一种门禁灯箱的定位方法与流程
本发明涉及定位,尤指一种门禁灯箱的定位方法。
背景技术:
1、社区中常安装了大量的门禁设备,包含了小区的大门、楼栋门、单元门、地下车库的门等。工程及运营人员需要对设备进行维护或者更换门禁灯箱上的画刊时,因为小区过大或者环境复杂,如在地下车库中时,则很难快速的寻找到目标的设备。
2、传统的定位技术常通过gps帮助使用者进行导航,但gps需要接收到多个卫星信号才能确定位置,但在室内环境或卫星信号质量不好的地方定位准确性较差。
3、蓝牙aoa(angle of arrival)技术是一种用于确定蓝牙设备位置的技术。通过测量蓝牙信号从发射设备到接收设备的入射角来确定发射设备的位置。蓝牙aoa技术通过使用多个接收天线来确定信号的入射角,从而确定发射设备的位置。蓝牙aoa技术存在范围有限的缺点,蓝牙aoa技术的测量范围受限,通常仅在距离较小的环境中使用。
技术实现思路
1、为解决上述问题,本发明提供一种门禁灯箱的定位方法。
2、为实现上述目的,本实用发明的技术方案是:
3、一种门禁灯箱的定位方法,包括以下步骤:
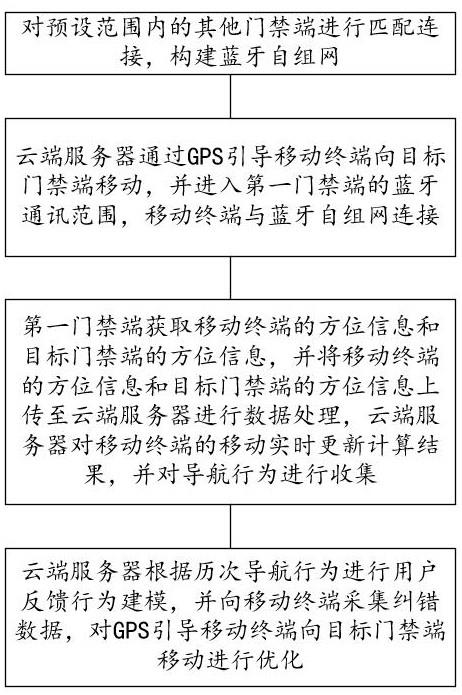
4、对预设范围内的所有门禁端进行匹配连接,构建蓝牙自组网;
5、云端服务器通过gps引导移动终端向目标门禁端移动,当进入第一门禁端的蓝牙通讯范围时,移动终端与所述蓝牙自组网连接;
6、第一门禁端获取移动终端的方位信息和目标门禁端的方位信息,并将移动终端的方位信息和目标门禁端的方位信息上传至云端服务器进行数据处理,云端服务器对移动终端的移动实时更新计算结果,并对导航行为进行收集;
7、云端服务器根据历次导航行为进行用户反馈行为建模,并向移动终端采集纠错数据,对gps引导移动终端向目标门禁端移动路径进行优化。
8、进一步地,所述第一门禁端获取移动终端的方位信息和所述目标门禁端的方位信息具体为:
9、所述第一门禁端使用aoa和rssi捕捉所述移动终端相对所述第一门禁端的角度和距离,得出以所述第一门禁端为原点且以正北为正方向时移动终端的距离坐标并将其发送至所述云端服务器;
10、所述第一门禁端通过所述蓝牙自组网以所述第一门禁端为原点通过蓝牙自组网获取目标门禁端的距离坐标并将其发送至所述云端服务器。
11、进一步地,所述计算结果包含所述移动终端与所述目标门禁端的距离以及目标门禁端的方向数据,所述目标门禁端的方向数据以移动终端为原点且以正北为正方向确定。
12、进一步地,所述移动终端与所述目标门禁端的距离d采用如下公式计算:
13、,
14、上式中,d表示所述移动终端与所述目标门禁端距离,表示所述第一门禁端以正北为正方向与所述移动终端形成的夹角度数,d表示所述移动终端与所述第一门禁端之间的距离,表示第一门禁端的横坐标,表示第一门禁端的纵坐标,表示目标门禁端的横坐标,表示目标门禁端的纵坐标。
15、进一步地,所述目标门禁端的方向数据计算方法为:所述云端服务器通过所述移动终端的距离坐标和所述目标门禁端的距离坐标计算出所述目标门禁端的方向数据,所述云端服务器将所述计算结果实时发送至所述移动终端。
16、进一步地,所述移动终端与所述蓝牙自组网连接具体包括:
17、当所述移动终端进入第一门禁端的范围后只能接收到第一门禁端的蓝牙信号时,所述移动终端与所述第一门禁端建立连接;
18、当所述移动终端进入第一门禁端的范围后能接收到多个门禁端的蓝牙信号时,所述移动终端对所述多个门禁端的蓝牙信号进行强弱比对并建立连接。
19、进一步地,所述导航行为包含行走路径、到达时间差异和天气条件。
20、进一步地,所述云端服务器根据历次所述导航行为进行用户反馈行为建模具体为:
21、通过编码将不同的所述天气条件转换为数值;
22、通过连续的数值特征,表示预计到达时间与实际到达时间之间的差异;
23、通过连续的蓝牙连接日志,计算用户的行走路径。
24、进一步地,所述云端服务器根据历次所述导航行为进行用户反馈行为建模采用线性回归模型,所述线性回归模型如下:
25、,
26、上式中y表示导航误差,表示天气条件,表示到达时间偏差,表示行走路径,表示截距,表示天气条件对预测的影响,表示到达时间偏差对预测的影响,表示行走路径对预测的影响,表示误差项。
27、本发明的有益效果在于:本发明通过在小区或社区的门禁设备之间建立蓝牙连接,形成一个蓝牙自组网,实现设备间的相互通信与数据共享。当移动终端需要定位某个门禁时,首先利用gps进行大范围的导航。随着移动终端逐渐靠近目标,它会自动连接到该蓝牙自组网。门禁设备可以获取移动终端及目标门禁的方位信息,并实时上传到云端服务器进行分析和处理。云端服务器实时更新并处理移动终端的位置数据,同时收集其导航行为,基于这些累积的导航行为数据,云端服务器采用模型学习技术进行用户反馈行为建模。云端服务器会向移动终端发送纠错数据,从而优化gps导航,确保移动终端能够精确地被引导到目标门禁端。
技术特征:
1.一种门禁灯箱的定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种门禁灯箱的定位方法,其特征在于,所述第一门禁端获取移动终端的方位信息和所述目标门禁端的方位信息具体为:
3.根据权利要求1所述的一种门禁灯箱的定位方法,其特征在于,所述计算结果包含所述移动终端与所述目标门禁端的距离以及目标门禁端的方向数据,所述目标门禁端的方向数据以移动终端为原点且以正北为正方向确定。
4.根据权利要求3所述的一种门禁灯箱的定位方法,其特征在于,所述移动终端与所述目标门禁端的距离d采用如下公式计算:
5.根据权利要求3所述的一种门禁灯箱的定位方法,其特征在于,所述目标门禁端的方向数据计算方法为:所述云端服务器通过所述移动终端的距离坐标和所述目标门禁端的距离坐标计算出所述目标门禁端的方向数据,所述云端服务器将所述计算结果实时发送至所述移动终端。
6.根据权利要求1所述的一种门禁灯箱的定位方法,其特征在于,所述移动终端与所述蓝牙自组网连接具体包括:
7.根据权利要求1所述的一种门禁灯箱的定位方法,其特征在于,所述导航行为包含行走路径、到达时间差异和天气条件。
8.根据权利要求7所述的一种门禁灯箱的定位方法,其特征在于,所述云端服务器根据历次所述导航行为进行用户反馈行为建模具体为:
9.根据权利要求8所述的一种门禁灯箱的定位方法,其特征在于,所述云端服务器根据历次所述导航行为进行用户反馈行为建模采用线性回归模型,所述线性回归模型如下:
技术总结
本发明涉及定位技术领域,尤指一种门禁灯箱的定位方法。本发明提出了一种门禁灯箱的高精度定位方法。通过对预设范围内的门禁端进行匹配连接,构建一个蓝牙自组网。云端服务器利用GPS技术引导移动终端向目标门禁端移动。当移动终端进入第一门禁端的蓝牙通讯范围时,与蓝牙自组网建立连接。第一门禁端捕获并上传移动终端及目标门禁端的方位信息至云端服务器进行进一步的数据处理。云端服务器实时更新并处理移动终端的位置数据,同时收集其导航行为,基于累积的导航行为数据,云端服务器采用模型学习技术进行用户反馈行为建模。随后,云端服务器向移动终端发送纠错数据,从而优化GPS导航,确保移动终端能够精确地被引导到目标门禁端。
技术研发人员:汪龙,邱雪雁,官轲
受保护的技术使用者:深圳市亲邻科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!