一种新能源水下机器人远程作业监控方法及系统与流程
本发明涉及新能源智能运维管理领域,具体为一种新能源水下机器人远程作业监控方法及系统。
背景技术:
1、水下机器人是一种能在水下自如移动,具有视觉和感知系统,利用机械臂或其他工具,通过遥控或自主操作,代替或辅助人完成水下作业任务的装置。
2、当前移动网络技术的快速发展,4g/5g信号已经覆盖了我国大部分近海地区,并且基本上各个风场都会有5g基站,移动网络通讯技术成熟可靠,并且成本低。目前新能源存在多个海上风场,现场风机需要进行清洗风机桩基附着物,检测焊缝,观察桩基等工作,由于以往作业是现场作业,作业数据仅在现场控制系统进行存储,运维中心人员无法查看历史作业数据情况,对作业相关专业数据进行有效回溯分析。
技术实现思路
1、为了克服上述现有技术存在的缺陷,本发明的目的在于提供一种新能源水下机器人远程作业监控方法及系统,以解决现有技术中新能源海上风场专业操作难度大,仅现场可操作,无法历史回溯的技术问题。
2、本发明是通过以下技术方案来实现:
3、一种新能源水下机器人远程作业监控方法,包括如下步骤:
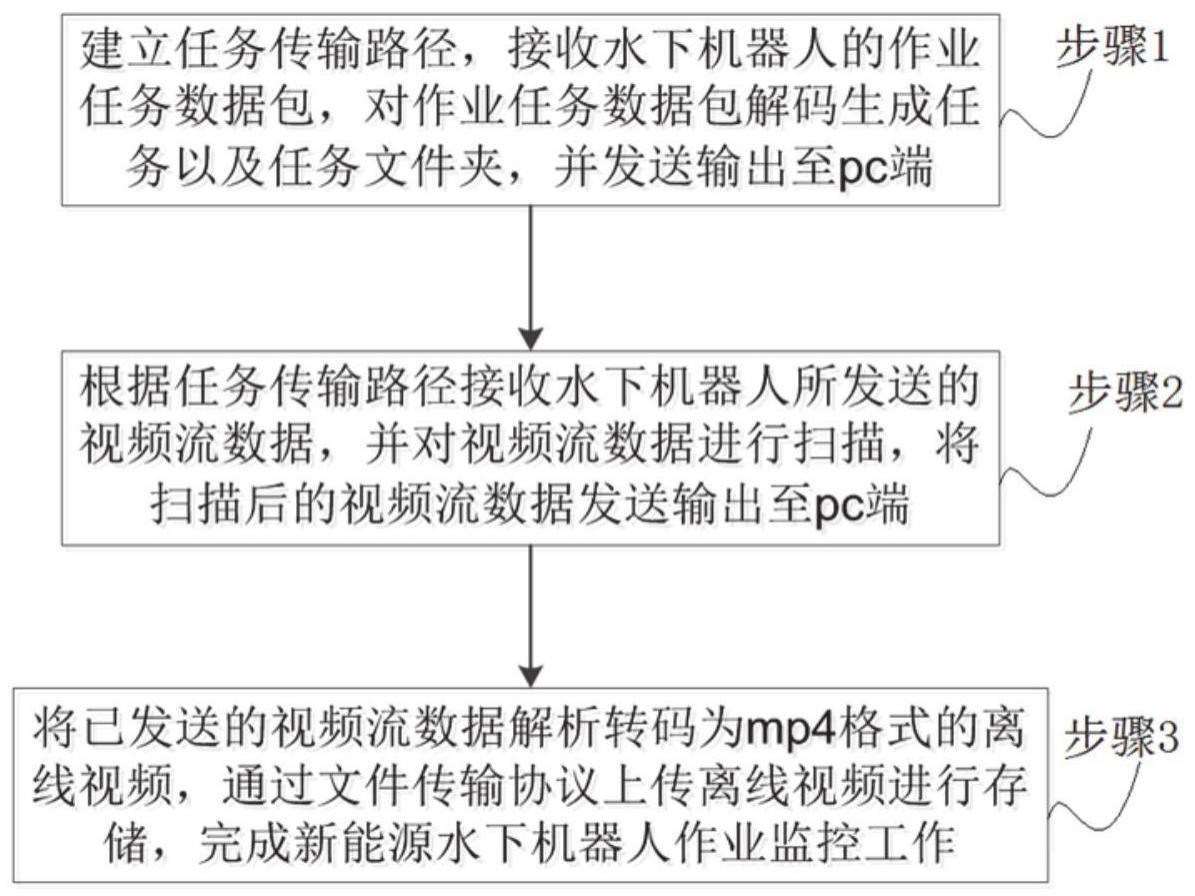
4、步骤1,建立任务传输路径,接收水下机器人的作业任务数据包,对作业任务数据包解码生成任务以及任务文件夹,并发送输出至pc端;
5、步骤2,根据任务传输路径接收水下机器人所发送的视频流数据,并对视频流数据进行扫描,将扫描后的视频流数据发送输出至pc端;
6、步骤3,将已发送的视频流数据解析转码为mp4格式的离线视频,通过文件传输协议上传离线视频进行存储,完成新能源水下机器人作业监控工作。
7、优选的,步骤1中,在任务传输路径的建立中,通过4g/5g信号与水下机器人进行信号传输,并通过tcp/ip协议进行socket长连接。
8、优选的,步骤1中,水下机器人的作业任务数据包包括姿态数据,深度数据,高度水平数据、倾斜度数据,航速数据,航向数据以及风场风机信息数据获取。
9、优选的,步骤1中,对作业任务数据包根据16进制编解码进行解析,生成任务以及任务文件夹,并建立websocket服务将所生成的任务以及任务文件夹发送输出至pc端。
10、优选的,步骤2中,所述视频流数据包括新能源水下机器人中摄像头以及声纳所生成rtsp协议的视频流数据。
11、进一步的,所述rtsp协议的视频流数据通过4g/5g信号接收,并在扫描后通过webrtc解析视频流,并将解析后的视频流发送到pc端展示。
12、优选的,步骤3中,文件传输协议上传离线视频进行存储的过程如下:
13、配置ftp文件上传路径,在水下机器人端配置ftp客户端,利用ftp文件上传路径与水下机器人端安装ftp客户端进行传输,在ftp文件上传路径上通过文件传输协议上传离线视频以及文件到ftp服务器下任务文件路径。
14、一种新能源水下机器人远程作业监控系统,基于上述所述的一种新能源水下机器人作业监控方法,包括
15、业务信息交互模块,用于建立任务传输路径,接收水下机器人的作业任务数据包,对作业任务数据包解码生成任务以及任务文件夹,并发送输出至pc端;
16、视频交互模块,用于根据任务传输路径接收水下机器人所发送的视频流数据,并对视频流数据进行扫描,将扫描后的视频流数据发送输出至pc端;
17、数据存储模块,用于将已发送的视频流数据解析转码为mp4格式的离线视频,通过文件传输协议上传离线视频进行存储,完成新能源水下机器人作业监控工作。
18、优选的,作业监控系统还包括第一数据解析模块,用于对作业任务数据包根据16进制编解码进行解析,生成任务以及任务文件夹,并建立websocket服务将所生成的任务以及任务文件夹发送输出至pc端。
19、优选的,视频交互模块包括数据扫描模块和第二数据解析模块;
20、数据扫描模块,用于rtsp协议的视频流数据通过4g/5g信号接收后扫描;
21、第二数据解析模块,用于rtsp协议的视频流数据在扫描后通过webrtc解析视频流。
22、与现有技术相比,本发明具有以下有益的技术效果:
23、本发明提供了一种新能源水下机器人远程作业监控方法,通过与水下机器人建立任务传输路径,并接收水下机器人根据任务传输路径所发送的作业任务数据包,根据所获得的作业任务数据包,实现可远程监控水下机器人的状态,并对水下机器人实现控制,收水下机器人所发送的视频流数据并对视频流数据进行扫描,将扫描后的视频流数据发送输出至pc端,可实时播放声纳以及摄像头视频;便于对水下机器人进行实时监测,将视频流数据解析转码为mp4格式的离线视频,通过文件传输协议上传离线视频进行存储,所存储的离线视频作为历史作业记录,便于历史作业回溯。
24、进一步的,采用rtsp实时流传输协议,传输数据到流媒体服务器,然后系统主机通过rtsp实时流传输协议从流媒体服务器获取视频流,保证了视频流的实时性,提高了对水下机器人的监控性能。
25、进一步的,将水下机器人端所配置ftp客户端以及现场pc端访问服务上传的离线摄像头以及声纳视频进行存储,通过ftp主机读取视频播放,使用ftp协议进行数据传输,便于了离线摄像头以及声纳视频的存储以及对水下机器人的历史作业回溯。
技术特征:
1.一种新能源水下机器人远程作业监控方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种新能源水下机器人远程作业监控方法,其特征在于,步骤1中,在任务传输路径的建立中,通过4g/5g信号与水下机器人进行信号传输,并通过tcp/ip协议进行socket长连接。
3.根据权利要求1所述的一种新能源水下机器人远程作业监控方法,其特征在于,步骤1中,水下机器人的作业任务数据包包括姿态数据,深度数据,高度水平数据、倾斜度数据,航速数据,航向数据以及风场风机信息数据获取。
4.根据权利要求1所述的一种新能源水下机器人远程作业监控方法,其特征在于,步骤1中,对作业任务数据包根据16进制编解码进行解析,生成任务以及任务文件夹,并建立websocket服务将所生成的任务以及任务文件夹发送输出至pc端。
5.根据权利要求1所述的一种新能源水下机器人远程作业监控方法,其特征在于,步骤2中,所述视频流数据包括新能源水下机器人中摄像头以及声纳所生成rtsp协议的视频流数据。
6.根据权利要求5所述的一种新能源水下机器人远程作业监控方法,其特征在于,所述rtsp协议的视频流数据通过4g/5g信号接收,并在扫描后通过webrtc解析视频流,并将解析后的视频流发送到pc端展示。
7.根据权利要求1所述的一种新能源水下机器人远程作业监控方法,其特征在于,步骤3中,文件传输协议上传离线视频进行存储的过程如下:
8.一种新能源水下机器人远程作业监控系统,基于权利要求1-7任一项所述的一种新能源水下机器人作业监控方法,其特征在于,包括
9.根据权利要求7所述的一种新能源水下机器人远程作业监控系统,其特征在于,所述作业监控系统还包括第一数据解析模块,用于对作业任务数据包根据16进制编解码进行解析,生成任务以及任务文件夹,并建立websocket服务将所生成的任务以及任务文件夹发送输出至pc端。
10.根据权利要求7所述的一种新能源水下机器人远程作业监控系统,其特征在于,所述视频交互模块包括数据扫描模块和第二数据解析模块;
技术总结
本发明涉及新能源智能运维管理领域,公开了一种新能源水下机器人远程作业监控方法及系统,通过与水下机器人建立任务传输路径,并接收水下机器人根据任务传输路径所发送的作业任务数据包,根据所获得的作业任务数据包,实现可远程监控水下机器人的状态,并对水下机器人实现控制,收水下机器人所发送的视频流数据并对视频流数据进行扫描,将扫描后的视频流数据发送输出至pc端,可实时播放声纳以及摄像头视频;便于对水下机器人进行实时监测,将视频流数据解析转码为mp4格式的离线视频,通过文件传输协议上传离线视频进行存储,所存储的离线视频作为历史作业记录,便于历史作业回溯。
技术研发人员:焦精伟,王昭,黄泷
受保护的技术使用者:西安热工研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!