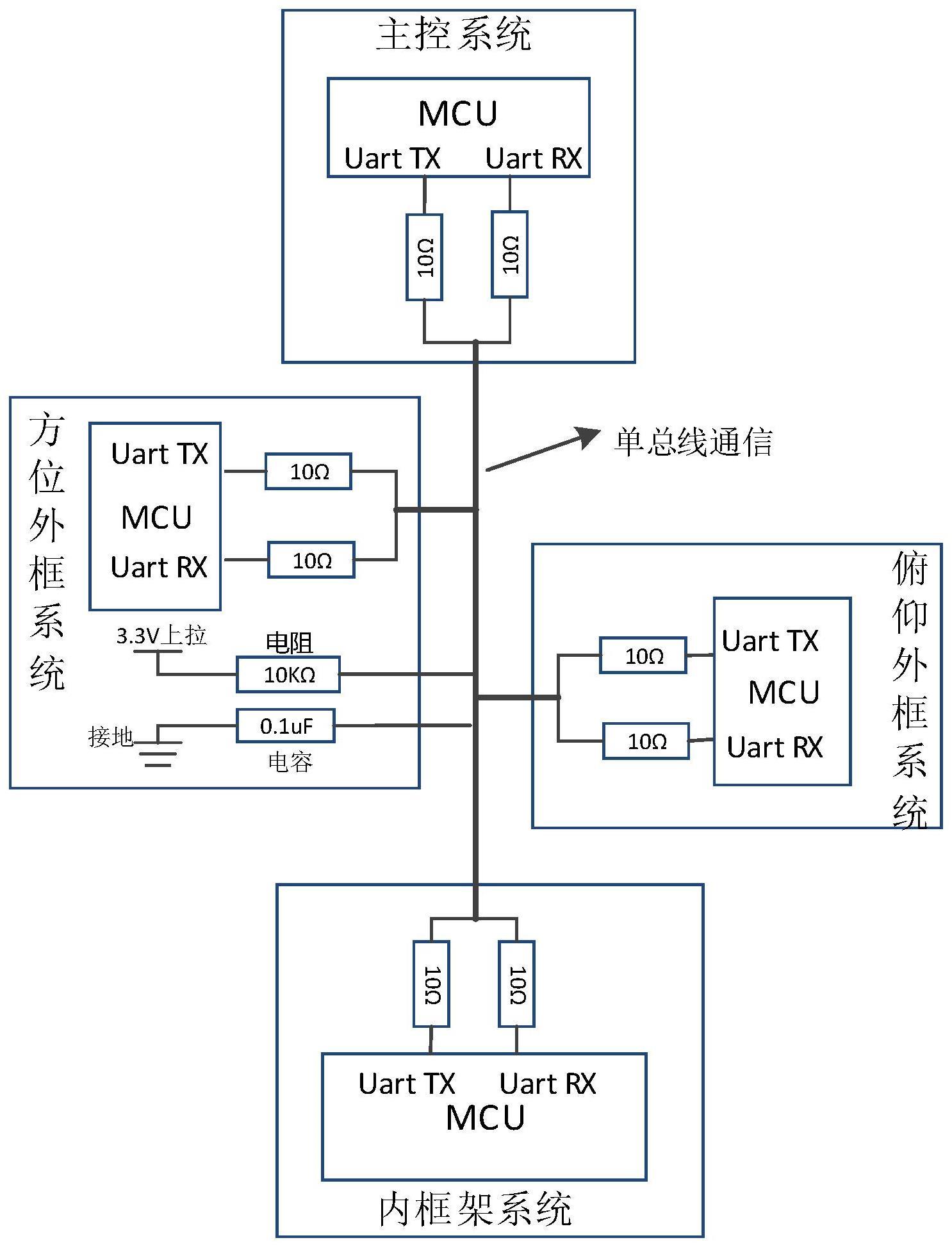
3、方案二、一种两轴四框架光电吊舱内部通信系统,所述系统包括主控系统、方位外框架控制系统、俯仰外框架控制系统、内框架控制系统和通信线路,所述通信线路上设置四个端口,所述四个端口分别与主控系统mcu、方位外框架控制系统mcu、俯仰外框架控制系统mcu和内框架控制系统mcu连接,实现上述四个系统之间的通信;
4、所述通信线路使用fpc软排线,所述fpc软排线的两外侧线分别设置为电源线和回线,所述fpc软排线的电源线和回线之间设置ttl电平通信单总线。
5、进一步,所述通信线路还包括两个端口,通过其中一个端口将ttl电平通信单总线通过10k欧姆上拉电阻接到3.3伏电源上,通过另一个端口将ttl电平通信单总线通过0.1μf电容接地。
6、进一步,所述主控系统mcu中的tx和tr引脚先分别与10欧姆电阻串联后,再并联,然后再与通信线路的一个端口连接。
7、进一步,所述方位外框架控制系统mcu中的tx和tr引脚先分别与10欧姆电阻串联后,再并联,然后再与通信线路的一个端口连接。
8、进一步,所述俯仰外框架控制系统mcu中的tx和tr引脚先分别与10欧姆电阻串联后,再并联,然后再与通信线路的一个端口连接。
9、进一步,所述内框架控制系统mcu中的tx和tr引脚先分别与10欧姆电阻串联后,再并联,然后再与通信线路的一个端口连接。
10、本发明所述系统的有益效果为:
11、(1)采用ttl电平的单总线通信方式,只需要一根通信线缆,无需通信驱动芯片,即保证了通信可靠性,又减小了通信传输的复杂性和成本,适合空间狭小的小型光电吊舱系统内部通信上使用;
12、(2)已有的通信技术应用在多mcu之间串行通信,通过mcu芯片自带uart接口直接互连传递数据方式,这种通信方式连接简单不需要额外的电平转换或驱动芯片,缺点是抗电磁干扰性能较差,多用在没有电磁干扰环境下的多mcu的短距离通信。由于光电吊舱应用环境复杂,电磁干扰多,不能直接应用ttl电平通信。本发明所述系统通过技术改进,把这种通信技术应用到光电吊舱系统内部通信上,改进后的通信减少到只用一根通信线缆,且不需要通信驱动芯片,通过对ttl电平通信结构的重新设计来增强通信链路的抗干扰能力。
13、本发明所述方法及系统可以应用在两轴四框架光电吊舱系统内部通信领域,两轴四框架光电吊舱系统设计与制造领域。
技术特征:
1.一种两轴四框架光电吊舱内部通信方法,其特征在于,所述方法具体为:在两轴四框架光电吊舱的主控系统、方位外框架控制系统、俯仰外框架控制系统和内框架控制系统之间采用ttl电平通信单总线进行信号传输。
2.一种两轴四框架光电吊舱内部通信系统,所述系统包括主控系统、方位外框架控制系统、俯仰外框架控制系统、内框架控制系统和通信线路,其特征在于,所述通信线路上设置四个端口,所述四个端口分别与主控系统mcu、方位外框架控制系统mcu、俯仰外框架控制系统mcu和内框架控制系统mcu连接,实现上述四个系统之间的通信;
3.根据权利要求2所述的两轴四框架光电吊舱内部通信系统,其特征在于,所述通信线路还包括两个端口,通过其中一个端口将ttl电平通信单总线通过10k欧姆上拉电阻接到3.3伏电源上,通过另一个端口将ttl电平通信单总线通过0.1μf电容接地。
4.根据权利要求2所述的两轴四框架光电吊舱内部通信系统,其特征在于,所述主控系统mcu中的tx和tr引脚先分别与10欧姆电阻串联后,再并联,然后再与通信线路的一个端口连接。
5.根据权利要求2所述的两轴四框架光电吊舱内部通信系统,其特征在于,所述方位外框架控制系统mcu中的tx和tr引脚先分别与10欧姆电阻串联后,再并联,然后再与通信线路的一个端口连接。
6.根据权利要求2所述的两轴四框架光电吊舱内部通信系统,其特征在于,所述俯仰外框架控制系统mcu中的tx和tr引脚先分别与10欧姆电阻串联后,再并联,然后再与通信线路的一个端口连接。
7.根据权利要求2所述的两轴四框架光电吊舱内部通信系统,其特征在于,所述内框架控制系统mcu中的tx和tr引脚先分别与10欧姆电阻串联后,再并联,然后再与通信线路的一个端口连接。
技术总结
一种两轴四框架光电吊舱内部通信方法及系统。属于光电吊舱系统内部通信技术领域,具体涉及两轴四框架光电吊舱内部通信技术领域。其解决了现有技术中两轴四框架吊舱系统需要额外的电平转换或驱动芯片,造成两轴四框架吊舱系统的通讯链路组成复杂,不利于设备小型化的问题。所述系统包括主控系统、方位外框架控制系统、俯仰外框架控制系统、内框架控制系统和通信线路,所述通信线路连接上述系统,所述通信线路使用FPC软排线,所述FPC软排线的两外侧线分别设置为电源线和回线,所述FPC软排线的电源线和回线之间设置TTL电平通信单总线。本发明所述方法及系统可以应用在两轴四框架光电吊舱系统内部通信领域,两轴四框架光电吊舱系统设计与制造领域。
技术研发人员:冷雪,张英鹏,唐博,张佳俊
受保护的技术使用者:长春长光睿视光电技术有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!