旋转机械监控系统的控制器及其通信方法与流程
本发明涉及工业控制,特别涉及一种旋转机械监控系统的控制器及其通信方法。
背景技术:
1、旋转机械监控系统作为旋转机械的关键配套系统,负责整个试验或生产过程中的设备运行状态监测、工艺流程控制和应急处理,对检测精度和过程控制的安全性和稳定性都有着极高的要求。工控产品作为旋转机械监控系统的控制核心,其性能优劣直接关系到旋转机械监控系统的稳定性和可靠性。现旋转机械监控系统一般采用国外成熟工控产品或采用外国嵌入式主控芯片的国内工控产品,核心技术不可控,货期长且价格高。由于现在国际局势紧张,国外产品存在禁运可能性,这将使得旋转机械监控系统的研制和维护受限。同时,使用成熟工控产品研制旋转机械监控系统需要对其进行二次开发,耗费技术人员精力,且成熟工控产品不具备某些旋转机械监控系统领域内的专用功能。另外,现旋转机械工业现场的工业以太网中的某些设备会由于访问短时激增而发生延时应答或丢帧现象。
技术实现思路
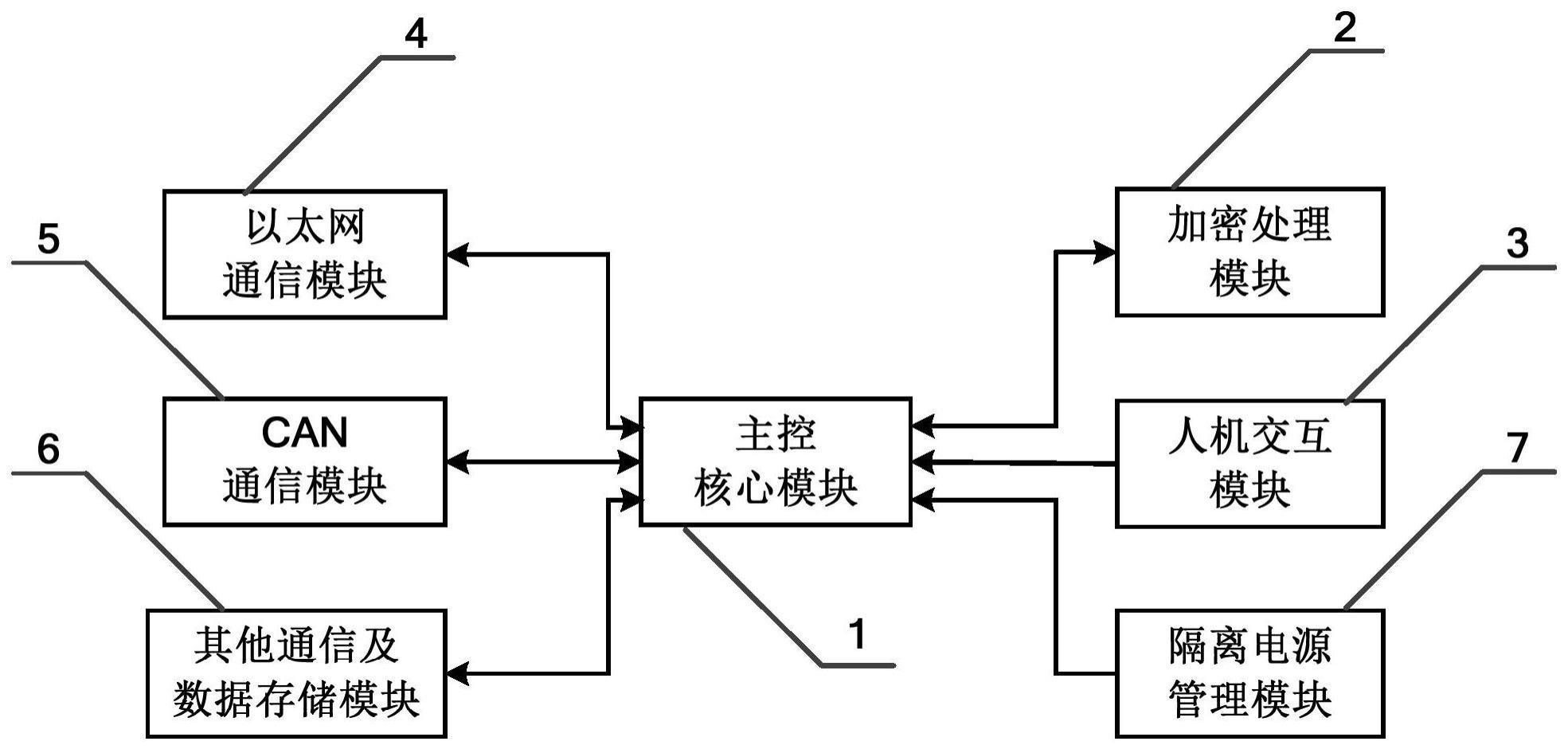
1、有鉴于此,本发明实施例提供了一种旋转机械监控系统的控制器,以解决现有技术中旋转机械监控系统无法自主研发、数据传递存在安全可靠性低的技术问题。该控制器包括:主控核心模块1以及分别与所述主控核心模块1连接的加密处理模块2、以太网通信模块4、can(控制器局域网络)通信模块5以及其他通信及数据存储模块6,其中,
2、所述can通信模块5,用于获取工业现场工艺系统中设备的相关运行参数,并将所述相关运行参数发送给所述主控核心模块1;
3、所述其他通信及数据存储模块6,用于获取工业现场工艺系统中设备的相关运行参数,并将所述相关运行参数发送给所述主控核心模块1;
4、所述以太网通信模块4,用于接收客户端下发的控制指令,并将所述控制指令发送给所述主控核心模块1;
5、所述加密处理模块2,用于对所述相关运行参数加密,生成加密数据并反馈给所述主控核心模块1;还用于对所述控制指令解密,生成解密数据并反馈给所述主控核心模块1;
6、所述主控核心模块1,用于通过所述以太网通信模块4将所述加密数据上传给所述客户端;还用于根据所述相关运行参数和/或所述解密数据生成对所述工业现场工艺系统的逻辑控制指令,并通过所述can通信模块5或所述其他通信及数据存储模块6将所述逻辑控制指令发送给所述工业现场工艺系统中的设备;还用于基于tcp(传输控制协议)协议通过所述以太网通信模块4与所述客户端进行数据交互,并控制同一时刻只允许一个进程访问存储空间中的数据结构区。
7、本发明实施例还提供了一种上述任意旋转机械监控系统的控制器的通信方法,以解决现有技术中旋转机械监控系统无法自主研发、数据传递存在安全可靠性低的技术问题。该通信方法包括:
8、在所述can通信模块5的通信进程开启且所述以太网通信模块4的通信进程开启的情况下,当有客户端访问时,通过所述主控核心模块1检测是否允许访问存储空间中的数据结构区;
9、若是,则通过所述主控核心模块1给所述数据结构区上锁,不允许除了该客户端之外的其他客户端访问所述数据结构区,同时,读取所述数据结构区的最新数据;
10、通过所述主控核心模块1将所述最新数据通过can通信模块5发送,并解锁所述数据结构区;
11、通过所述主控核心模块1将所述最新数据与参数配置进行比较,获得差异化的最新数据,并将差异化的最新数据存入相应存储空间。
12、与现有技术相比,本说明书实施例采用的上述至少一个技术方案能够达到的有益效果至少包括:提出了通过主控核心模块1以及分别与所述主控核心模块1连接的加密处理模块2、以太网通信模块4、can通信模块5以及其他通信及数据存储模块6来构成旋转机械监控系统的控制器,实现了可以通过上述各个模块来自主研发、提供旋转机械领域内的专用控制器,实现了旋转机械监控系统的核心工控设备的自主化,有利于解决旋转机械监控系统可能面临的研制和维护受限的问题;同时,还提出了基于tcp协议通过以太网通信模块4与所述客户端进行数据交互,并控制同一时刻只允许一个进程访问存储空间中的数据结构区,使得可以避免由于访问短时激增而发生延时应答或丢帧的现象,可以实现多客户端同时稳定的与上述控制器进行数据交互,使得有利于提高上述控制器的外部通信性能,进而有利于提高旋转机械监控系统安全性、可靠性和适用性,能够满足旋转机械现场的实际需求。
技术特征:
1.一种旋转机械监控系统的控制器,其特征在于,包括:主控核心模块(1)以及分别与所述主控核心模块(1)连接的加密处理模块(2)、以太网通信模块(4)、can通信模块(5)以及其他通信及数据存储模块(6),其中,
2.如权利要求1所述的旋转机械监控系统的控制器,其特征在于,所述主控核心模块(1),包括:
3.如权利要求2所述的旋转机械监控系统的控制器,其特征在于,所述以太网通信模块(4),包括:
4.如权利要求2所述的旋转机械监控系统的控制器,其特征在于,所述can通信模块(5),包括:
5.如权利要求2所述的旋转机械监控系统的控制器,其特征在于,所述其他通信及数据存储模块(6),包括:
6.如权利要求2所述的旋转机械监控系统的控制器,其特征在于,所述加密处理模块(2),包括:
7.如权利要求2至6中任一项所述的旋转机械监控系统的控制器,其特征在于,还包括:
8.如权利要求2至6中任一项所述的旋转机械监控系统的控制器,其特征在于,还包括:
9.一种权利要求1至8中任一项所述的旋转机械监控系统的控制器的通信方法,其特征在于,包括:
10.如权利要求9所述的旋转机械监控系统的控制器的通信方法,其特征在于,所述主控核心模块(1)通过所述以太网通信模块(4)与所述客户端进行数据交互的帧格式包括固定帧头、帧功能部分、数据规模、数据部分、状态部分和固定帧尾,其中,所述固定帧头和所述固定帧尾分别用来判定帧的开始和结束,与帧长结合判定该帧数据是否完整有效;所述帧功能部分主要表征该帧的功能、帧长度、总帧数和帧序号,总帧数和帧序号用来表征通信的帧顺序;所述数据规模部分用来表征该帧数据部分的数据规模;所述状态部分用来表征所述控制器系统的状态。
11.如权利要求9或10所述的旋转机械监控系统的控制器的通信方法,其特征在于,还包括:
技术总结
本发明实施例提供了一种旋转机械监控系统的控制器及其通信方法,其中,该控制器包括:CAN通信模块和其他通信及数据存储模块获取工业现场工艺系统中设备的相关运行参数发给主控核心模块;以太网通信模块接收客户端下发的控制指令并发给主控核心模块;加密处理模块对相关运行参数加密;对控制指令解密;主控核心模块通过以太网通信模块将加密数据上传给客户端;根据相关运行参数和/或解密数据生成对工业现场工艺系统的逻辑控制指令,通过CAN通信模块或其他通信及数据存储模块将逻辑控制指令发给工业现场工艺系统中的设备;基于TCP协议通过以太网通信模块与客户端进行数据交互,并控制同一时刻只允许一个进程访问存储空间中的数据结构区。
技术研发人员:王麟,马常松,李蕃
受保护的技术使用者:核工业理化工程研究院有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!