时滞补偿方法、成像系统、设备以及存储介质与流程
本发明涉及三维成像,具体涉及一种时滞补偿方法、成像系统、设备以及存储介质。
背景技术:
1、成像系统在工业自动检测、产品质量控制、逆向设计、生物医学、虚拟现实、文物复制、人体成像等众多领域中具有广泛应用。应用成像系统的成像设备主要包括拍照式三维扫描仪、激光三维扫描仪和三坐标成像机等。
2、其中,激光三维扫描仪包括用于发射激光的激光器、用于折射激光实现扫描功能进而使激光以条纹形状投射到场景内的振镜、以及用于拍摄场景条纹图像的相机。振镜在投影时包括加速阶段和匀速阶段,在振镜加速一定时间后进入匀速阶段,在匀速阶段投影出来的条纹图像才能和预设的条纹图像相同,因此需要在确保进入匀速阶段后才进行曝光投影,但是在不同场景中,成像需要设定不同的曝光时刻,以对应不同的振镜的投影时刻,可能使投影出来的条纹图像和预设的条纹图像不同。因此对不同曝光时刻进行时滞补偿是亟待解决的问题。
技术实现思路
1、本公开的目的在于提供一种时滞补偿方法、成像系统以及设备、存储介质。
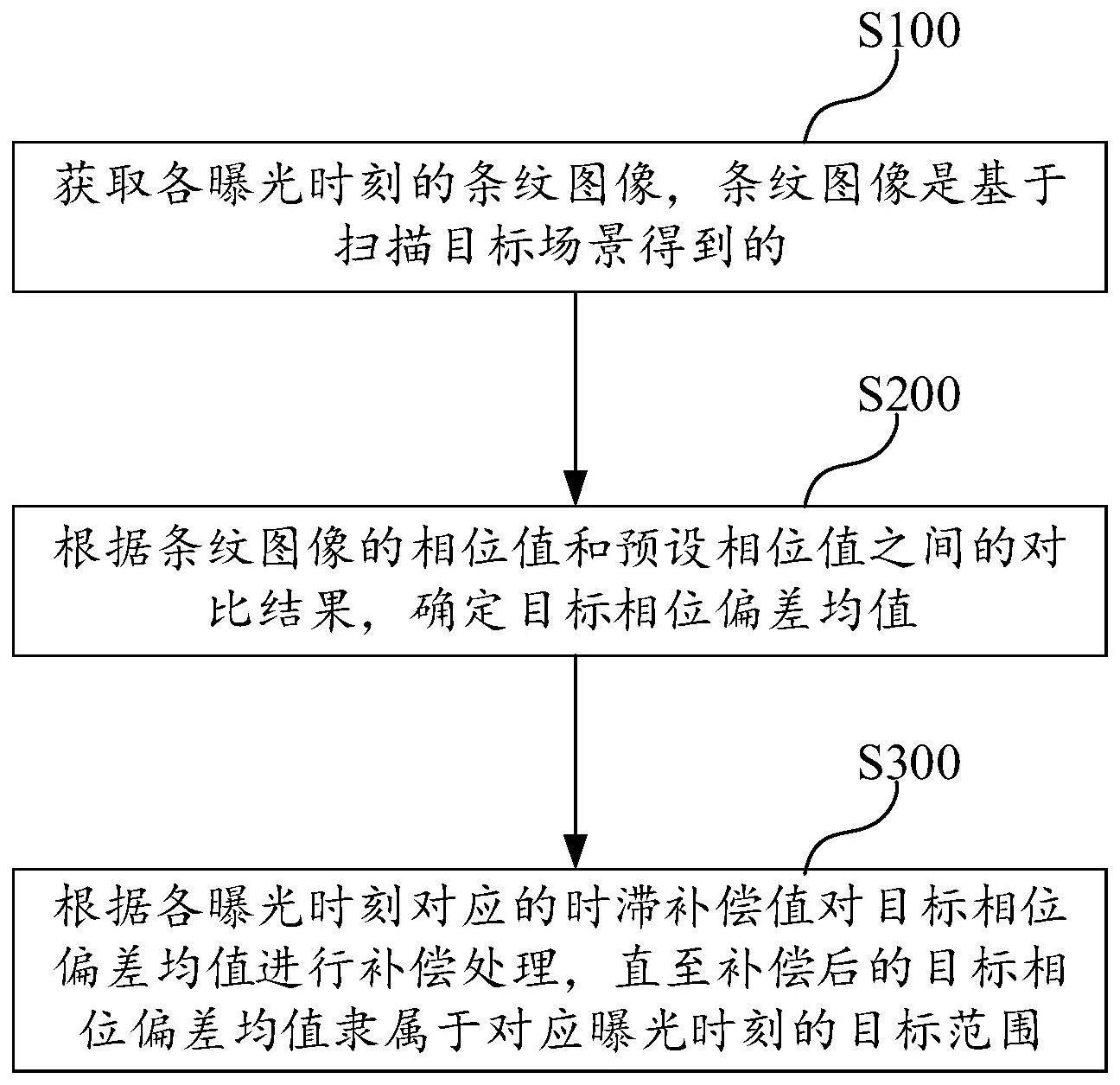
2、本公开提供一种时滞补偿方法,所述方法包括:获取各曝光时刻的条纹图像,所述条纹图像是基于扫描目标场景得到的;根据所述条纹图像的相位值和预设相位值之间的对比结果,确定目标相位偏差均值;根据各曝光时刻对应的时滞补偿值对所述目标相位偏差均值进行补偿处理,直至补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围。
3、在本公开的一种示例性实施例中,所述根据各曝光时刻对应的时滞补偿值对所述目标相位偏差均值进行补偿处理,直至补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围的步骤,包括:若所述目标相位偏差均值为负值,则根据各曝光时刻对应的时滞补偿值进行正向补偿,直至所述补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围;若所述目标相位偏差均值为正值,则根据各曝光时刻对应的时滞补偿值进行负向补偿,直至所述补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围。
4、在本公开的一种示例性实施例中,所述若所述目标相位偏差均值为负值,则根据各曝光时刻对应的时滞补偿值进行正向补偿,直至所述补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围的步骤,包括:根据对应的所述时滞补偿值进行补偿;判断补偿后的目标相位偏差均值是否大于或等于所述目标范围的最小值,且小于或等于所述目标范围的最大值;若是,则停止补偿;若否,则根据对应曝光时刻对应的时滞补偿值对所述补偿后的目标相位偏差均值进行再次补偿,直至再次补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围。
5、在本公开的一种示例性实施例中,所述根据所述曝光时刻的条纹图像的相位值和对应曝光时刻的预设相位值之间的对比结果,确定目标相位偏差均值的步骤,包括:计算各曝光时刻的条纹图像的相位值和对应曝光时刻的预设相位值之间的相位差值;计算各曝光时刻对应的相位差值之间的平均值;将所述平均值作为所述目标相位偏差均值。
6、在本公开的一种示例性实施例中,在所述根据所述曝光时刻的条纹图像的相位值和预设相位值之间的对比结果,确定目标相位偏差均值的步骤之前,所述方法还包括:获取目标曝光时刻对应的目标条纹图像;对所述目标条纹图像对应的相位图像进行解相位处理,得到所述目标条纹图像的相位值;将所述目标条纹图像的相位值作为所述预设相位值。
7、在本公开的一种示例性实施例中,所述根据各曝光时刻对应的时滞补偿值对所述目标相位偏差均值进行补偿处理,直至补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围的步骤之前,所述方法还包括:获取时滞补偿表,所述时滞补偿表包括预设曝光时刻与预设时滞补偿值之间的对应关系;根据获取的曝光时刻从时滞补偿表中选取匹配的预设曝光时刻;将与所述匹配的预设曝光时刻对应的预设时滞补偿值作为所述曝光时刻对应的时滞补偿值。
8、在本公开的一种示例性实施例中,在所述根据各曝光时刻对应的时滞补偿值对所述目标相位偏差均值进行补偿处理,直至补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围的步骤之前,所述方法还包括:获取时滞补偿的拟合函数,所述时滞补偿的拟合函数包括预设曝光时刻与预设时滞补偿值之间的对应关系;根据获取的曝光时刻从所述时滞补偿的拟合函数中确定匹配的预设曝光时刻;将与所述匹配的预设曝光时刻对应的预设时滞补偿值作为所述曝光时刻对应的时滞补偿值。
9、在本公开的一种示例性实施例中,所述获取各曝光时刻的条纹图像的步骤,包括:根据接收到的控制信号扫描所述目标场景,得到对应曝光时刻的条纹图像,所述控制信号包括振镜驱动信号以及相机曝光信号,所述振镜驱动信号与所述相机曝光信号的信号周期相同。
10、本申请还提供一种成像系统,包括:获取模块、对比模块和补偿模块,所述补偿模块用于获取各曝光时刻的条纹图像,所述条纹图像基于扫描目标场景得到;对比模块用于根据所述条纹图像的相位值和预设相位值之间的对比结果,确定目标相位偏差均值;补偿模块用于根据各曝光时刻对应的时滞补偿值对所述目标相位偏差均值进行补偿处理,直至补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围。
11、本申请还提供一种成像设备,包括存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现上述的方法。
12、本申请还提供一种计算机可读存储介质,其上存储有程序指令,所述程序指令被处理器执行时实现上述的方法。
13、由上可知,本申请具有以下有益效果:根据各曝光时刻的条纹图像的相位值和预设相位值之间的对比结果,确定目标相位偏差均值,并通过各曝光时刻对应的时滞补偿值对目标相位偏差均值进行补偿处理,直至补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围,由此能够在目标范围进行曝光,使投影出来的条纹图像和预设的条纹图像更相近或者相同。
14、本公开的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本公开的实践而习得。
15、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种时滞补偿方法,其特征在于,所述方法包括:
2.根据权利要求1所述的时滞补偿方法,其特征在于,所述根据各曝光时刻对应的时滞补偿值对所述目标相位偏差均值进行补偿处理,直至补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围的步骤,包括:
3.根据权利要求2所述的时滞补偿方法,其特征在于,所述若所述目标相位偏差均值为负值,则根据各曝光时刻对应的时滞补偿值进行正向补偿,直至所述补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围的步骤,包括:
4.根据权利要求1所述的时滞补偿方法,其特征在于,所述根据所述曝光时刻的条纹图像的相位值和对应曝光时刻的预设相位值之间的对比结果,确定目标相位偏差均值的步骤,包括:
5.根据权利要求1所述的时滞补偿方法,其特征在于,在所述根据所述曝光时刻的条纹图像的相位值和预设相位值之间的对比结果,确定目标相位偏差均值的步骤之前,所述方法还包括:
6.根据权利要求1所述的时滞补偿方法,其特征在于,所述根据各曝光时刻对应的时滞补偿值对所述目标相位偏差均值进行补偿处理,直至补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围的步骤之前,所述方法还包括:
7.根据权利要求1所述的时滞补偿方法,其特征在于,在所述根据各曝光时刻对应的时滞补偿值对所述目标相位偏差均值进行补偿处理,直至补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围的步骤之前,所述方法还包括:
8.根据权利要求1所述的时滞补偿方法,其特征在于,所述获取各曝光时刻的条纹图像的步骤,包括:
9.一种成像系统,其特征在于,包括:
10.一种成像设备,其特征在于,包括存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现权利要求1至9任一项所述的方法。
11.一种计算机可读存储介质,其上存储有程序指令,其特征在于,所述程序指令被处理器执行时实现权利要求1至9任一项所述的方法。
技术总结
本申请涉及三维成像领域,具体公开了一种时滞补偿方法、成像系统、设备以及存储介质。该时滞补偿方法包括:获取各曝光时刻的条纹图像,条纹图像是基于扫描目标场景得到的;根据条纹图像的相位值和预设相位值之间的对比结果,确定目标相位偏差均值;根据各曝光时刻对应的时滞补偿值对目标相位偏差均值进行补偿处理,直至补偿后的目标相位偏差均值隶属于对应曝光时刻的目标范围。由此能够在目标范围进行曝光,使投影出来的条纹图像和预设的条纹图像更相近或者相同。
技术研发人员:马灼明,周城东,李辉
受保护的技术使用者:深圳市如本科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!