一种跟焦器及其控制方法与流程
本发明涉及跟焦器自动聚焦,具体涉及一种跟焦器及其控制方法。
背景技术:
1、跟焦器是单反相机拍摄电影或者视频的时候控制景深的必备单反视频配件,由于单反的优质镜头及可以调整的光圈,视频的虚化背景、突出主题得以实现,所以仅仅数万元的单反,拍摄出来的效果,可以与10万以上的专业摄像机媲美。
2、为确保跟焦器正常工作,必须要求物镜与待拍摄物始终处于对焦状态。但是,由于待拍摄物运动、环境变化等因素,跟焦器在工作时有可能发生物镜离焦的现象。跟焦器的作用是当待拍摄物出现离焦时,可及时自动控制物镜轴向移动,补偿离焦,使待拍摄物始终处于最佳焦点位置。这一过程也称为焦面跟踪。
3、传统的跟焦器进行控制对焦使用时,存在待拍摄物图像处理工作过于复杂的问题,使得跟焦器的聚焦控制系统的操作难度增大,不便于聚焦控制使用,如公开号为cn116233606a的专利“光斑自动跟焦装置及其方法”,通过四象限光电探测器来接收经样品表面反射的反射光束,四象限光电探测器具有较高的位移测量精度和较短的时间响应,可以根据四象限光电探测器计算出入射光斑的离焦量,进而可以根据离焦量生成相应的补偿控制信号并输出给控制物镜轴向运动的物镜压电位移器,从而能够实现运动状态下对光斑的实时跟焦,提高了光束对准的精确度;但在实际使用过程中存在以下缺陷:四象限光电探测器测量精确度较差,由电压差值生产补偿控制信号容易受到跟焦器自生供电系统影响,造成对焦精确性以及对焦时效性均较差,以使控制跟焦器进行对焦操作效果较差。
技术实现思路
1、本发明的目的在于提供一种跟焦器及其控制方法,用于解决现有技术中控制跟焦器进行对焦操作效果较差的问题。
2、本发明的目的可以通过以下技术方案实现:
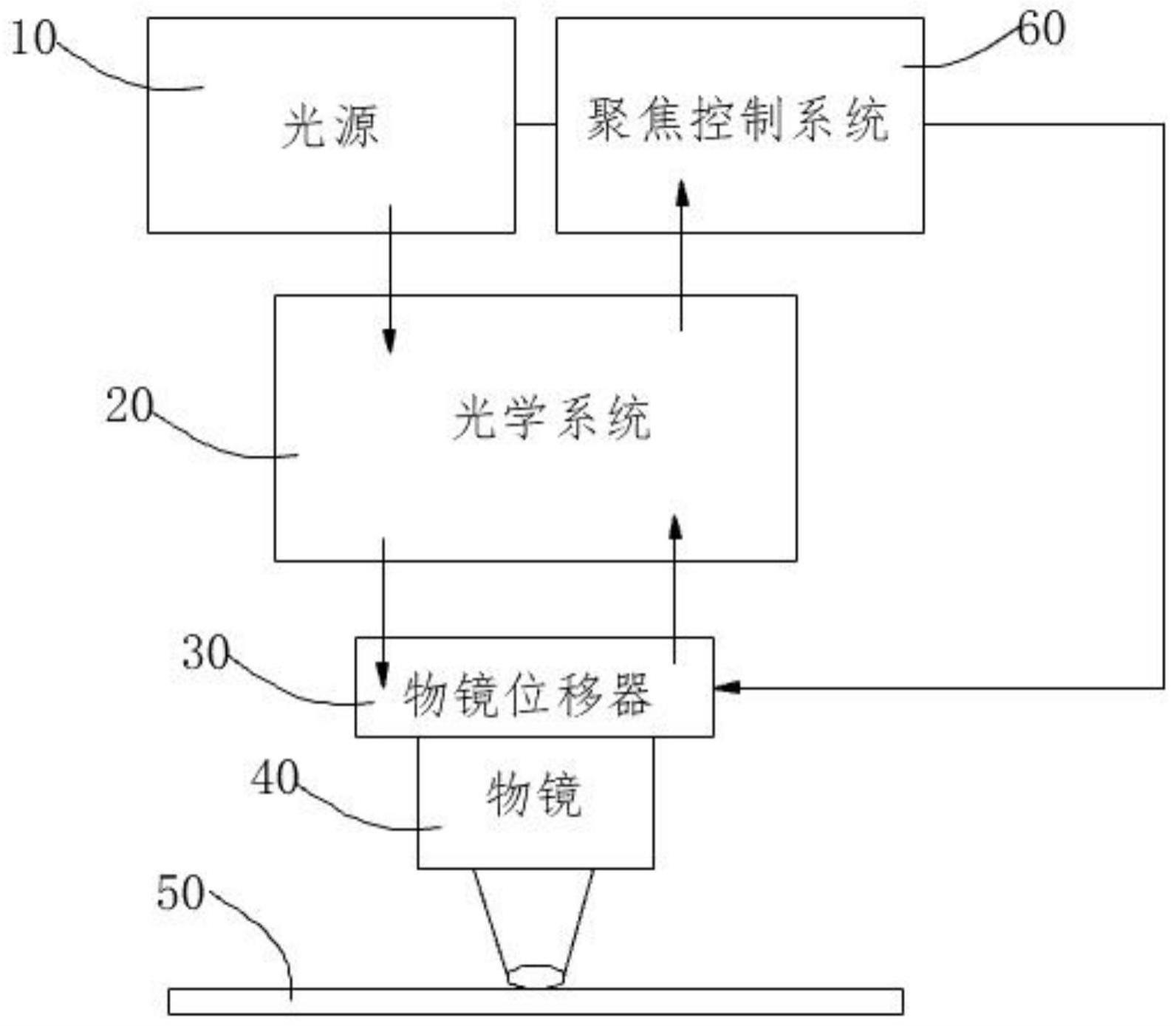
3、一种跟焦器,包括光源、光学系统、物镜、物镜位移器、聚焦控制系统,所述光源将入射光束依次经光学系统和物镜入射在待拍摄物表面,所述聚焦控制系统包括的图像采集模块用于获取所述待拍摄物表面反射光束形成的图像数据,所述聚焦控制系统包括的图像处理模块用于基于所述图像数据生成图像清晰度评价值,所述聚焦控制系统包括的神经网络训练模块用于基于所述图像清晰度评价值生成当前最佳焦点位置信息,并基于所述当前最佳焦点位置信息来生成控制信号给所述物镜位移器,所述物镜位移器用于基于所述聚焦系统生成的控制信号来控制物镜沿轴向移动至最佳焦点位置处。
4、作为本发明进一步的方案:所述图像采集模块获取所述待拍摄物表面反射光束形成的图像数据时,通过所述物镜位移器来控制物镜沿轴向移动,生成所述图像采集模块获取四个等距点位的图像数据。
5、作为本发明进一步的方案:基于生成所述图像采集模块获取四个等距点位的图像数据,基于所述四个等距点位的图像数据通过所述图像处理模块分别生成的清晰度评价值分别为x0,x1,x2,x3。
6、作为本发明进一步的方案:所述图像处理模块生成的清晰度评价值的计算公式为其中,获取的图像数据中的图像大小为y×z,t(m,n)为图像在(m,n)点位处的像素灰度值大小。
7、作为本发明进一步的方案:将生成的所述清晰度评价值x0,x1,x2,x3输入所述神经网络训练模块的输入端,所述神经网络训练模块的输出端生成当前最佳位置信息为q值,所述q值的点位坐标为当前最佳焦点位置信息。
8、一种跟焦器的控制方法,包括以下步骤:
9、s1、光源将入射光束依次经光学系统和物镜入射在待拍摄物表面;
10、s2、图像采集模块获取所述待拍摄物表面反射光束形成的图像数据;
11、s3、通过物镜位移器来控制物镜沿轴向移动,生成所述图像采集模块获取四个等距点位的图像数据;
12、s4、基于所述四个等距点位的图像数据,并由神经网络训练模块生成当前最佳焦点位置信息;
13、s5、基于所述神经网络训练模块生成当前最佳焦点位置信息,通过聚焦控制系统来控制物镜沿轴向移动至最佳焦点位置处。
14、作为本发明进一步的方案:步骤s4中基于所述四个等距点位的图像数据时,所述聚焦控制系统包括的图像处理模块用于基于所述图像数据生成图像清晰度评价值,将所述图像清晰度评价值输入所述神经网络训练模块的输入端。
15、本发明的跟焦器及控制方法至少能够取得以下有益技术效果:物镜位移器可以快速控制物镜沿轴向移动,以获取物镜处在不同点位的图像数据,不同点位的图像数据经图像处理模块进行计算,生成不同点位的图像清晰度评价值,不同点位的图像清晰度评价值可以作为神经网络训练模块的输入端,神经网络训练模块已存储拍摄点位数据集,从而可以快速生成预测当前最佳焦点位置信息,以使聚焦控制系统产生的控制信号带动物镜位移器动作,从而使得物镜快速响应沿轴向移动至最佳焦点位置处,从而能够实现运动状态下对待拍摄物的实时跟焦,提高了自动对焦的精确度。
技术特征:
1.一种跟焦器,其特征在于,包括光源(10)、光学系统(20)、物镜(40)、物镜位移器(30)、聚焦控制系统(60),所述光源(10)将入射光束依次经光学系统(20)和物镜(40)入射在待拍摄物表面,所述聚焦控制系统(60)包括的图像采集模块(61)用于获取所述待拍摄物表面反射光束形成的图像数据,所述聚焦控制系统(60)包括的图像处理模块(62)用于基于所述图像数据生成图像清晰度评价值,所述聚焦控制系统(60)包括的神经网络训练模块(63)用于基于所述图像清晰度评价值生成当前最佳焦点位置信息,并基于所述当前最佳焦点位置信息来生成控制信号给所述物镜位移器(30),所述物镜位移器(30)用于基于所述聚焦系统生成的控制信号来控制物镜(40)沿轴向移动至最佳焦点位置处。
2.根据权利要求1所述的一种跟焦器,其特征在于,所述图像采集模块(61)获取所述待拍摄物表面反射光束形成的图像数据时,通过所述物镜位移器(30)来控制物镜(40)沿轴向移动,生成所述图像采集模块(61)获取四个等距点位的图像数据。
3.根据权利要求2所述的一种跟焦器,其特征在于,基于生成所述图像采集模块(61)获取四个等距点位的图像数据,基于所述四个等距点位的图像数据通过所述图像处理模块(62)分别生成的清晰度评价值分别为x0,x1,x2,x3。
4.根据权利要求3所述的一种跟焦器,其特征在于,所述图像处理模块(62)生成的清晰度评价值的计算公式为其中,获取的图像数据中的图像大小为y×z,t(m,n)为图像在(m,n)点位处的像素灰度值大小。
5.根据权利要求3所述的一种跟焦器,其特征在于,将生成的所述清晰度评价值x0,x1,x2,x3输入所述神经网络训练模块(63)的输入端,所述神经网络训练模块(63)的输出端生成当前最佳位置信息为q值,所述q值的点位坐标为当前最佳焦点位置信息。
6.根据权利要求1所述的一种跟焦器的控制方法,其特征在于,包括以下步骤:
7.根据权利要求6所述的一种跟焦器的控制方法,其特征在于,步骤s4中基于所述四个等距点位的图像数据时,所述聚焦控制系统(60)包括的图像处理模块(62)用于基于所述图像数据生成图像清晰度评价值,将所述图像清晰度评价值输入所述神经网络训练模块(63)的输入端。
技术总结
本发明公开了一种跟焦器,包括光源,光源将入射光束依次经光学系统和物镜入射在待拍摄物表面,聚焦控制系统包括的图像采集模块用于获取待拍摄物表面反射光束形成的图像数据,聚焦控制系统包括的图像处理模块用于基于图像数据生成图像清晰度评价值,聚焦控制系统包括的神经网络训练模块用于基于图像清晰度评价值生成当前最佳焦点位置信息,物镜位移器用于基于聚焦系统生成的控制信号来控制物镜沿轴向移动至最佳焦点位置处。通过神经网络训练模块可以快速生成预测当前最佳焦点位置信息,从而使得物镜快速响应沿轴向移动至最佳焦点位置处,从而能够实现运动状态下对待拍摄物的实时跟焦,提高了自动对焦的精确度。
技术研发人员:黎金海
受保护的技术使用者:广州呗呗科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!