作业援助方法、作业援助系统以及程序与流程
本发明涉及一种作业援助方法、作业援助系统以及程序。
背景技术:
1、近年来,农业信息化不断发展,当作业装置在田地进行作业之际,为了提高作业效率而开发出了一种进行援助的技术。
2、与上述相关联地,专利文献1公开了一种对卡车的运行进行远程控制的系统,其中,该卡车对用于收割农作物的作业装置所收割的作物进行搬运。
3、现有技术文献
4、专利文献
5、专利文献1:日本特许6767892号公报
技术实现思路
1、作业装置在多个田地进行作业的情况下,当在一个田地的作业结束时,作业装置需要向下一田地移动。然而,有时作业装置无法单独移动、或者在时间上或成本方面效率较低。因此,有时使用能够搬运作业装置的搬运装置来进行搬运。然而,例如在作业装置结束某个田地中的作业之后直至利用搬运装置开始被搬运为止的等待时间较长等等搬运装置的运营不够恰当的情况下,有可能导致作业效率降低。然而,在专利文献1的技术中,虽然能够使得作业装置收割的收割物的搬运呈现高效化,但是,无法使作业装置的搬运呈现高效化。
2、鉴于上述状况,本发明的目的之一在于,提高作业装置的搬运的效率。另一目的在于能够从以下的实施方式中掌握。
3、下面,使用了具体实施方式中采用的编号/符号,来说明用于解决课题的方法。这些编号/符号是为了表示权利要求的记载和具体实施方式之间的对应关系的一例,作为参考添加了括号而被附加的。据此,添加括号的描述说明不应该限定性地解释权利要求的范围。
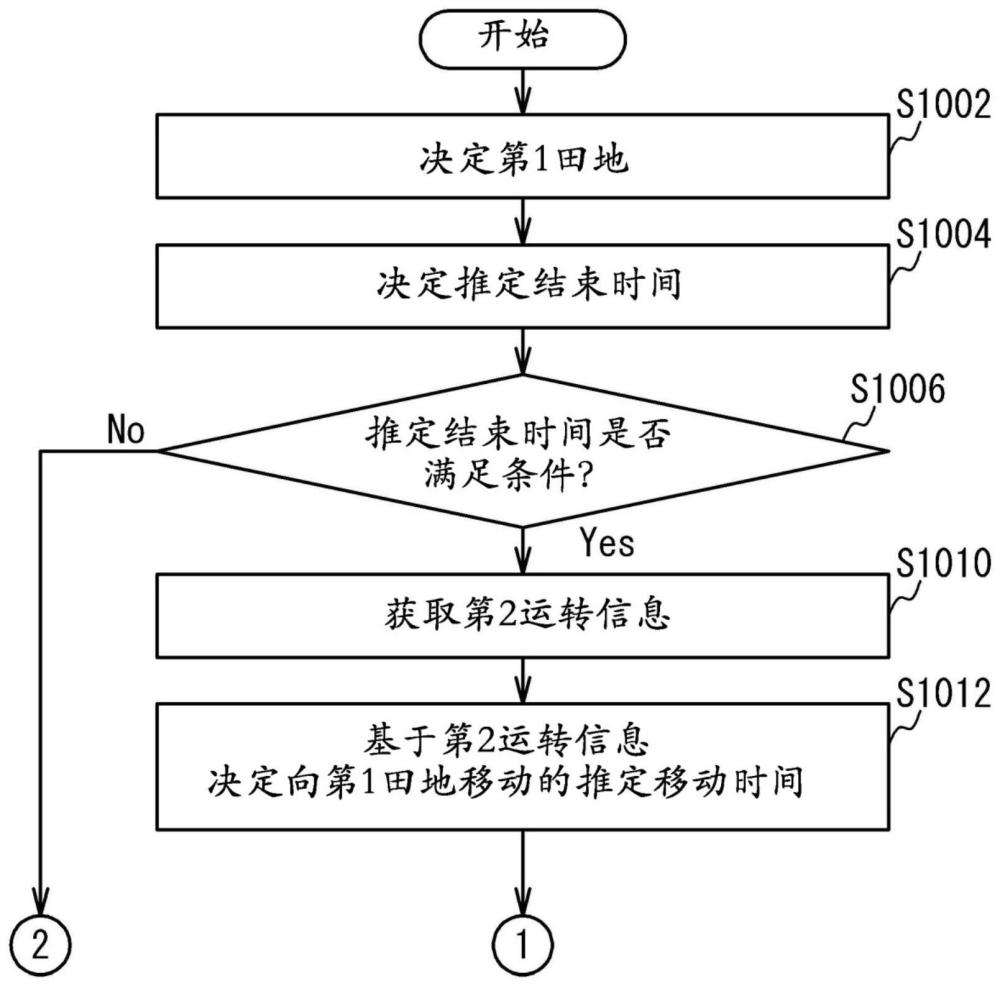
4、根据实施方式所涉及的作业援助方法包括如下步骤:基于表示在第1田地(a1)进行作业的作业装置(30)的位置以及时刻的第1运转信息(d1)、以及表示作业装置(30)进行作业的第1田地(a1)的田地信息(d2),来决定直至作业装置(30)结束在第1田地(a1)的作业为止的推定结束时间;以及基于推定结束时间,来输出表示搬运作业装置(30)的搬运装置(40a)应该朝向第1田地(a1)移动的移动指示信息。
5、其他实施方式所涉及的作业援助方法包括如下步骤:获取对作业装置(30)结束在第1田地(a1)的作业进行预告的预告信息;基于预告信息,来输出表示搬运作业装置(30)的搬运装置(40a)应该朝向第1田地(a1)移动的移动指示信息;基于为了将作业装置(30)从第1田地(a1)分别朝向作业装置(30)应该进行作业的多个田地(a)进行搬运所需要的推定搬运时间、以及作业装置(30)在多个田地(a)应该进行的作业量,来从多个田地(a)中决定第2田地(a2);以及输出表示搬运装置(40a)应该将作业装置(30)朝向所决定的第2田地(a2)进行搬运的搬运指示信息。
6、实施方式所涉及的作业援助系统具备:时间决定部(120),其基于表示在第1田地(a1)进行作业的作业装置(30)的位置以及时刻的第1运转信息(d1)、以及表示作业装置(30)进行作业的第1田地(a1)的田地信息(d2),来决定直至作业装置(30)结束在第1田地(a1)的作业为止的推定结束时间;以及移动输出部(140),其基于推定结束时间,来输出表示搬运作业装置(30)的搬运装置应该朝向第1田地(a1)移动的移动指示信息。
7、实施方式所涉及的程序使电脑执行如下处理:基于表示在第1田地(a1)进行作业的作业装置(30)的位置以及时刻的第1运转信息(d1)、以及表示作业装置(30)进行作业的第1田地(a1)的田地信息(d2),来决定直至作业装置结束(30)在第1田地(a1)的作业为止的推定结束时间的工序;以及基于推定结束时间,来输出表示搬运作业装置(30)的搬运装置应该朝向第1田地(a1)移动的移动指示信息。
8、发明效果
9、根据上述的实施方式,作业装置的搬运的效率得以提高。
技术特征:
1.一种作业援助方法,其特征在于,
2.根据权利要求1所述的作业援助方法,其特征在于,
3.根据权利要求2所述的作业援助方法,其特征在于,
4.根据权利要求3所述的作业援助方法,其特征在于,
5.根据权利要求1至4中任意一项所述的作业援助方法,其特征在于,
6.根据权利要求5所述的作业援助方法,其特征在于,
7.一种作业援助方法,其特征在于,
8.一种作业援助系统,其特征在于,
9.一种程序,其特征在于,
技术总结
本发明提供作业援助方法、作业援助系统以及程序,能够提高作业装置的搬运效率。作业援助方法包括如下步骤:基于表示在第1田地进行作业的作业装置的位置以及时刻的第1运转信息、以及表示作业装置进行作业的第1田地的田地信息,来决定直至作业装置结束在第1田地的作业为止的推定结束时间;以及基于推定结束时间,来输出表示搬运作业装置的搬运装置应该朝向第1田地移动的移动指示信息。
技术研发人员:小岛右资
受保护的技术使用者:洋马控股株式会社
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!