图像处理参数寻优方法、装置、电子设备及存储介质与流程
本发明涉及计算机,尤其涉及一种图像处理参数寻优方法、装置、电子设备及存储介质。
背景技术:
1、智能汽车的先进驾驶辅助系统和自动驾驶系统都依赖于车辆能准确感知周围的环境,因此,图像信号处理(image signal process,isp)技术在自动驾驶或辅助驾驶中占据关键地位。通过将车载摄像头获取的环境图像输入视觉感知算法以实现对图像信号的处理。视觉感知算法大多使用机器视觉及深度学习,这些模型都是黑盒模型,因此需要在进行视觉识别前对原始图像数据进行图像处理,图像处理直接影响视觉感知模型的输出效率,在调试过程中,需要isp工程师不断修改大量的isp参数,调试不同调教方案,调教的结果取决于isp工程师视觉偏好。因此,现有图像处理参数寻优过程效率低,浪费人力物力,并且寻优结果准确性难以客观衡量,导致视觉感知算法模型性能不能得到有效保障。
技术实现思路
1、本发明提供一种图像处理参数寻优方法、装置、电子设备及存储介质,用以解决现有的图像处理参数寻优方法寻优过程效率低,寻优结果准确性难以客观衡量,导致视觉感知算法模型输出效果难以保障的缺陷。
2、本发明提供一种图像处理参数寻优方法,包括:
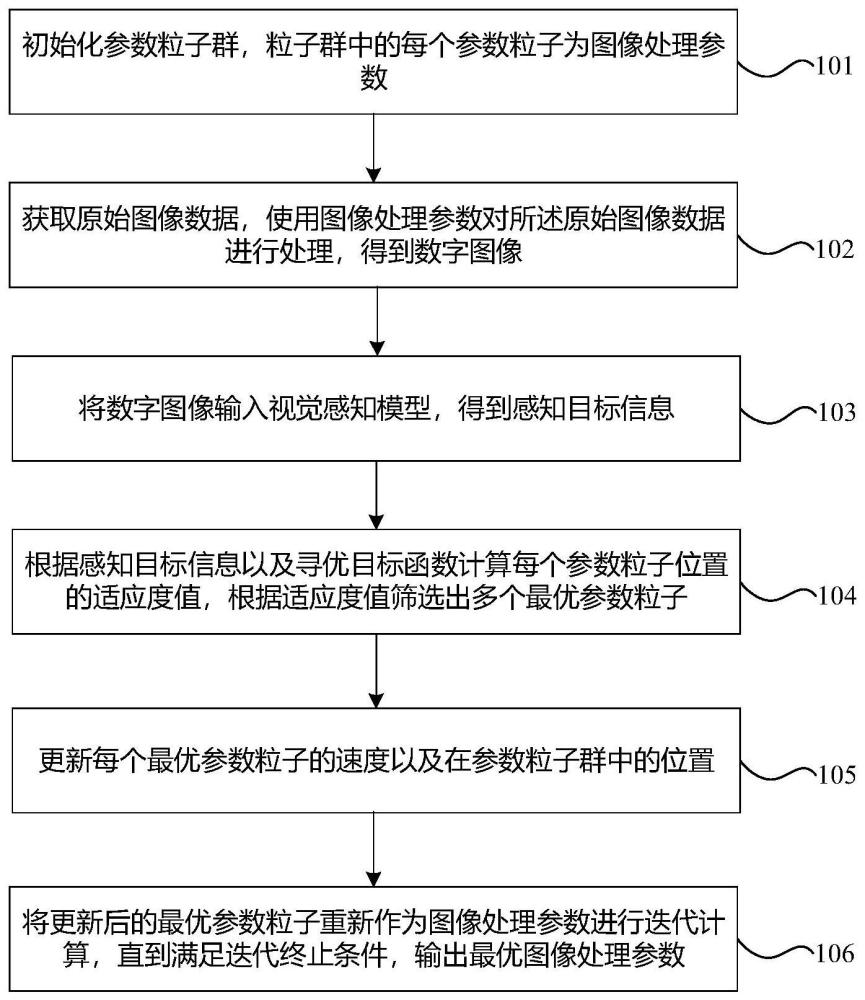
3、初始化参数粒子群,所述粒子群中的每个参数粒子为图像处理参数;
4、获取原始图像数据,使用所述图像处理参数对所述原始图像数据进行处理,得到数字图像;
5、将所述数字图像输入视觉感知模型,得到感知目标信息;
6、根据感知目标信息以及寻优目标函数计算每个参数粒子位置的适应度值,根据所述适应度值筛选出多个最优参数粒子;
7、更新每个最优参数粒子的速度以及在所述参数粒子群中的位置;
8、将更新后的最优参数粒子重新作为图像处理参数进行迭代计算,直到满足迭代终止条件,输出最优图像处理参数。
9、根据本发明提供的一种图像处理参数寻优方法,所述感知目标信息为自动驾驶场景中障碍目标信息,寻优目标函数的构建方法包括:
10、计算多个性能指标的性能综合评分;
11、根据障碍目标与自车之间的不同距离区间对应的性能综合评分构建寻优目标函数。
12、根据本发明提供的一种图像处理参数寻优方法,所述寻优目标函数为多个距离区间对应的性能综合评分加权求和,其中,各个性能综合评分的权重根据不同距离对应的精度需求确定。
13、根据本发明提供的一种图像处理参数寻优方法,所述计算多个性能指标的性能综合评分根据模型输出精度、真阳评价指标计算得到,所述真阳评价指标包括平均平移误差、平均尺度误差、平均方向误差、平均速度误差和平均属性误差中的一种或多种。
14、根据本发明提供的一种图像处理参数寻优方法,所述根据寻优目标函数计算每个参数粒子位置的适应度值,包括:
15、适应度值f=maxz(t),其中,z(t)为寻优目标函数。
16、根据本发明提供的一种图像处理参数寻优方法,所述更新每个最优参数粒子速度以及在所述参数粒子群中的位置,包括:
17、将每个参数粒子的适应度值作为每个参数粒子的个体极值,以及,将每个距离区间中所有参数粒子的最优适应度值作为群体极值;
18、根据所述个体极值和群体极值更新每个参数粒子的位置和速度。
19、根据本发明提供的一种图像处理参数寻优方法,还包括:
20、在每次迭代过程中,重复使用所述原始图像数据对所述图像处理参数进行优化。
21、本发明还提供一种图像处理参数寻优装置,包括:
22、初始化模块,用于初始化参数粒子群,所述粒子群中的每个参数粒子为图像处理参数;
23、处理模块,用于获取原始图像数据,使用所述图像处理参数对所述原始图像数据进行处理,得到数字图像;
24、输入模块,用于将所述数字图像输入视觉感知模型,得到感知目标信息;
25、筛选模块,用于根据感知目标信息以及寻优目标函数计算每个参数粒子位置的适应度值,根据所述适应度值筛选出多个最优参数粒子;
26、更新模块,用于更新每个最优参数粒子的速度以及在所述参数粒子群中的位置;
27、迭代模块,用于将更新后的最优参数粒子重新作为图像处理参数进行迭代计算,直到满足迭代终止条件,输出最优图像处理参数。
28、本发明还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现上述任一项所述的图像处理参数寻优方法。
29、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述的图像处理参数寻优方法。
30、本发明提供的图像处理参数寻优方法、装置、电子设备及存储介质,通过初始化参数粒子群,粒子群中的每个参数粒子为图像处理参数;获取原始图像数据,使用图像处理参数对所述原始图像数据进行处理,得到数字图像;将数字图像输入视觉感知模型,得到感知目标信息;根据感知目标信息以及寻优目标函数计算每个参数粒子位置的适应度值,根据适应度值筛选出多个最优参数粒子;更新每个最优参数粒子的速度以及在参数粒子群中的位置;将更新后的最优参数粒子重新作为图像处理参数进行迭代计算,直到满足迭代终止条件,输出最优图像处理参数,通过粒子群算法实现图像处理参数自动寻优,提高参数寻优效率,节省人力物力,比较通过寻优目标函数代替传统的认为主观经验,实现寻优结果客观评价,从而提高寻优结果准确性,从而提升视觉感知算法模型输出效果。
技术特征:
1.一种图像处理参数寻优方法,其特征在于,包括:
2.根据权利要求1所述的图像处理参数寻优方法,其特征在于,所述感知目标信息为自动驾驶场景中障碍目标信息,寻优目标函数的构建方法包括:
3.根据权利要求2所述的图像处理参数寻优方法,其特征在于,所述寻优目标函数为多个距离区间对应的性能综合评分加权求和,其中,各个性能综合评分的权重根据不同距离对应的精度需求确定。
4.根据权利要求2所述的图像处理参数寻优方法,其特征在于,所述计算多个性能指标的性能综合评分根据模型输出精度、真阳评价指标计算得到,所述真阳评价指标包括平均平移误差、平均尺度误差、平均方向误差、平均速度误差和平均属性误差中的一种或多种。
5.根据权利要求1所述的图像处理参数寻优方法,其特征在于,所述根据寻优目标函数计算每个参数粒子位置的适应度值,包括:
6.根据权利要求1所述的图像处理参数寻优方法,其特征在于,所述更新每个最优参数粒子的速度以及在所述参数粒子群中的位置,包括:
7.根据权利要求1所述的图像处理参数寻优方法,其特征在于,还包括:
8.一种图像处理参数寻优装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所述的图像处理参数寻优方法。
10.一种非暂态可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现如权利要求1至7任一项所述的图像处理参数寻优方法。
技术总结
本发明提供一种图像处理参数寻优方法、装置、电子设备及存储介质,包括:获取原始图像数据,使用图像处理参数对原始图像数据进行处理得到数字图像;将数字图像输入视觉感知模型,得到感知目标信息;根据感知目标信息以及寻优目标函数计算每个参数粒子位置的适应度值,根据适应度值筛选出多个最优参数粒子;更新每个最优参数粒子的速度以及在参数粒子群中的位置;将最优参数粒子重新作为图像处理参数进行迭代计算,直到满足迭代终止条件,输出最优图像处理参数。本发明通过寻优目标函数代替传统的人为主观经验实现了寻优结果客观评价,提高了寻优结果准确性,从而提升视觉感知算法模型性能。
技术研发人员:刘琨,何业嘉
受保护的技术使用者:嬴彻星创智能科技(上海)有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!