一种三维物体的表面覆盖扫描方法、装置、设备及介质
本发明涉及三维扫描,尤其涉及一种三维物体的表面覆盖扫描方法、装置、设备及介质。
背景技术:
1、在三维物体的形状测量或外观检测等应用过程中,常需要对三维物体的表面进行扫描,以获取三维物体的表面形状的相关数据。
2、传统的三维物体表面覆盖扫描方法通常采用单视点扫描物体表面,难以实现对三维物体的全覆盖扫描,并且单视点扫描存在所需扫描时间较长、扫描效率与扫描精度较低等问题。
技术实现思路
1、本发明提供了一种三维物体的表面覆盖扫描方法、装置、设备及介质,能够实现对三维物体的全覆盖扫描,并且能够有效减少扫描时间,提高扫描精度。
2、根据本发明的一方面,提供了一种三维物体的表面覆盖扫描方法,包括:
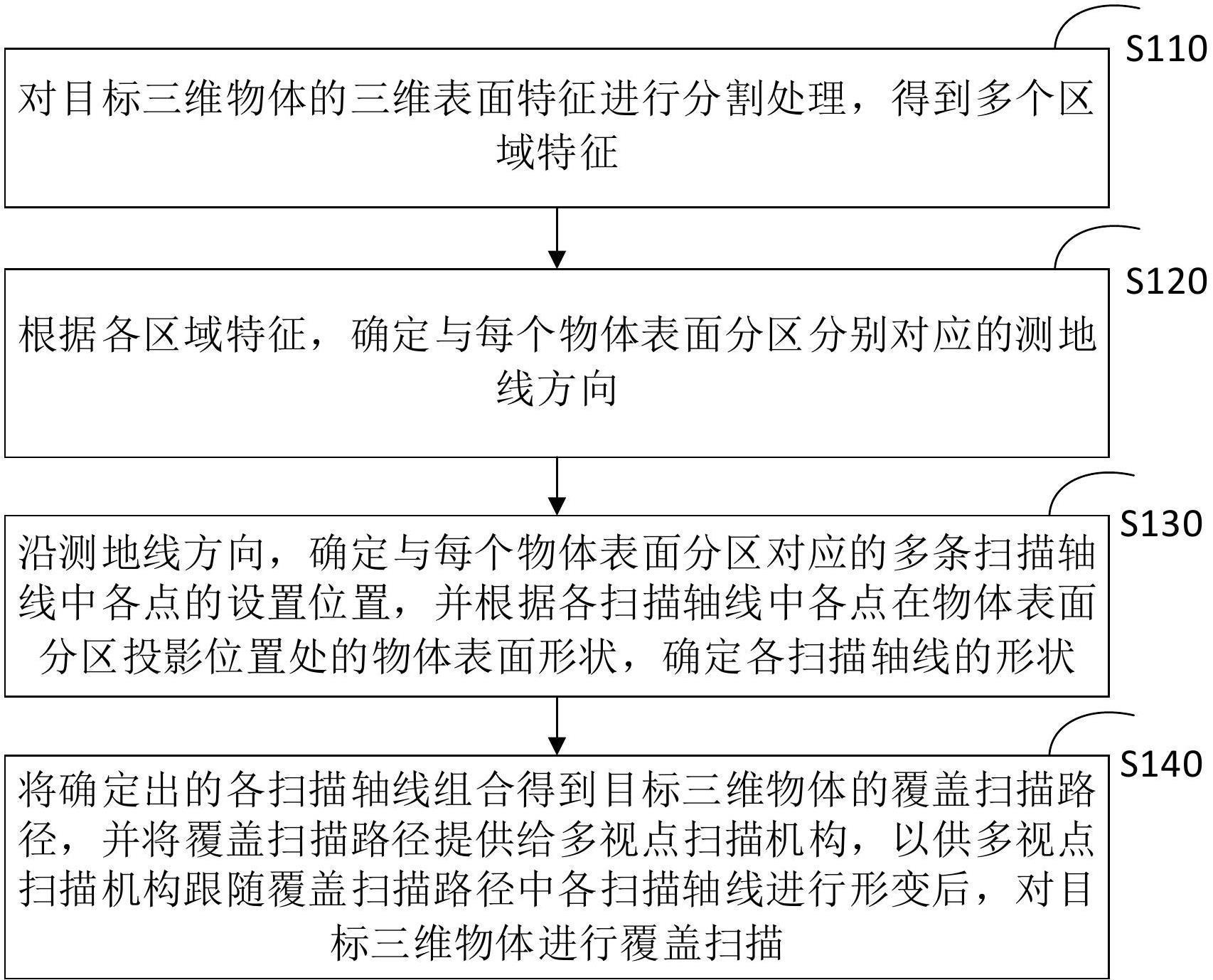
3、对目标三维物体的三维表面特征进行分割处理,得到多个区域特征,其中,不同区域特征对应目标三维物体上的不同物体表面分区,所述三维表面特征包括三维表面点云或者三维表面点云的变形格式;
4、根据各区域特征,确定与每个物体表面分区分别对应的测地线方向;
5、沿测地线方向,确定与每个物体表面分区对应的多条扫描轴线中各点的设置位置,并根据各扫描轴线中各点在物体表面分区投影位置处的物体表面形状,确定各扫描轴线的形状;
6、将确定出的各扫描轴线组合得到目标三维物体的覆盖扫描路径,并将覆盖扫描路径提供给多视点扫描机构,以供多视点扫描机构跟随覆盖扫描路径中各扫描轴线进行形变后,对目标三维物体进行覆盖扫描;
7、其中,多视点扫描机构包括可变形轴线和设置在可变形轴线上的多个摄像头,可变形轴线用于进行变形、扭转、拉伸以及压缩中的至少一项形变。
8、根据本发明的另一方面,提供了一种三维物体的表面覆盖扫描装置,包括:
9、区域特征获取模块,用于对目标三维物体的三维表面特征进行分割处理,得到多个区域特征,其中,不同区域特征对应目标三维物体上的不同物体表面分区,所述三维表面特征包括三维表面点云或者三维表面点云的变形格式;
10、测地线方向确定模块,用于根据各区域特征,确定与每个物体表面分区分别对应的测地线方向;
11、扫描信息确定模块,用于沿测地线方向,确定与每个物体表面分区对应的多条扫描轴线中各点的设置位置,并根据各扫描轴线中各点在物体表面分区投影位置处的物体表面形状,确定各扫描轴线的形状;
12、覆盖扫描模块,用于将确定出的各扫描轴线组合得到目标三维物体的覆盖扫描路径,并将覆盖扫描路径提供给多视点扫描机构,以供多视点扫描机构跟随覆盖扫描路径中各扫描轴线进行形变后,对目标三维物体进行覆盖扫描;
13、其中,多视点扫描机构包括可变形轴线和设置在可变形轴线上的多个摄像头,可变形轴线用于进行变形、扭转、拉伸以及压缩中的至少一项形变。
14、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
15、至少一个处理器;以及
16、与所述至少一个处理器通信连接的存储器;其中,
17、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的三维物体的表面覆盖扫描方法。
18、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的三维物体的表面覆盖扫描方法。
19、本发明实施例的技术方案,通过将目标三维物体的三维表面点云分割成多个区域点云,根据区域点云确定每个物体表面分区分别对应的测地线方向,沿测地线方向,确定与每个物体表面分区对应的多条扫描轴线中各点的设置位置,进而确定各扫描轴线的形状,并组合得到目标三维物体的覆盖扫描路径,以供多视点扫描机构跟随覆盖扫描路径中各扫描轴线进行形变后,对目标三维物体进行覆盖扫描的方式,能够对覆盖扫描路径进行优化,尽量减少覆盖扫描路径,有效减少了覆盖扫描时间,但同时又保证了覆盖扫描的扫描精度,提高了覆盖扫描效率。
20、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种三维物体的表面覆盖扫描方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,沿测地线方向,确定与每个物体表面分区对应的多条扫描轴线中各点的设置位置,并根据各扫描轴线中各点在物体表面分区投影位置处的物体表面形状,确定各扫描轴线的形状,包括:
3.根据权利要求2所述的方法,其特征在于,按照新的扫描轴线中各点的设置位置,确定各所述新的扫描轴线在所述目标物体表面分区中的投影参考线,并根据各所述投影参考线的曲线形状,确定各所述新的扫描轴线的形状,包括:
4.根据权利要求2所述的方法,其特征在于,所述安全距离由所述多视点扫描机构中摄像头视场的深度范围、精度和视场重叠范围大小共同确定;
5.一种三维物体的表面覆盖扫描装置,其特征在于,包括:
6.根据权利要求5所述的装置,其特征在于,所述扫描信息确定模块,包括:
7.根据权利要求6所述的装置,其特征在于,所述扫描轴线形状确定单元,具体用于:
8.根据权利要求6所述的装置,所述安全距离由所述多视点扫描机构中摄像头视场的深度范围、精度和视场重叠范围大小共同确定;
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-4中任一项所述的三维物体的表面覆盖扫描方法。
技术总结
本发明公开了一种三维物体的表面覆盖扫描方法、装置、设备及介质。该方法包括:对目标三维物体的三维表面特征进行分割处理,得到多个区域特征;根据各区域特征,确定与每个物体表面分区分别对应的测地线方向;沿测地线方向,确定与每个物体表面分区对应的多条扫描轴线中各点的设置位置,并确定各扫描轴线的形状;将确定出的各扫描轴线组合得到目标三维物体的覆盖扫描路径,并将覆盖扫描路径提供给多视点扫描机构,以供多视点扫描机构跟随覆盖扫描路径中各扫描轴线进行形变后,对目标三维物体进行覆盖扫描。采用上述技术方案,能够实现对三维物体的全覆盖扫描,并且能够有效减少扫描时间,提高扫描精度。
技术研发人员:张威,熊澳鑫,张博利
受保护的技术使用者:中国民航大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!