云台摄像头可视化标签定位方法与流程
本发明属于视频监控,具体涉及一种云台摄像头可视化标签定位方法。
背景技术:
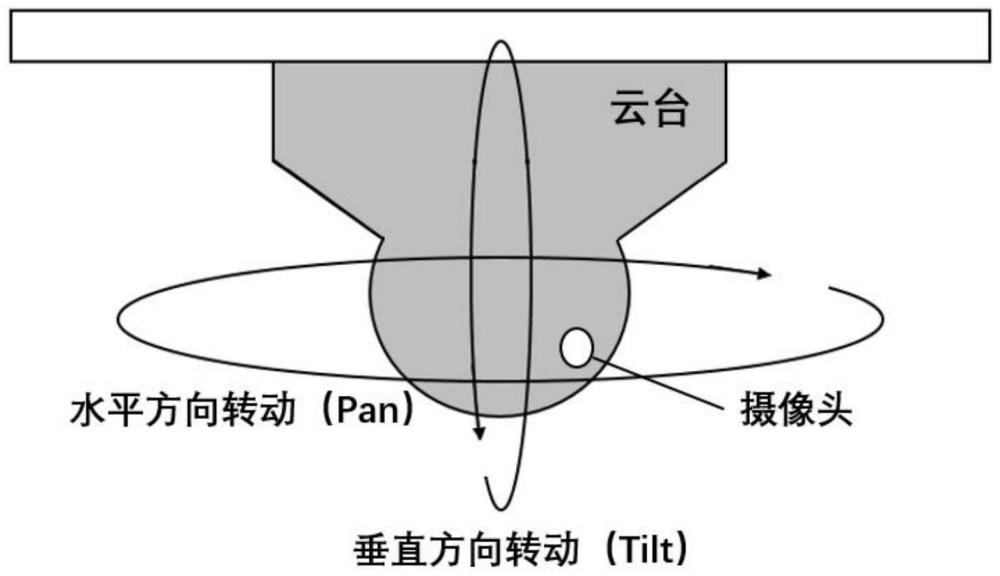
1、视频可视化标注可直观的体现视频场景中的关键物体,并实现视频与物体之间的联动,实现视频的ar功能。现有视频场景标注主要采用ai技术对图像内容进行识别,如人物、车辆等,但ai识别需要大量的计算机算力,同时存在一定的识别率,识别物一般只能分类,无法与监控目标进行关联。同时带云台的摄像头,当云台转动时,视频场景会随之移动,如果标注信息不能随动,将导致标注信息与实际所标注物体之间位置的偏离。
2、因此,亟需提供一种云台摄像头可视化标签定位方法,通过云台的偏转角度来获取物体在现实屏幕上的移动位置,从而保证标注信息与标注物之间位置的一致性。
技术实现思路
1、为解决现有技术中存在的上述问题,本发明提供了一种云台摄像头可视化标签定位方法,通过云台的偏转角度来获取物体在现实屏幕上的移动位置,从而保证了标注信息与标注物之间位置的一致性。
2、本发明的目的可以通过以下技术方案实现:
3、一种云台摄像头可视化标签定位方法,包括以下步骤:
4、s1、选中屏幕中的任意一点p作为标注点,将p点的屏幕坐标转换为云台球面坐标保存至数据库中;
5、s2、云台根据控制指令转动,获取屏幕视口的球面坐标范围,依据屏幕视口的球面坐标范围在数据库中查询获取屏幕视口范围的所有标注点;
6、s3、获取处于当前屏幕视口的球面坐标范围内的所有标注点的屏幕坐标,并将标注点重新映射到屏幕上,进行重绘。
7、进一步地,所述步骤s1中,将p点的屏幕坐标转换为云台球面坐标包括以下步骤:
8、s11、通过摄像头厂商api获取视场角的角度数值,并将角度数值转换为弧度数值;
9、其中,角度数值与弧度数值的转换公式为:弧度数值=角度数值*pi/180;式中,pi为圆周率,取值3.1416;
10、s12、通过p点的屏幕坐标计算p点水平方向的球面坐标spherex,其中p点的屏幕坐标表示为:p(screenx,screeny);
11、s13、通过p点的屏幕坐标计算p点垂直方向的球面坐标spherey。
12、进一步地,所述步骤s12中,计算p点水平方向的球面坐标spherex包括以下步骤:
13、计算屏幕上p点的水平方向的中心点夹角α:
14、α=arctan(pc/oc);
15、式中,pc为p点到屏幕视口中心点c的距离,pc=screenx-screenwidth/2,oc为摄像头中心点o到屏幕视口中心点c的距离,oc的计算公式为:
16、oc=screenwidth/(2×tan(fovpan/2));
17、式中,screenwidth为屏幕视口宽度,screenwidth的单位是像素值;screenwidth的大小为屏幕视口水平位置的两个端点a、b之间的距离;fovpan为水平视场角,fovpan的单位是弧度(rad);
18、p点水平方向的球面坐标spherex的计算公式为:
19、spherex=panpos+α;
20、式中,panpos为当前摄像头在云台水平方向的位置,panpos和α的单位为弧度(rad)。
21、进一步地,所述步骤s13中,计算p点垂直方向的球面坐标spherey的公式为:spherey=tiltpos+β;
22、式中,tiltpos为当前摄像头在云台垂直方向的位置,β为垂直方向的中心点夹角,tiltpos和β的单位为弧度(rad);β的计算公式为:
23、β=arctan[((screeny–screenheight/2)/screenheight/2)×tan(fovtilt/2)];
24、式中,screenheight为屏幕视口高度,screenheight的单位是像素值;fovtilt为垂直视场角,fovtilt的单位是弧度(rad)。
25、进一步地,所述步骤s2中,屏幕视口的球面坐标范围表示为:
26、水平方向:panpos-fovpan/2,panpos+fovpan/2;
27、垂直方向:tiltpos-fovtilt/2,tiltpos+fovtilt/2;
28、式中,panpos为当前摄像头在云台水平方向的位置,tiltpos为当前摄像头在云台垂直方向的位置,fovpan为水平视场角,fovtilt为垂直视场角。
29、进一步地,所述步骤s3中,通过标注点的云台球面坐标获取标注点的屏幕坐标的转换公式为:
30、
31、
32、式中,spherex为p点水平方向的球面坐标,spherey为p点垂直方向的球面坐标,screenwidth为屏幕视口宽度,screenheight为屏幕视口高度,screenx为p点水平方向的屏幕坐标,screeny为p点垂直方向的屏幕坐标,panpos为当前摄像头在云台水平方向的位置,tiltpos为当前摄像头在云台垂直方向的位置,fovpan为水平视场角,fovtilt为垂直视场角。
33、本发明的有益效果为:
34、本发明通过将标注点的屏幕坐标转换为球面坐标,以绝对位置的形式保存于数据库中,当云台摄像头发生转动后,通过获取当前屏幕视口的范围,从数据库中查询出当前屏幕视口的范围内的所有标注点,并将标注点的球面坐标转换为屏幕坐标后重绘在移动了位置的屏幕上,达到标注点随动的效果,避免了标注信息与实际所标注物体之间位置的偏离的问题。
技术特征:
1.一种云台摄像头可视化标签定位方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种云台摄像头可视化标签定位方法,其特征在于:所述步骤s1中,将p点的屏幕坐标转换为云台球面坐标包括以下步骤:
3.根据权利要求2所述的一种云台摄像头可视化标签定位方法,其特征在于:所述步骤s12中,计算p点水平方向的球面坐标spherex包括以下步骤:
4.根据权利要求3所述的一种云台摄像头可视化标签定位方法,其特征在于:所述步骤s13中,计算p点垂直方向的球面坐标spherey的公式为:spherey=tiltpos+β;
5.根据权利要求1所述的一种云台摄像头可视化标签定位方法,其特征在于:所述步骤s2中,屏幕视口的球面坐标范围表示为:
6.根据权利要求1所述的一种云台摄像头可视化标签定位方法,其特征在于:所述步骤s3中,通过标注点的云台球面坐标获取标注点的屏幕坐标的转换公式为:
技术总结
本发明涉及一种云台摄像头可视化标签定位方法,属于视频监控技术领域,包括以下步骤:选中屏幕中的任意一点P作为标注点,将P点的屏幕坐标转换为云台球面坐标保存至数据库中;云台根据控制指令转动,获取屏幕视口的球面坐标范围,依据屏幕视口的球面坐标范围在数据库中查询获取屏幕视口范围的所有标注点;获取处于当前屏幕视口的球面坐标范围内的所有标注点的屏幕坐标,并将标注点重新映射到屏幕上,进行重绘。本发明提供了一种云台摄像头可视化标签定位方法,通过云台的偏转角度来获取物体在现实屏幕上的移动位置,从而保证了标注信息与标注物之间位置的一致性。
技术研发人员:马栓祥,童玲,陈华玮,李禄勇,杨伟,叶水平
受保护的技术使用者:天讯瑞达通信技术有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!