一种面向通信定位一体化的三维精密室内定位系统的制作方法
本发明涉及室内移动定位领域,尤其是涉及基于机器学习的可见光接收信号强度参数估计和高精度定位系统,适应于感知信号辅助毫米波及太赫兹通信探测一体化系统。
背景技术:
1、人类80%的活动都是在室内进行,如何在室内能够高效率、高精确度的接收到信息,并准确的将用户位置反馈给数据中心是一项关键的技术。由于5g中所用的毫米波与太赫兹波段的波长短、波束宽度窄,毫米波及太赫兹波通信对移动用户的三维精确定位提出了更高的要求。然而,传统的波束跟踪方法通过发送训练符号来跟踪用户设备的位置,这可能会降低系统的吞吐量和效率。所以,如何帮助毫米波或太赫兹基站得到用户的准确位置,从而使其波束赋形过程高效完成是一项值得研究的课题。
2、目前有几种室内定位技术可以应用,包括全球定位系统、蓝牙、无线局域网、近场通信和可见光通信。在室内定位方案中,gps的定位覆盖范围最广,定位精度最差。无线局域网和蓝牙都是无线传输,可能会受到其他无线载波的干扰和多径效应,导致定位精度差。近场通信只在近场工作,因此它的覆盖范围有限。与之相比较而言,可见光定位是近年来发展起来的一种很有前途的无线定位技术,具有成本低、人眼安全、抗电磁干扰、易操作等性能优势,且方便与室内照明系统集成。
技术实现思路
1、本发明所解决的技术问题在于利用基于机器学习方法的室内可见光通信,提高b5g和6g中毫米波或太赫兹波在三维空间波束赋形过程中用户设备的定位精度。
2、为解决上述技术问题,本发明采用如下技术方案:
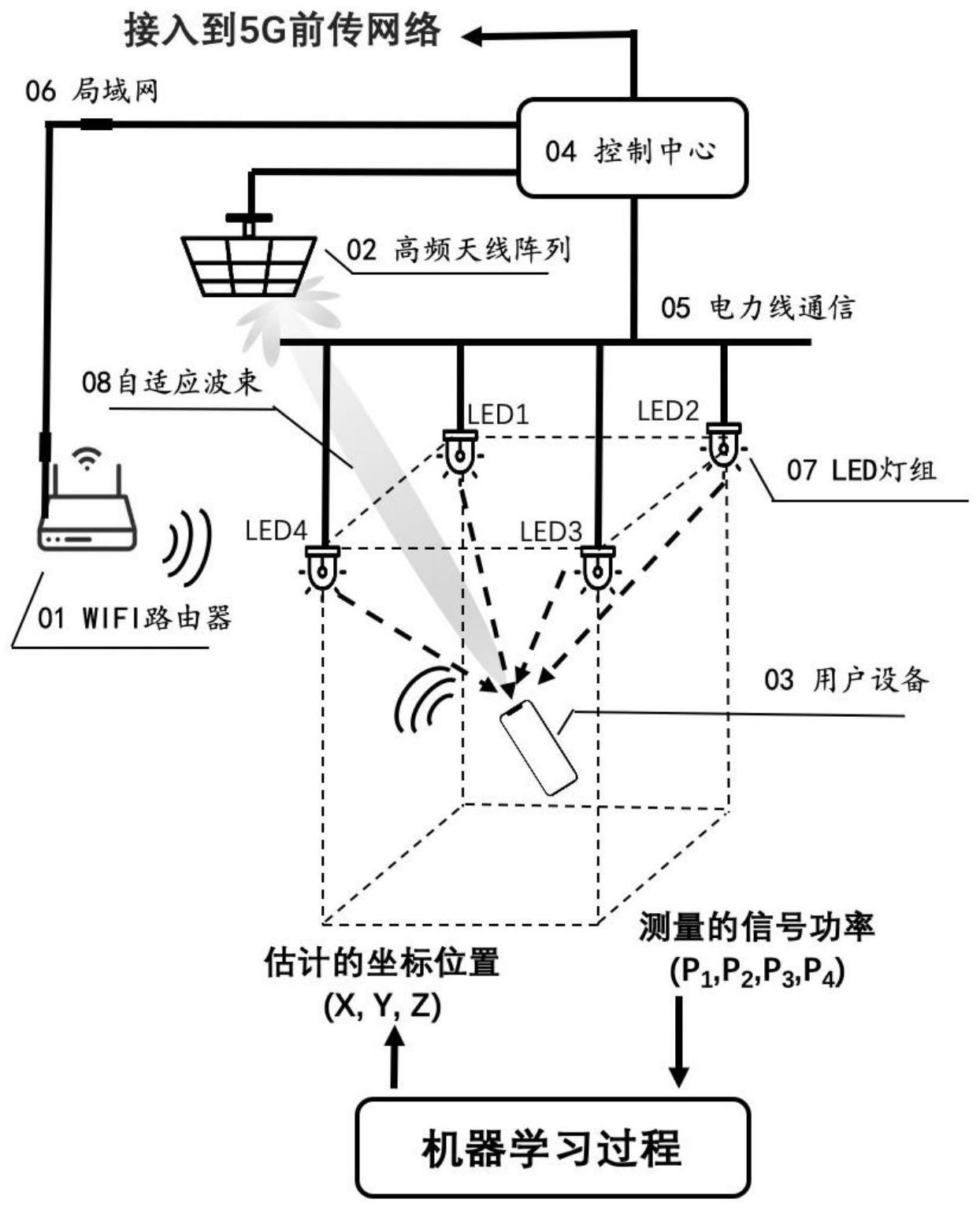
3、一种面向通信定位一体化的三维精密室内定位系统,包括无线路由器,控制中心、用户设备、高频天线阵列和led灯组;
4、无线路由器用于用户设备接入,进行用户设备与控制中心的信息传输,并提供用户设备初步的粗略位置;
5、控制中心用于通过无线路由器中用户设备的接入进行粗略定位,并在接收到用户设备的高数据速率传输请求后激活led灯组;还用于根据用户设备传输的光信息利用机器学习算法进行定位;
6、led灯组用于在激活后发射光信号;其中,led灯组包括至少三个led灯;
7、用户设备用于通过无线路由器向控制中心请求高数据速率传输,并接收led灯组的光信号,将光信号传输至控制中心;其中,用户设备的数量大于等于1;
8、高频天线阵列用于将控制中心计算的用户设备信息在所计算的方向波束传输到对应的用户设备。
9、进一步的,每个led灯具有不同载波频率,任意三个不同频率的led灯作为一个定位单元。
10、进一步的,led灯组包括三个以上led灯时,控制中心根据用户设备传输的光信息利用机器学习算法进行定位的具体过程为:
11、控制中心将用户设备接收的不同led灯的光功率强度进行光电转换,并进行归一化处理;将处理后的数据作为训练数据集,输入第一阶段的人工神经网络,得到相应的定位单元的标签类别,将标签对应的单元类别的功率输入第二阶段的人工神经网络,输出为相应位置的三维坐标;训练完成后得到接收功率与定位坐标对应的模型。
12、进一步的,led灯组包括三个led灯时,控制中心根据用户设备传输的光信息利用机器学习算法进行定位的具体过程为:
13、控制中心将用户设备接收的不同led灯的光功率强度进行光电转换,并进行归一化处理;将处理后的数据作为训练数据集,输入第二阶段的人工神经网络,输出为相应位置的三维坐标;训练完成后得到接收功率与定位坐标对应的模型。
14、进一步的,led灯组包括三个以上led灯时,第一阶段的人工神经网络包括输入层、隐藏层和输出层;其中,输入层的神经元节点为定位区域的各个参考点位置接收到的各个led灯的光信号强度p1、p2、…pn,n>3;隐藏层的层数和神经元节点数量根据参考点的复杂度和神经网络目标输出结果进行调整,调整的标准是在训练速度设定范围内,使各个参考点判定到的单元标签类别误差最小,重复训练多次直到达到预先设定的训练目标;输出层具有个神经元节点,代表输出的个单元标签类别;
15、第二阶段的人工神经网络包括输入层、隐藏层和输出层;其中输入层为九个神经元节点,对应第一阶段人工神经网络输出得到的相应单元标签类别中三个led灯的光信号强度进行处理所得,分别为p1、p2、p3、p1p2、p2p3、p1p3、p12、p22、p32;隐藏层的层数和神经元节点数量根据参考点的复杂度和神经网络目标输出结果进行调整,调整的标准是在训练速度设定范围内,使各个参考点处的平均定位误差最小,重复训练多次直到达到所需定位精度的训练目标;输出层具有三个神经元节点,分别代表用户设备位置的x、y、z坐标。
16、进一步的,在得到用户设备的精确坐标后,控制中心计算出用户的方位,并将相应的波束定向发射给用户设备。
17、进一步的,在用户设备移动过程中,定位系统持续跟踪用户设备对位置进行更新,控制中心得到用户设备精确坐标后,控制高频天线阵列对用户设备进行追踪发射波束。
18、本发明相比现有技术的优点为:
19、(1)相对于其他技术,本发明系统具有稳定的传输链路,且不受电磁干扰的影响,此外还具有成本低、用眼安全以及可以与建筑照明系统兼容的优点。
20、(2)本发明联合了wifi和可见光定位技术,可以兼具两者优势,实现了对室内建筑较大范围、高精确度的定位。
21、(3)相对于传统的平面定位,本发明可以实现对用户设备高度的定位,实现了三维多层次的定位,具有更多的应用。
22、(4)本发明采用基于机器学习人工神经网络算法的定位系统,能够提供高精度的定位服务。
技术特征:
1.一种面向通信定位一体化的三维精密室内定位系统,其特征在于,包括无线路由器,控制中心、用户设备、高频天线阵列和led灯组;
2.根据权利要求1所述的一种面向通定一体化的三维精密室内定位系统,其特征在于,每个led灯具有不同载波频率,任意三个不同频率的led灯作为一个定位单元。
3.根据权利要求2所述的一种面向通定一体化的三维精密室内定位系统,其特征在于,led灯组包括三个以上led灯时,控制中心根据用户设备传输的光信息利用机器学习算法进行定位的具体过程为:
4.根据权利要求3所述的一种面向通定一体化的三维精密室内定位系统,其特征在于,led灯组包括三个led灯时,控制中心根据用户设备传输的光信息利用机器学习算法进行定位的具体过程为:
5.根据权利要求4所述的一种面向通定一体化的三维精密室内定位系统,其特征在于,led灯组包括三个以上led灯时,第一阶段的人工神经网络包括输入层、隐藏层和输出层;其中,输入层的神经元节点为定位区域的各个参考点位置接收到的各个led灯的光信号强度p1、p2、…pn,n>3;隐藏层的层数和神经元节点数量根据参考点的复杂度和神经网络目标输出结果进行调整,调整的标准是在训练速度设定范围内,使各个参考点判定到的单元标签类别误差最小,重复训练多次直到达到预先设定的训练目标;输出层具有个神经元节点,代表输出的个单元标签类别;
6.根据权利要求5所述的一种面向通定一体化的三维精密室内定位系统,其特征在于,在得到用户设备的精确坐标后,控制中心计算出用户的方位,并将相应的波束定向发射给用户设备。
7.根据权利要求5所述的一种面向通定一体化的三维精密室内定位系统,其特征在于,在用户设备移动过程中,定位系统持续跟踪用户设备对位置进行更新,控制中心得到用户设备精确坐标后,控制高频天线阵列对用户设备进行追踪发射波束。
技术总结
本发明公开了一种基于机器学习算法的面向通信定位一体化的三维精密室内定位系统。本发明涉及室内移动定位领域,适应于感知信号辅助毫米波及太赫兹通信探测一体化系统,包括无线路由器,控制中心、用户设备、高频天线阵列和LED灯组。通过建筑内WIFI的连接,控制中心可以先得到用户在建筑中大概位置,之后激活LED灯组来提供精确的三维定位服务。之后,MMW阵列可以向所计算的方向上波束赋形来建立到用户设备的MMW定向传输。本发明利用发光二极管实现的三维精密可见光定位系统具有成本低、人眼安全、抗电磁干扰、已操作等性能优势,且方便与室内照明系统集成。与室内WIFI等定位技术协同工作,可实现对室内建筑较大覆盖范围的三维定位,机器学习算法的应用可以有效提高定位的精度。
技术研发人员:李依桐,宋瑞良,刘宁,刘军,张博
受保护的技术使用者:中国电子科技集团公司第五十四研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!