一种切换异构不确定性下分布式数据驱动协同方法
本发明涉及分布式探测系统协同,具体涉及一种切换异构不确定性下分布式数据驱动协同方法。
背景技术:
1、分布式探测系统在诸如传感器网络、无人系统等领域都有着广泛的应用,因此针对分布式系统的协同方法、理论以及应用的研究在近几年内层出不穷。但是这些研究中仍然存在较多的限制。首先,在传统的研究中,协同方法大多是基于模型的,即需要预先构建系统模型或者利用收集到的数据进行系统辨识。但是随着系统规模的不断增加,系统辨识的难度和计算量也呈现出指数级别的增长。
2、为了解决上述问题,基于数据驱动的方法在这几年中掀起了研究热潮。这种方法直接从数据中学习到系统的控制法则,从而实现对系统的控制。但是现有的方法大多依赖于强化学习,这一方法需要大量的数据集进行预先训练,在数据样本较小的情况下无法达到期望的控制效果。
3、另一方面,分布式系统在实际运行时受到各种外界环境和任务需求的变化,从而为各单体的系统动态方程中引入了动态的不确定性。传统的分布式系统协同方法大多针对单一类型的不确定性,并未考虑异构以及切换不确定性,从而无法对复杂多变的真实环境进行准确描述。
4、因此,目前亟需一种方法,能够基于系统的数据直接得到分布式控制方法,使得未知分布式系统能够在异构切换的不确定性下实现协同一致。
技术实现思路
1、有鉴于此,本发明提供了一种切换异构不确定性下分布式数据驱动协同方法,能够直接基于分布式系统的输入-状态数据,无需预先的系统辨识步骤,设计分布式控制器,实现分布式系统的协同一致。
2、为达到上述目的,本发明的技术方案为:该方法用于针对未知分布式系统构造控制器,使得未知分布式系统在异构切换有界不确定性下实现一致;未知分布式系统包含n个单体分别用i=1,2,…,n表示,每个单体i中包含系统和控制器两部分。
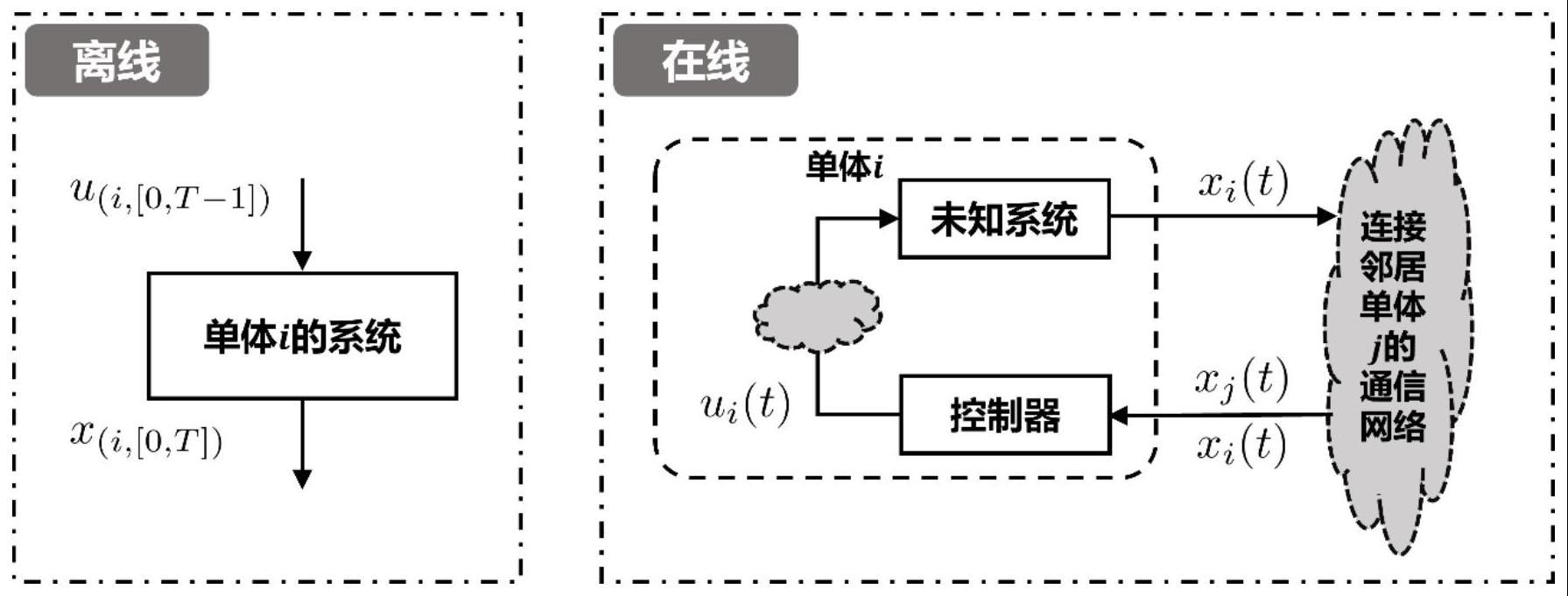
3、该数据驱动协同方法包括两个阶段,分别为:
4、离线数据收集阶段:在离线数据收集阶段,各单体间不进行数据交互,同时在每个单体中,系统不与控制器连接,直接向系统施加一列持续激励的输入序列,并且收集各单体的状态,记录输入和状态数据;利用收集到的输入和状态数据,以及不确定性边界,为每一单体构造粗糙集合。
5、在线运行阶段,各个单体之间的通讯网络满足一个连通的无向图,每个单体的控制器侧每一时刻收集到系统侧发来的状态,结合对应的粗糙集合,通过求解一个半正定优化问题sdp得到当前时刻控制增益,同时,系统侧还接收到的邻居发来的当前时刻状态,将控制增益、自身状态以及邻居状态带入分布式控制法则生成控制输入,将生成的控制输入发送至系统侧对系统进行控制。
6、进一步地,离线数据收集阶段具体包括如下步骤:
7、s1:直接向每个单体i的系统施加控制输入,并且收集各单体i的状态,进行记录。利用施加的控制输入、和收集到的状态,对每个单体i构建输入数据矩阵ui、状态数据矩阵xi、演化状态数据矩阵xi+以及状态-输入数据矩阵wi。
8、s2:给定常数δi作单体的不确定性边界,利用s1中获得的矩阵为每一单体i构造粗糙集合
9、进一步地,在线运行阶段具体为:
10、s3、各个单体之间的通讯网络满足一个连通的无向图,每个单体不确定性的边界为s2中的δi;每一时刻t,每个单体i获得自己的状态xi(t)并将自己的状态通过通信网络发送至与自己相连的所有单体j。
11、t=0时,给定每一单体的输入ui(0);当t≥1时,对于每一时刻t针对每个单体i,根据单体i上一步的输入、状态和当前的状态数据构造实时集合
12、s4、每个单体i通过求解一个sdp优化问题,估计一个包含实时集合和粗糙集合交集的实时精炼集合
13、s5、针对实时精炼集合每个单体i通过求解一个sdp,得到该单体i在t时刻的控制增益矩阵ki(t)。
14、s6、基于控制增益矩阵,以及此时刻收到的邻居的状态数据,构造时变状态反馈控制器,其中单体i的时变状态反馈控制器为:
15、
16、其中ui(t),xi(t)为单体i在t时刻的输入和状态,xj(t)为单体j在t时刻的状态,aij为邻接矩阵中的第i行j列的元素,di是非负权值标量;
17、在这一时变状态反馈控制器的作用下,分布式系统实现渐进一致。
18、有益效果:
19、1、本发明提供的一种切换异构不确定性下分布式数据驱动协同方法,在离线数据收集阶段,收集每个单体系统输入-状态轨迹和不确定性的边界,构造基于数据的粗糙集合。在线运行阶段,每个单体将实时输入和状态数据融入粗糙集合中得到精炼集合,根据精炼集合设计控制器,从而实现未知分布式系统的协同一致,因此本发明无需预先的系统辨识,只需要数据采样,就可以实现分布式时变状态反馈控制器的设计,在这一分布式时变状态反馈控制器的作用下,分布式系统能够实现渐进一致,最终实现对未知分布式系统进行一致控制。
20、2、本发明提供的一种切换异构不确定性下分布式数据驱动协同方法,在线运行阶段,未知分布式系统的数据驱动控制器仅需要每步在线求解两个低复杂度的sdp,由此可见,本发明获取控制输入所需要的计算量较小。
21、3、本发明提供的一种切换异构不确定性下分布式数据驱动协同方法,未知分布式系统受到异构有界切换不确定性影响,所提出方法能够保证系统的一致。
技术特征:
1.一种切换异构不确定性下分布式数据驱动协同方法,其特征在于,该方法用于针对未知分布式系统构造控制器,使得未知分布式系统在异构切换有界不确定性下实现一致;未知分布式系统包含n个单体分别用i=1,2,…,n表示,每个单体i中包含系统和控制器两部分;
2.如权利要求1所述的一种切换异构不确定性下分布式数据驱动协同方法,其特征在于,所述离线数据收集阶段具体包括如下步骤:
3.如权利要求1所述的一种切换异构不确定性下分布式数据驱动协同方法,其特征在于,所述在线运行阶段具体为:
技术总结
本发明公开了一种切换异构不确定性下分布式数据驱动协同方法,涉及分布式探测系统协同技术领域,在离线数据收集阶段,收集每个单体系统输入‑状态轨迹和不确定性的边界,构造基于数据的粗糙集合。在线运行阶段,每个单体将实时输入和状态数据融入粗糙集合中得到精炼集合,根据精炼集合设计控制器,从而实现未知分布式系统的协同一致,因此本发明无需预先的系统辨识,只需要数据采样,就可以实现分布式时变状态反馈控制器的设计,在这一分布式时变状态反馈控制器的作用下,分布式系统能够实现渐进一致,最终实现对未知分布式系统进行一致控制。
技术研发人员:孙健,刘文婕,王钢,李依霏,李卓,陈杰
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!