一种用于隧道的多相机光照补偿方法与流程
本发明涉及光照补偿,特别是一种用于隧道的多相机光照补偿方法。
背景技术:
1、目前在隧道病害检测场景下,主要依靠人工巡检隧道病害,作业效率较低,而基于轨道车自动化采集隧道表观图像数据,对图像进行拼接生成地图,然后对病害进行自动识别,生成病害分布一张图,可大幅提高隧道病害的检出效率。轨道车一般搭载多个固定安装的线阵相机,并使用激光进行打光来采集隧道表观图像数据,由于环境光照条件不同以及不同激光的打光效果存在差异,导致相同相机采集的图像存在亮度不均匀以及不同相机采集的图像存在明显的亮度差异现象。
2、目前常用的光照补偿方法,第一种方法是选出一些图像作为模板,然后计算灰度均值,再根据灰度均值对其他图像的灰度进行线性拉伸;第二种方法是对模板图像进行灰度直方图均衡化,再以模板图像的灰度直方图为基准对其他图像进行直方图匹配。
3、上述光照补偿方法在轨道车采集的隧道表观数据上并不适用,第一是相同相机的图像亮度不均匀,常常呈现图像左右两边亮暗分明的现象,灰度线性拉伸后会使亮部过亮,因此仅适用于亮度均匀的图像;第二是直方图均衡化和直方图匹配虽然能取得更好的效果,但计算量大,难以适用于数据量庞大的工程。
技术实现思路
1、本发明的目的在于克服现有技术的缺点,提供一种用于隧道的多相机光照补偿方法。
2、本发明的目的通过以下技术方案来实现:一种用于隧道的多相机光照补偿方法,包括以下步骤:
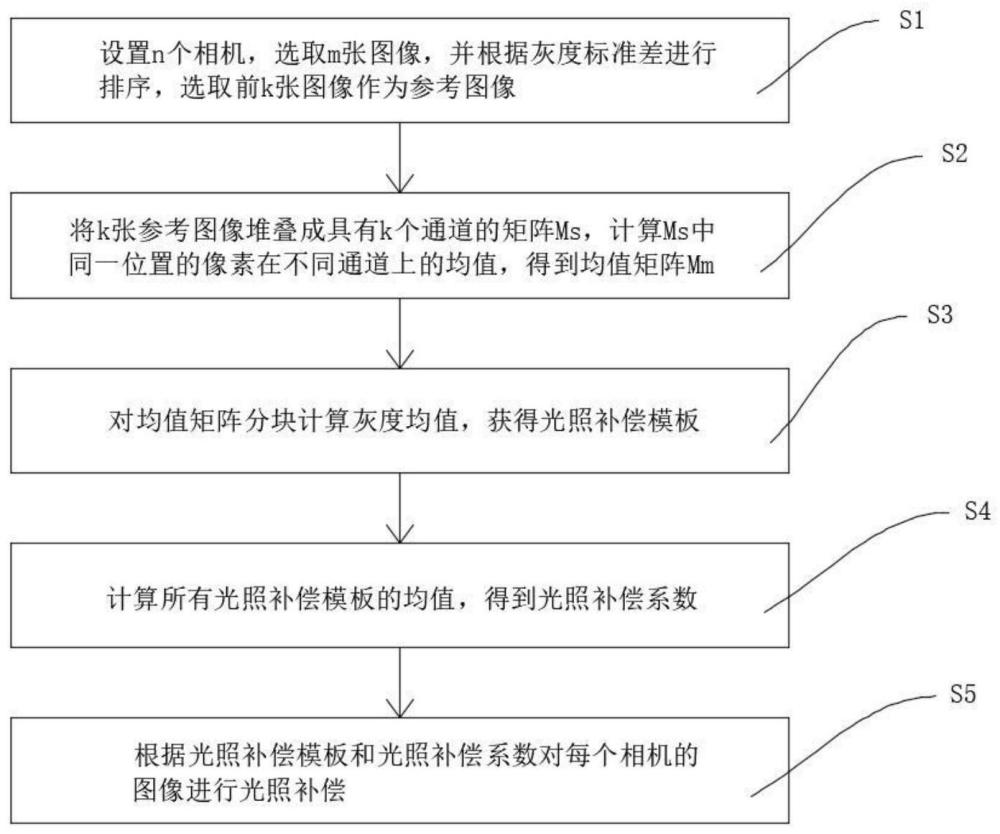
3、s1:设置n个相机,选取m张图像,并根据灰度标准差进行排序,选取前k张图像作为参考图像;
4、s2:将k张参考图像堆叠成具有k个通道的矩阵ms,计算ms中同一位置的像素在不同通道上的均值,得到均值矩阵mm;
5、s3:对均值矩阵分块计算灰度均值,获得光照补偿模板;
6、s4:计算所有光照补偿模板的均值,得到光照补偿系数;
7、s5:根据光照补偿模板和光照补偿系数对每个相机的图像进行光照补偿。
8、优选的,步骤s1中,还包括以下步骤:
9、s11:设有n个相机,对于第i(i=1,2,...,n)个相机所拍摄的图像,图像宽高均为(w,h),选取m张图像,计算出第j(j=1,2,..,m)幅图像的灰度标准差σj,
10、
11、其中,为第j幅图像的像素值,μj为像素均值;
12、s12:根据灰度标准差按升序排序。
13、优选的,步骤s11中,当单个相机拍摄的图像数量小于m,则选择全部图像。
14、优选的,步骤s2中,ms矩阵维度为(k,w,h),获得维度为(w,h)的均值矩阵mm,计算mm中像素值p(x,y),
15、
16、其中,为ms第l(l=1,2,..,k)个通道上坐标为(x,y)的像素值。
17、优选的,步骤s3中,还包括以下步骤:
18、s31:设分块大小b=256,创建大小为(wb,hb)的分块均值矩阵其中wb=ceil(w/b),hb=ceil(h/b),在均值矩阵mm上按分块计算灰度均值,每一块的均值填入相应位置,计算中像素值
19、
20、其中,mean为对矩阵求均值运算,m'm为在mm矩阵中的分块矩阵;
21、s32:当在中,坐标为(x',y')处对应于mm矩阵的范围为:
22、
23、s33:将分块均值矩阵由(wb,hb)上采样到(w,h)大小,得到此相机图像的光照补偿模板
24、优选的,步骤s4中,通过累加所有光照补偿模板均值计算均值作为不同相机之间的光照补偿系数β,计算公式为:
25、
26、其中,mean为对矩阵求均值运算,为第i个相机的光照补偿模板,n为相机数量。
27、优选的,步骤s5中,根据光照补偿模板和光照补偿系数对每个相机的图像进行光照补偿的计算公式为:
28、
29、其中,ii为第i个相机的图像,i'i为光照补偿后的图像。
30、本发明具有以下优点:在隧道多相机采集表观图像的场景下,相比较于常用的光照补偿方法,本发明通过选取少量参考图像计算出光照补偿模板和光照补偿系数,然后对图像进行光照补偿,从而解决了图像亮度不均匀以及不同相机之间的亮度差异的问题,当后续需要对图像进行光照补偿时,只需要利用光照补偿模板和补偿系数进行简单运算即可,具有计算量小的特点。
技术特征:
1.一种用于隧道的多相机光照补偿方法,其特征在于:包括以下步骤:
2.根据权利要求l所述的用于隧道的多相机光照补偿方法,其特征在于:所述步骤s1中,还包括以下步骤:
3.根据权利要求2所述的用于隧道的多相机光照补偿方法,其特征在于:所述步骤s11中,当单个相机拍摄的图像数量小于m,则选择全部图像。
4.根据权利要求3所述的用于隧道的多相机光照补偿方法,其特征在于:所述步骤s2中,ms矩阵维度为(k,w,h),获得维度为(w,h)的均值矩阵mm,计算mm中像素值p(x,y),
5.根据权利要求4所述的用于隧道的多相机光照补偿方法,其特征在于:所述步骤s3中,还包括以下步骤:
6.根据权利要求5所述的用于隧道的多相机光照补偿方法,其特征在于:所述步骤s4中,通过累加所有光照补偿模板均值计算均值作为不同相机之间的光照补偿系数β,计算公式为:
7.根据权利要求6所述的用于隧道的多相机光照补偿方法,其特征在于:所述步骤s5中,根据光照补偿模板和光照补偿系数对每个相机的图像进行光照补偿的计算公式为:
技术总结
本发明公开了一种用于隧道的多相机光照补偿方法,S1:设置n个相机,选取m张图像,并进行排序,选取前k张图像作为参考图像;S2:将k张参考图像堆叠成具有k个通道的矩阵M<subgt;s</subgt;,计算M<subgt;s</subgt;中同一位置的像素在不同通道上的均值,得到均值矩阵M<subgt;m</subgt;;S3:分块计算灰度均值,获得光照补偿模板;S4:计算光照补偿模板的均值,得到光照补偿系数;S5:根据光照补偿模板和光照补偿系数对每个相机的图像进行光照补偿。选取少量参考图像计算出光照补偿模板和光照补偿系数,对图像进行光照补偿,解决了图像亮度不均匀以及不同相机之间的亮度差异问题,当后续需要对图像进行光照补偿时,只需要利用光照补偿模板和补偿系数进行简单运算即可,计算量小。
技术研发人员:贾鸿顺,钟新然,陈茂林,曾焕焕,付钺,桂仲成
受保护的技术使用者:上海圭目机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!