一种面向多点采集串行计算任务的多无人机协作部署方法
本发明涉及流程优化领域,尤其涉及一种面向多点采集串行计算任务的多无人机协作部署方法。
背景技术:
1、传统的任务通常为通信任务或单个计算任务的数据包转发或计算,任务与任务之间没有联系。
2、传统的单无人机多点数据采集,需要依次经过每个有任务的传感器节点进行采集和计算,该方案不仅十分耗时,同时对无人机的能量消耗也很大,在子任务数量过大或者子任务计算量较大的场景时是不合适的。
3、传统的多无人机多点数据采集,每个无人机分别到对应的传感器节点进行采集,其以数据采集为目标,最大化无人机采集性能,在每个无人机节点采集完数据后按照串行计算关系依次计算并传输结果,但该方案没有考虑采集和计算的整体优化,对无人机和传感器的能耗仍消耗过大。
技术实现思路
1、本发明提供了一种面向多点采集串行计算任务的多无人机协作部署方法,解决了现有无人机多点数据采集场景下的设备能耗高的问题。
2、一种面向多点采集串行计算任务的多无人机协作部署方法,包括:
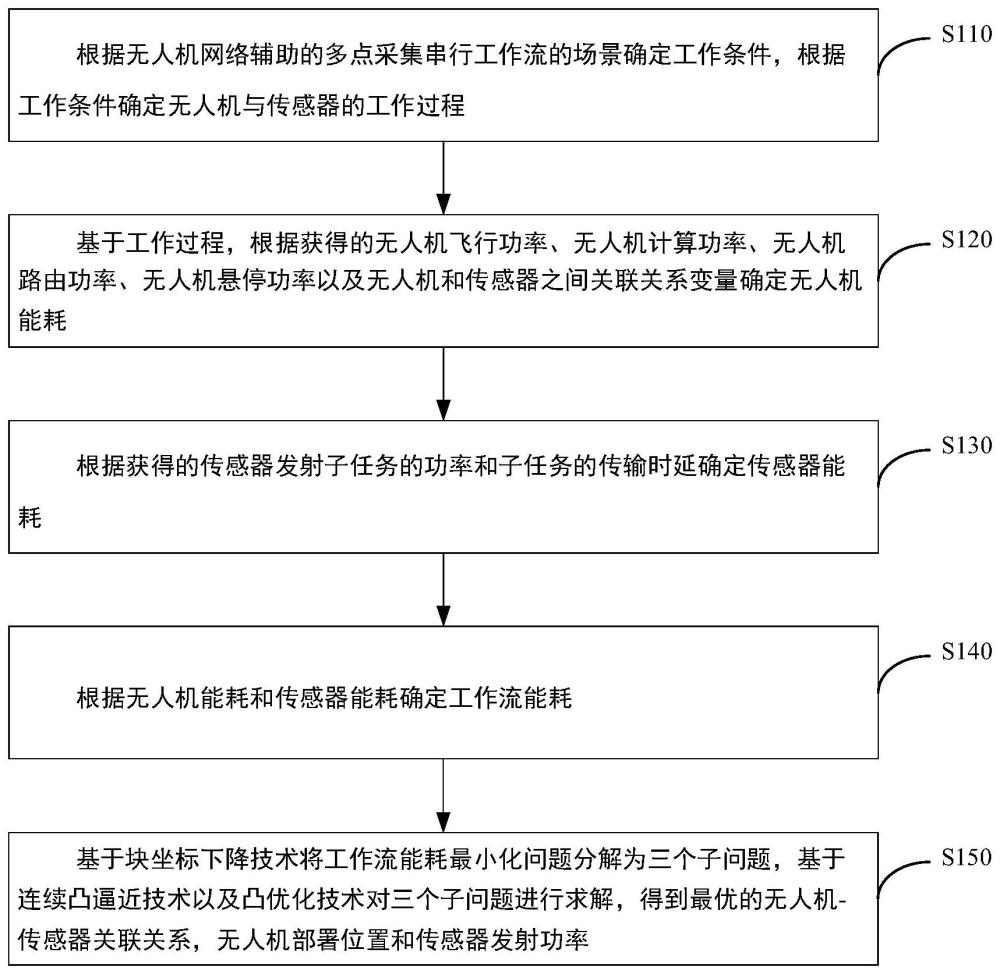
3、根据无人机网络辅助的多点采集串行工作流的场景确定工作条件,根据所述工作条件确定无人机与传感器的工作过程;
4、基于所述工作过程,根据获得的无人机飞行功率、无人机计算功率、无人机路由功率、无人机悬停功率以及无人机和传感器之间关联关系变量确定无人机能耗;
5、根据获得的传感器发射子任务的功率和子任务的传输时延确定传感器能耗;
6、根据无人机能耗和传感器能耗确定工作流能耗;
7、基于块坐标下降技术将所述工作流能耗最小化问题分解为三个子问题,基于连续凸逼近技术以及凸优化技术对所述三个子问题进行求解,得到最优的无人机-传感器关联关系,无人机部署位置和传感器发射功率。
8、在本发明的一种实施例中,根据无人机网络辅助的多点采集串行工作流的场景确定工作条件,包括:根据不同传感器产生的子任务构成多个串行工作流;获取传感器与子任务的映射关系,将无人机与传感器之间的关联作为变量;无人机接收来自传感器的子任务;对于串行工作流中的子任务有不同的时延约束,基于串行工作流中的子任务先后依赖关系,确定不同子任务对应的无人机部署时间和传感器任务上传时间。
9、在本发明的一种实施例中,所述确定无人机与传感器的工作过程,具体包括:每个无人机根据就近原则关联产生子任务的传感器,根据其对应的子任务先后依赖关系构成串行工作流;无人机根据所述串行工作流中各个子任务的先后依赖关系完成所述串行工作流的处理。
10、在本发明的一种实施例中,所述对于不同的子任务,确定其对应的无人机部署时间和传感器任务上传时间的时延约束,包括:
11、处理串行工作流中第一个子任务的无人机时延为:
12、
13、其中,无人机为接收第一个子任务的无人机,为该无人机时延,为该无人机的飞行时延,为该无人机接收传感器数据的传输时延,为获取到第一个子任务的总时延约束。
14、在本发明的一种实施例中,所述对于不同的子任务,确定其对应的无人机部署时间和传感器任务上传时间的时延约束,包括:
15、处理串行工作流中中间子任务j的无人机的时延为:
16、
17、其中,无人机为接收中间子任务的无人机,j≥2,为中间子任务j的时延,为该无人机的飞行时延,为该无人机接收传感器数据的传输时延,为该无人机获取到中间子任务的时延约束,为接收中间子任务的前一个子任务的时延,为当前子任务之前的无人机接收传感器数据的计算时延,为当前子任务之前的无人传输计算结果的路由时延。
18、在本发明的一种实施例中,所述对于不同的子任务,确定其对应的无人机部署时间和传感器任务上传时间的时延,包括:
19、处理串行工作流中最后一个子任务的无人机的时延为:
20、
21、其中,无人机为接收最后一个子任务的无人机,为最后一个子任务的无人机的时延,为该无人机的飞行时延,为该无人机的接收传感器数据的传输时延,为无人机获取到最后一个子任务的时延约束,为接收中间子任务的前一个子任务的无人机的总时延,为除接收最后一个子任务的无人机外的每个无人机的计算时延,为除当前子任务的无人机外的每个无人机的路由时延。
22、在本发明的一种实施例中,所述方法还包括:无人机和传感器间采用概率los信道进行子任务的传输,无人机之间采用los信道进行子任务结果的路由;一个工作周期内一个无人机只能服务一个传感器且一个传感器只能把任务卸载到一个无人机上。
23、一种面向多点采集串行计算任务的多无人机协作部署装置,包括:
24、工作过程建立模块,用于根据无人机网络辅助的多点采集串行工作流的场景确定工作条件,根据所述工作条件确定无人机与传感器的工作过程;
25、无人机能耗建立模块,用于基于所述工作过程,根据获得的无人机飞行功率、无人机计算功率、无人机路由功率、无人机悬停功率以及无人机和传感器之间关联关系变量确定无人机能耗;
26、传感器能耗建立模块,用于根据获得的传感器发射子任务的功率和子任务的传输时延确定传感器能耗;
27、工作流能耗建立模块,用于根据无人机能耗和传感器能耗确定工作流能耗;
28、求解模块,用于基于块坐标下降技术将所述工作流能耗最小化问题分解为三个子问题,基于连续凸逼近技术以及凸优化技术对所述三个子问题进行求解,得到最优的无人机-传感器关联关系,无人机部署位置和传感器发射功率。
29、一种面向多点采集串行计算任务的多无人机协作部署设备,包括:
30、至少一个处理器;以及,
31、与所述至少一个处理器通过总线通信连接的存储器;其中,
32、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被执行,以实现如上述各实施例任一项所述的方法。
33、一种非易失性存储介质,存储有计算机可执行指令,所述计算机可执行指令由处理器执行,以实现如上述各实施例任一项所述的方法。
34、本发明提供了一种面向多点采集串行计算任务的多无人机协作部署方法,至少包括以下有益效果:本方法通过对算力网络时代的工作模式之一,即串行工作流进行建模,同时对无人机网络辅助的计算卸载场景进行建模,将其抽象为了一个以子任务时延、工作流时延、无人机防碰撞等为约束,以无人机传感器关联关系,无人机部署位置和传感器发射功率为变量,以最小化完成所有工作流能耗为目标的数学优化问题,基于对目标函数的优化求解,采用块坐标下降、连续凸逼近技术、凸优化等技术求解出各个变量的最优解,使得工作流的能耗大大降低,进而降低无人机和传感器的能耗,由此本方法更能够适应于子任务数量过大或者子任务计算量较大的场景,实用性增高。
技术特征:
1.一种面向多点采集串行计算任务的多无人机协作部署方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,根据无人机网络辅助的多点采集串行工作流的场景确定工作条件,包括:
3.根据权利要求1所述的方法,其特征在于,所述确定无人机与传感器的工作过程,具体包括:
4.根据权利要求2所述的方法,其特征在于,所述对于不同的子任务,确定其对应的无人机部署时间和传感器任务上传时间的时延,包括:
5.根据权利要求2所述的方法,其特征在于,所述对于不同的子任务,确定其对应的无人机部署时间和传感器任务上传时间的时延,包括:
6.根据权利要求2所述的方法,其特征在于,所述对于不同的子任务,确定其对应的无人机部署时间和传感器任务上传时间的时延,包括:
7.根据权利要求3所述的方法,其特征在于,所述方法还包括:无人机和传感器间采用概率los信道进行子任务的传输,无人机之间采用los信道进行子任务结果的路由;
8.一种面向多点采集串行计算任务的多无人机协作部署装置,其特征在于,包括:
9.一种面向多点采集串行计算任务的多无人机协作部署设备,其特征在于,包括:
10.一种非易失性存储介质,存储有计算机可执行指令,其特征在于,所述计算机可执行指令由处理器执行,以实现如权利要求1-7任一项所述的方法。
技术总结
本发明公开了一种面向多点采集串行计算任务的多无人机协作部署方法,该方法包括:根据无人机网络辅助的多点采集串行工作流的场景确定工作条件,根据工作条件确定无人机与传感器的工作过程;基于工作过程,根据获得的无人机飞行功率、无人机计算功率、无人机路由功率、无人机悬停功率以及无人机和传感器之间关联关系变量确定无人机能耗;根据获得的传感器发射子任务的功率和子任务的传输时延确定传感器能耗;根据无人机能耗和传感器能耗确定工作流能耗;基于块坐标下降技术将工作流能耗最小化问题分解为三个子问题,基于连续凸逼近技术以及凸优化技术对三个子问题进行求解,得到最优的无人机‑传感器关联关系,无人机部署位置和传感器发射功率。
技术研发人员:林刚,徐荐雷,曹龚,韩伟
受保护的技术使用者:运城职业技术大学
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!