一种用于LoRa网关的α-β动态统计高精度定位方法与流程
本发明涉及lora定位应用领域,尤其涉及一种用于lora网关的α-β动态统计高精度定位方法。
背景技术:
1、随着物联网行业的发展,基于位置感知的应用同步激增,定位成为一个热门需求。lora(long range radio,远距离无线电)作为一种lpwan物联网技术,也有定位需求。
2、lora主要是通过多lora网关基站来实现定位,也可以与其他技术配套实现定位功能。当前,lora网关基站定位主要是根据多台lora网关对接收到的定位信号的tdoa(timedifference of arrival,到达时间差)信息来进行静态定位计算。tdoa定位算法,对时标信息有严苛的依赖,要求各lora网关具有共同的高精度时间基准,否则定位误差会很大。
3、与易于提供同步时钟源的wifi、蓝牙、zigbee等局域网定位系统不同,lora属于广域网系统、通常采用相距较远的分布式基站,为其构建高精度时间同步系统非常困难、且费用非常昂贵。常见的是折中采用gps授时来同步时间基准、存在较大的定位误差;gps开放的民用授时精度为100ns、其直接光速测距误差为30m,叠加其它因素带来的定位误差会更大。当前基于tdoa算法的lora定位精度范围为20-200m,处于中精度定位水平。20m对于旷野畜牧资产管理等应用场景勉强够用、对园区定位已然不够用,200m甚至不再适用于畜牧等很多应用场景,需要提出新的定位算法来提高定位精度。
技术实现思路
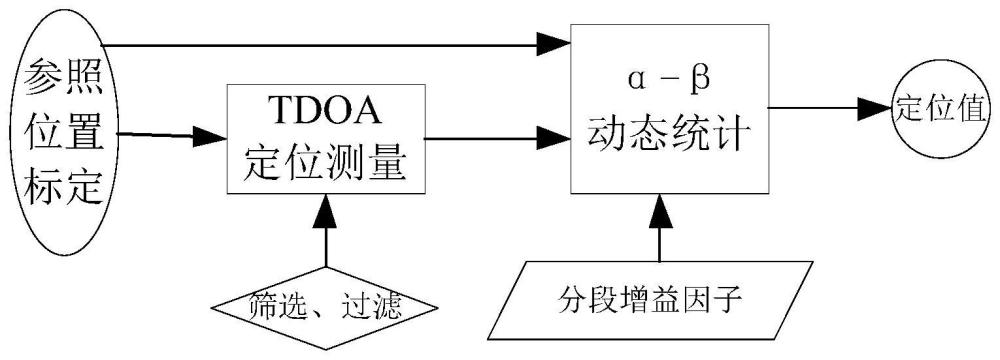
1、本发明针对现有技术中存在的技术问题,提供一种用于lora网关的α-β动态统计高精度定位方法,基于参照位置标定参数及实时统计的运动轨迹信息,优化了常规的tdoa定位测量过程,创新采用分段式增益因子的调节策略、改良了α-β动态统计过程,能将gps授时情况下的定位精度提升至5m-8m的效果。
2、根据本发明的第一方面,提供了一种用于lora网关的α-β动态统计高精度定位方法,包括:
3、步骤1,基于定位对象的各种参照物的位置信息得到所述定位对象的初始化位置标定信息;
4、步骤2,对lora定位信号采用tdoa算法进行计算得到所述定位对象的tdoa位置标定信息;
5、步骤3,构建表示所述定位对象的当前定位与上一次定位的初始关系的α-β动态统计方程;基于所述初始化位置标定信息初始化所述α-β动态统计方程后,基于所述α-β动态统计方程得到所述定位对象的位置预测值;基于所述tdoa位置标定信息和所述位置预测值确定误差;
6、步骤4,根据所述定位对象所处环境的信号质量计算α-β动态统计算法的增益因子,基于所述误差和所述增益因子得到表示所述定位对象的当前定位与上一次定位的关系的更新动态方程,基于所述更新动态方程输出所述定位对象的最终定位值。
7、在上述技术方案的基础上,本发明还可以作出如下改进。
8、可选的,所述步骤1中通过手动标定和/或自动标定的方式获取各种参照物的位置信息;
9、所述参照物的种类包括:出发地、必经地、目的地和固定参照物;所述参照物的位置信息包括:三维位置坐标和时标信息。
10、可选的,所述步骤2包括:
11、步骤201,采用滑窗均值方式对最近的连续4帧的所述lora定位信号取均值,基于该均值对新接收的所述lora定位信号进行筛选;
12、步骤202,对筛选后的所述lora定位信号采用tdoa算法进行计算得到所述定位对象的tdoa位置标定信息;
13、步骤203,采用均值过滤法剔除所述tdoa位置标定信息中的奇异值。
14、可选的,所述步骤3中基于所述初始化位置标定信息初始化所述α-β动态统计方程包括:
15、所述α-β动态统计方程为:
16、
17、其中,x(k)和x(k-1)分别为定位对象的当前以及上一次的定位值及位置变化率,t为针对每个目标定位计算的节拍之间的时间周期;ω(k)为过程噪声。
18、可选的,所述步骤3中基于所述α-β动态统计方程得到所述定位对象的位置预测值的预测方程为:
19、z(k)=[1 t]x(k-1)+ρ(k);
20、其中,z(k)表示定位对象的位置预测值,t为针对每个目标定位计算的节拍之间的时间周期,x(k-1)表示为定位对象上一次的定位值及位置变化率,ρ(k)为预测噪声。
21、可选的,所述步骤3中基于所述tdoa位置标定信息和所述位置预测值确定误差的误差方程为:
22、δ(k)=z(k)-m(k);
23、δ(k)表示当前节拍的误差,z(k)表示定位对象的位置预测值,m(k)为所述tdoa位置标定信息。
24、可选的,所述步骤4中α-β动态统计算法的增益因子调整策略包括:
25、设定门限,所述误差超过所述门限时,所述增益因子k=[1,1],否则,所述增益因子α、β表示α-β动态统计算法的滤波平滑值。
26、可选的,所述步骤4中α-β动态统计算法的增益因子调整策略包括:
27、设定门限,所述误差超过所述门限时,所述增益因子k=[0,0],否则,所述增益因子α、β表示α-β动态统计算法的滤波平滑值。
28、可选的,所述步骤4中α-β动态统计算法的增益因子调整策略包括:
29、所述增益因子α、β表示α-β动态统计算法的滤波平滑值。
30、可选的,所述步骤4中的所述更新动态方程为:
31、其中,x(k)和x(k-1)分别为定位对象的当前以及上一次的定位值及位置变化率,t为针对每个目标定位计算的节拍之间的时间周期,k表示增益因子,δ(k)表示当前节拍的误差。
32、本发明提供的一种用于lora网关的α-β动态统计高精度定位方法,采用动态信息进行定位计算,不再需要对时标同步做出严格要求、只需要对定位对象从最初状态即开始进行统计分析、并不断记录其整个位置变化信息、并对记录的位置信息进行α-β动态统计分析,以动态分析的方式给出更加精准的定位值,能明显提高定位精度至5m-8m;同时算法逻辑清晰、运算量适中、易于实现;选用的α-β滤波模型属于最优估计算法、收敛性好、鲁棒性强;不需要严格的时标同步、为工程施工节省成本、带来便利;对常规的tdoa定位测量过程进行了优化、加入了信号筛选、奇异值剔除环节,降低了运算量、避免了异常值干扰;经过改良的α-β模型属于最优估计算法、收敛性好、鲁棒性强。本发明方法不再需要严格的时标同步、为工程施工节省成本、带来便利;统计了丰富的动态信息、能明显降低定位误差,定位值更加准确、精度更高。
技术特征:
1.一种用于lora网关的α-β动态统计高精度定位方法,其特征在于,所述定位方法包括:
2.根据权利要求1所述的定位方法,其特征在于,所述步骤1中通过手动标定和/或自动标定的方式获取各种参照物的位置信息;
3.根据权利要求1所述的定位方法,其特征在于,所述步骤2包括:
4.根据权利要求1所述的定位方法,其特征在于,所述步骤3中基于所述初始化位置标定信息初始化所述α-β动态统计方程包括:
5.根据权利要求1所述的定位方法,其特征在于,所述步骤3中基于所述α-β动态统计方程得到所述定位对象的位置预测值的预测方程为:
6.根据权利要求1所述的定位方法,其特征在于,所述步骤3中基于所述tdoa位置标定信息和所述位置预测值确定误差的误差方程为:
7.根据权利要求1所述的定位方法,其特征在于,所述步骤4中α-β动态统计算法的增益因子调整策略包括:
8.根据权利要求1所述的定位方法,其特征在于,所述步骤4中α-β动态统计算法的增益因子调整策略包括:
9.根据权利要求1所述的定位方法,其特征在于,所述步骤4中α-β动态统计算法的增益因子调整策略包括:
10.根据权利要求1所述的定位方法,其特征在于,所述步骤4中的所述更新动态方程为:
技术总结
本发明涉及一种用于LoRa网关的α‑β动态统计高精度定位方法,包括:基于定位对象的各种参照物的位置信息得到定位对象的初始化位置标定信息;对LoRa定位信号采用TDOA算法进行计算得到定位对象的TDOA位置标定信息;构建表示定位对象的当前定位与上一次定位的初始关系的α‑β动态统计方程;基于初始化位置标定信息初始化α‑β动态统计方程后,得到定位对象的位置预测值;基于TDOA位置标定信息和位置预测值确定误差;根据定位对象所处环境的信号质量计算α‑β动态统计算法的增益因子,基于误差和增益因子得到表示定位对象的更新动态方程,基于更新动态方程输出定位对象的最终定位值;基于参照位置标定参数及实时统计的运动轨迹信息,提高定位精度。
技术研发人员:张林兵,徐武剑,罗玲
受保护的技术使用者:武汉移星科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!