一种多直达波时间相位联合的分布式无人机载SAR同步方法
本发明涉及一种多直达波时间相位联合的分布式无人机载sar同步方法,特别涉及一种基于直达波双向对传、时间相位比对和多链路联合解算的分布式无人机载sar的同步方法,属于机载分布式sar同步。
背景技术:
1、分布式无人机载合成孔径雷达(distributed unmanned aerial vehiclesynthetic aperture radar,uav di-sar)是一种在单基地sar的基础上发展出的sar系统。每个平台均挂载一部具有收发能力的雷达,每部雷达均向观测场景中发射正交信号,所有雷达都接收场景反射的回波信号,相当于一个阵元彼此分离的mimo-sar,因此其既能实现层析维高分辨率,又可以实现高时效性。近年来,随着无人机平台技术的发展,多旋翼无人机的负载能力、续航能力以及飞行航迹控制能力不断提升;随着微电子等技术的发展,sar系统逐渐小型化,具备了将sar系统挂载到无人机平台上的条件。无人机载sar与星载sar、有人机载sar相比,具有成本低、无人员安全风险、起降方便以及机动灵活等优点,具有广阔的应用前景。
技术实现思路
1、本发明的技术解决问题是:克服已有技术的不足,提出一种基于直达波信息的分布式无人机载sar联合同步方法,该方法能够解决分布式无人机载sar同步问题,该方法为一种适用于π模糊解算和低信噪比下同步误差解算的解决方案。为了解决π模糊问题,基于一般双基地sar同步算法中同步信息提取的框架,采用峰值时间和相位信息联合比对方法,以适应双向链路同步法引入的π模糊问题;再提出多同步链路联合时间、相位解算方法,以适应较低信噪比环境下的同步信息提取。所提方法旨在提供一种适用π模糊解算和低信噪比下同步误差解算的解决方案,可以应用于分布式sar的同步领域。
2、本发明的技术解决方案是:
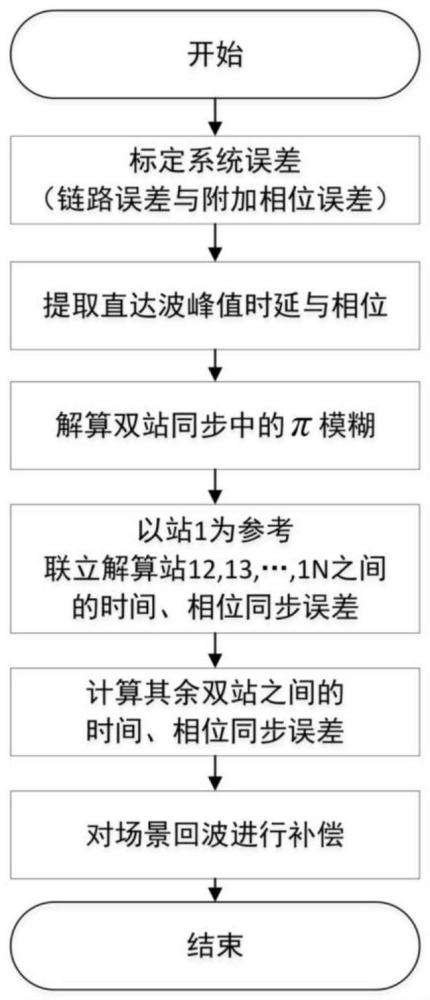
3、一种多直达波时间相位联合的分布式无人机载sar同步方法,该方法的步骤包括:
4、步骤一、系统误差标定
5、对分布式无人机载sar系统进行地面系统误差标定,得到标定后的时不变发射、接收链路时间、相位误差值;
6、步骤二、π模糊解算
7、对分布式无人机载sar系统飞行采集的数据提取直达波峰值时间与相位,并进行π模糊解算,得到相位误差估计值的π模糊值;
8、步骤三、多站同步误差联合解算
9、对步骤二中得到的多组链路的直达波峰值时间与相位进行时间、相位误差联合解算,得到多组链路需要补偿的时间、相位误差;
10、步骤四、同步误差补偿
11、对步骤二中分布式无人机载sar系统飞行采集的数据分别补偿步骤一中得到的标定后的时不变发射、接收链路时间、相位误差值,步骤二中得到的相位误差估计值的π模糊值和步骤三中得到的多组链路需要补偿的时间、相位误差,得到联合同步后的sar回波。
12、有益效果
13、本发明针对分布式无人机载sar同步中双向链路同步导致的π模糊问题和多组链路的线性关系对于改善同步精度的可能性,提出了一种多直达波时间相位联合的分布式无人机载sar同步方法。该方法通过时间相位比对,解算得到相位误差的π模糊值,并构建了多组同步链路的误差线性模型,并基于最小二乘方法,完成了多组同步链路的时间、相位同步误差联合解算。本发明预计可有效实现分布式无人机载sar同步处理,为获取高分辨分布式无人机载三维目标观测图像提供帮助。
技术特征:
1.一种多直达波时间相位联合的分布式无人机载sar同步方法,其特征在于,包括如下步骤:
2.如权利要求1一种多直达波时间相位联合的分布式无人机载sar同步方法,其特征在于,步骤一中,以站i为例,其发射链路延迟di,t与接收链路延迟di,r和为:
3.如权利要求1一种多直达波时间相位联合的分布式无人机载sar同步方法,其特征在于,步骤二中,经过相位同步后,站i发射并被站j接收的信号相位与站j发射并被站i接收的信号相位模型均为:
4.如权利要求1一种多直达波时间相位联合的分布式无人机载sar同步方法,其特征在于,步骤二中,当起始时刻为0时,补偿时间误差后回波脉压峰值时间为:
5.如权利要求1一种多直达波时间相位联合的分布式无人机载sar同步方法,其特征在于,步骤三中,所述时间误差的联合解算方法为:
6.如权利要求1一种多直达波时间相位联合的分布式无人机载sar同步方法,其特征在于,步骤三中,所述相位误差的联合解算方法为:
技术总结
本发明公开了一种多直达波时间相位联合的分布式无人机载SAR同步方法,能够解决双向链路同步方案下的π模糊问题和低信噪比下同步链路联合解算,在传统双基地SAR同步算法框架下采用峰值时间和相位信息联合比对方法,以适应双向链路同步法引入的π模糊问题,再提出多同步链路联合时间、相位解算方法,以适应较低信噪比环境下的同步信息提取,实现UAV Di‑SAR回波的良好聚焦,得到质量较高的图像。
技术研发人员:丁泽刚,李凌豪,严俊杰,王震,孙宇,马鑫农
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!