一种红外辅助的蓝牙AoA定位方法、系统、介质与流程
本发明涉及室内定位,尤其是涉及一种红外辅助的蓝牙aoa定位方法、系统、介质。
背景技术:
1、伴随无线通信技术和众多智能产品应用的发展,室内定位技术的市场需求逐渐扩大。
2、蓝牙aoa定位技术具有高精度、低功耗、低成本和小型化的优势,在高精度室内定位中具有良好的应用前景。但是,由于定位基站的部署精度需求导致部署过程复杂且耗时,同时室内环境下的多径效应以及wifi等信号的干扰会降低定位精度。
3、中国专利申请公开号cn106249266a公开了一种基于北斗与室内定位相结合的人员定位系统,包括移动终端、固定终端、监控终端;所述移动终端包括蓝牙单元、超声波发射模块、北斗定位单元、数据处理模块、无线通讯模块;所述固定终端包括蓝牙天线、超声波接收模块、红外测距模块、微处理器、无线发射模块;所述监控终端包括无线接收模块、中央处理器、显示模块。
4、上述申请通过蓝牙天线、超声波接收模块、红外测距模块对室内工作人员的坐标进行提取,并综合三者的定位信息形成最终的室内定位信息,从而与北斗定位系统进行结合,实现室内外定位的无缝切换。但是,在室内场景中,当物体遮挡时红外测距会受到影响,并不能有效结合以实现室内定位。
5、因此,当前缺少一种蓝牙aoa定位方法、系统、介质,以提高室内场景下的定位准确度。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种红外辅助的蓝牙aoa定位方法、系统、介质,提高室内场景下的定位准确度。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明的一个方面,提供了一种红外辅助的蓝牙aoa定位方法,应用于服务端,包括如下步骤:
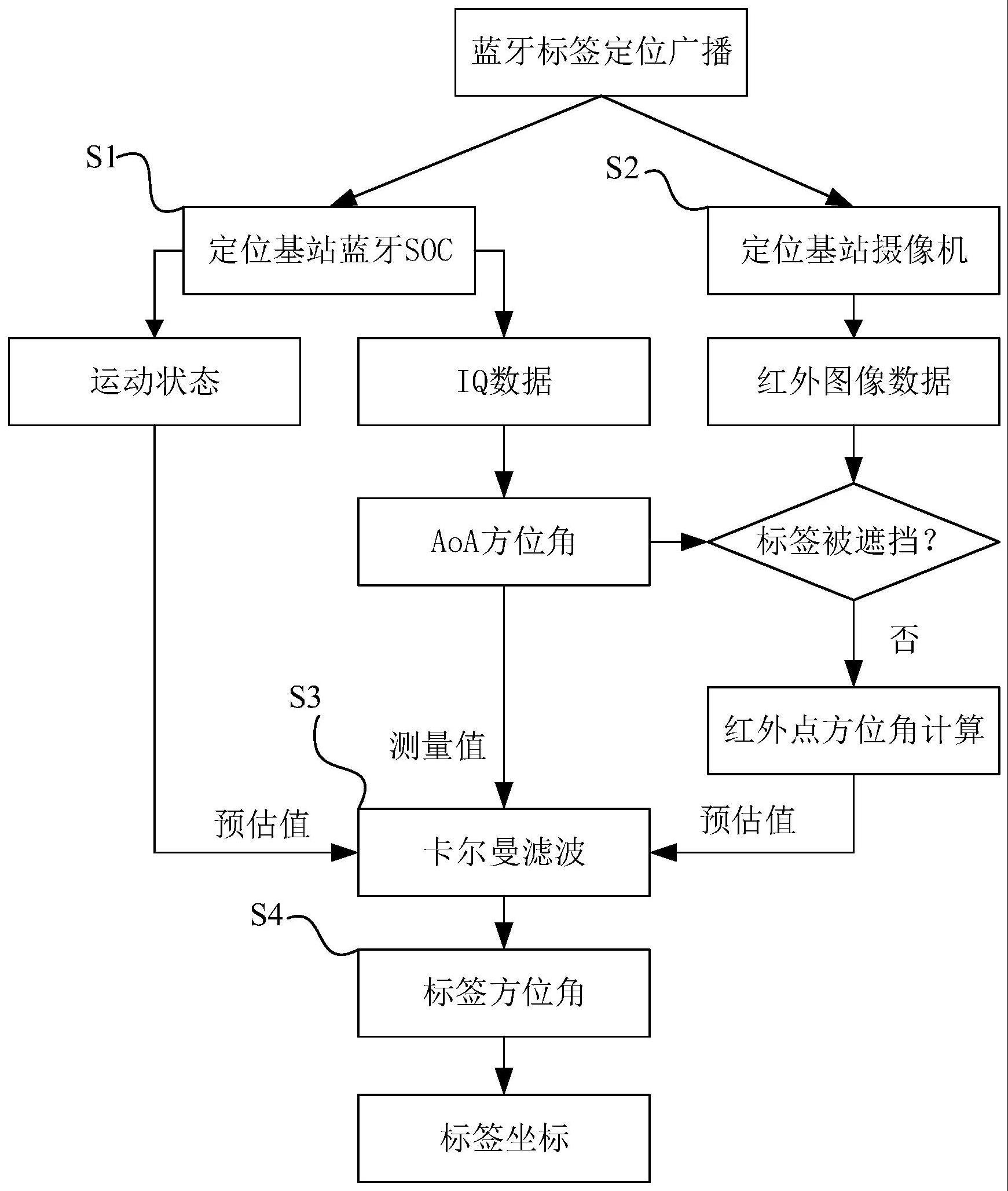
4、建立与至少一个定位基站的连接,通过aoa定位得到蓝牙标签的时间戳以及aoa方位角测量值;
5、判断所述时间戳对应时刻下所述蓝牙标签是否被遮挡,若否,通过对所述蓝牙标签进行红外测量得到aoa方位角估计值,若是,则基于上一时刻aoa定位结果得到aoa方位角预估值;
6、将所述aoa方位角测量值和所述aoa方位角预估值输入卡尔曼滤波方程中,得到aoa方位角计算值,基于所述aoa方向角计算值实现所述蓝牙标签的定位。
7、作为优选的技术方案,所述的基于上一时刻aoa定位结果得到aoa方位角预估值的过程包括如下步骤:
8、基于所述时间戳对应时刻和上一时刻的aoa方位角测量值,以所述蓝牙标签的运动状态,通过预测得到aoa方位角预估值。
9、作为优选的技术方案,在定位之前,还包括:
10、获取设置在定位基站处的摄像头拍摄的包括预设标定物的图像,基于所述图像获取各个定位基站间的相对位置信息;
11、获取至少一个定位基站的坐标、高度和方向信息,基于所述各个定位基站间的相对位置信息,得到各个定位基站的坐标、高度和方向。
12、作为优选的技术方案,还包括:
13、若针对同一个蓝牙标签,同一时刻有多个定位基站计算得到的多个aoa方位角计算值,则将加权平均的结果作为该时刻下的aoa方位角计算值。
14、作为优选的技术方案,还包括:
15、储存得到的aoa方位角计算值。
16、作为优选的技术方案,所述的通过aoa定位得到蓝牙标签的时间戳以及aoa方位角测量值包括如下步骤:
17、通过接收蓝牙标签发送的定位广播,获取时间戳、广播信息和相位数据,基于所述广播信息获取标签的运动状态,基于所述相位数据获取aoa方位角测量值。
18、作为优选的技术方案,所述的通过红外测量得到aoa方位角估计值包括如下步骤:
19、通过插值法获得aoa方位角估计值。
20、作为优选的技术方案,基于上一时刻aoa定位结果得到aoa方位角预估值包括如下步骤:
21、基于时间戳对应时刻以及上一时刻的aoa方位角测量值,以及蓝牙标签的运动状态,获取aoa方位角预估值。
22、本发明的另一个方面,提供了一种红外辅助的蓝牙aoa定位系统,包括:
23、蓝牙标签,包括第一蓝牙芯片和第一红外led;
24、蓝牙aoa定位基站,包括第二蓝牙芯片、与所述第二蓝牙芯片连接的aoa阵列天线以及至少一个摄像机;
25、服务器,与所述蓝牙aoa定位基站连接,其内置有上所述红外辅助的蓝牙aoa定位方法的指令;
26、定位板,所述定位板上设置有水平仪、多个第二红外led以及用于调整定位板高度的支撑脚。
27、本发明的另一个方面,提供了一种计算机可读存储介质,包括供电子设备的一个或多个处理器执行的一个或多个程序,所述一个或多个程序包括用于执行上述红外辅助的蓝牙aoa定位方法的指令。
28、与现有技术相比,本发明具有以下优点:
29、(1)提高定位准确度:本发明在蓝牙aoa定位的基础上,引入了红外定位辅助aoa方位角的确定,当时间戳对应时刻下蓝牙标签未被遮挡时,则利用红外测量的结果测算aoa方位角的预估值,否则基于上一时刻的蓝牙aoa测量结果推算aoa方位角的预估值,结合时间戳时刻的蓝牙aoa测量值,利用卡尔曼滤波计算最终值,以此实现蓝牙标签的定位。本申请通过引入红外定位辅助aoa方位角的确定,提高了室内定位精度。
30、(2)便于快速部署:本发明在定位之前,基于设置在定位基站处的摄像头拍摄的包括预设标定物(即定位板)的图像,以及至少一个定位基站的坐标、高度和方向信息,即可得到各个定位基站的坐标、高度和方向,定位基站可以快速部署。
技术特征:
1.一种红外辅助的蓝牙aoa定位方法,其特征在于,应用于服务端,包括如下步骤:
2.根据权利要求1所述的一种红外辅助的蓝牙aoa定位方法,其特征在于,所述的基于上一时刻aoa定位结果得到aoa方位角预估值的过程包括如下步骤:
3.根据权利要求1所述的一种红外辅助的蓝牙aoa定位方法,其特征在于,在定位之前,还包括:
4.根据权利要求1所述的一种红外辅助的蓝牙aoa定位方法,其特征在于,还包括:
5.根据权利要求1所述的一种红外辅助的蓝牙aoa定位方法,其特征在于,还包括:
6.根据权利要求1所述的一种红外辅助的蓝牙aoa定位方法,其特征在于,所述的通过aoa定位得到蓝牙标签的时间戳以及aoa方位角测量值包括如下步骤:
7.根据权利要求1所述的一种红外辅助的蓝牙aoa定位方法,其特征在于,所述的通过红外测量得到aoa方位角估计值包括如下步骤:
8.根据权利要求1所述的一种红外辅助的蓝牙aoa定位方法,其特征在于,基于上一时刻aoa定位结果得到aoa方位角预估值包括如下步骤:
9.一种红外辅助的蓝牙aoa定位系统,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,包括供电子设备的一个或多个处理器执行的一个或多个程序,所述一个或多个程序包括用于执行如权利要求1-7任一所述红外辅助的蓝牙aoa定位方法的指令。
技术总结
本发明涉及一种红外辅助的蓝牙AoA定位方法、系统、介质,方法包括如下步骤:建立与至少一个定位基站的连接,通过AoA定位得到蓝牙标签的时间戳以及AoA方位角测量值;判断所述时间戳对应时刻下所述蓝牙标签是否被遮挡,若否,通过对所述蓝牙标签进行红外测量得到AoA方位角估计值,若是,则基于上一时刻AoA定位结果得到AoA方位角预估值;将所述AoA方位角测量值和所述AoA方位角预估值输入卡尔曼滤波方程中,得到AoA方位角计算值,基于所述AoA方向角计算值实现所述蓝牙标签的定位。与现有技术相比,本发明通过红外辅助降低定位基站的部署难度,提高部署效率,并提高AoA定位精度。
技术研发人员:马之远,张鹏程,仇正豪,方逸洲
受保护的技术使用者:上海仪电(集团)有限公司中央研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!