一种多角度自动拍照系统及拍照方法与流程
本发明涉及产品拍照,具体涉及一种多角度自动拍照系统及拍照方法。
背景技术:
1、在制造行业中,电子产品在入库检测及安装过程中,需要在对电子产品完成检验后拍照存档,以便后续出现质量故障有源可溯。多媒体图像记录作为产品质量记录中的重要一环,为产品状态追溯提供了可靠的图片参考依据。
2、目前主要采用单反相机人工拍照,但是人工拍摄每次只拍一张,工作效率较低,且存在拍摄图片质量差、成本高昂等问题。而现有的多媒体拍摄系统也存在不同型号的产品拍摄兼容性差、拍摄数据无法自动归档传输等不足。
3、另外,由于生产工艺等的各种未知的原因会对产品产生不同种类的外观缺陷,而这些缺陷会在不同的位置产生,为了确保产品质量可控,作为今后追溯产品状态的重要参考依据,拍摄的照片内容需要满足较高的一致性要求:有较高的清晰度;较少的干扰背景;较准确的拍摄角度和拍摄内容等等。
4、申请号为cn 202120025707.3的中国实用新型专利申请公开了一种多角度多光源拍照设备,包括箱体,箱体内设有用于固定拍照产品的治具组件、以及用于调整治具组件位置的治具运动组件、以及用于拍照治具组件上产品的拍摄组件、以及用于为拍摄组件提供光源支持的光源组件。但是该方案并未考虑到拍摄镜面产品时,相机在物体表面生成倒影,也并未考虑到相机的镜头在产品上形成倒影,在实际应用过程中,极大地影响了拍摄质量。另外,取得最佳的拍摄质量以在存储介质中清晰地重现被拍摄物体,数码相机中的对焦镜头必须获得准确的对焦位置,而对焦效果会直接影响到成像快慢与成像品质,极大地影响拍摄图像的清晰度。
技术实现思路
1、本发明的目的在于,针对上述现有技术的不足,提供一种多角度自动拍照系统及拍照方法,能够自动调整焦距到拍摄产品表面最清晰的模式,同时消除相机倒影对图像的影响,提高拍摄质量,获取最清晰的图像。
2、为解决上述技术问题,本发明所采用的技术方案是:
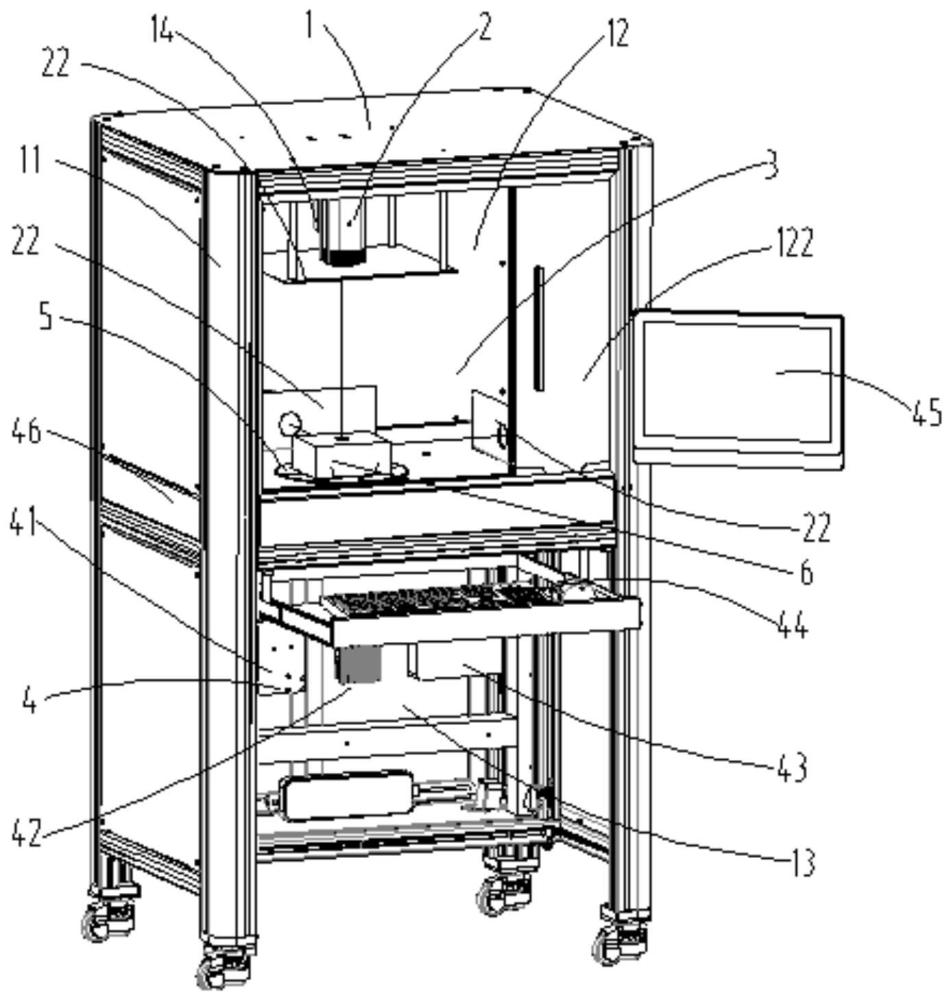
3、一种多角度自动拍照系统,包括拍摄箱,其特征在于,所述拍摄箱内设有用于固定产品的工作台、以及用于调整所述工作台位置的转台、以及用于拍照所述产品的拍照系统、以及用于为所述产品提供光源支持的补光系统;
4、所述拍照系统包括至少三个相机,第一相机用以获取所述产品的俯视图,第二相机用以获取所述产品的正视图,第三相机用以获取所述产品的侧视图;所述相机前方设有遮光面板,所述遮光面板设有与所述相机配合的孔洞,所述相机的镜头上设有单向玻璃。
5、进一步,所述拍摄箱上设有四联滑移门以及多个扩散板,所述补光系统包括安装在所述四联滑移门背部的反光板、以及安装在所述扩散板背部的光源。
6、进一步,所述工作台的台面设有用于定位所述产品的定位点或定位治具。
7、进一步,所述转台包括高减速比电机减速器。
8、本发明还包括一种自动拍照方法,采用上述所述的多角度自动拍照系统进行,包括:
9、s1、获取包括待拍摄物体的缩放尺寸为0的原始图像;
10、s2、计算所述原始图像的边缘梯度和方向,得到边缘图像;
11、s3、通过所述边缘图像,获取物体的像素点坐标,将所述物体的像素点坐标转换为世界坐标,获取物体实际尺寸以及位置;
12、s4、通过物品的实际尺寸以及位置,调整焦距,确认图像最优缩放比;
13、s5、根据图像最优缩放比,在预设焦距区间范围内,调整镜头焦距,获取每个焦距对应的图像;
14、s6、计算每一张图像的边缘信息以及图像熵;
15、s7、根据所述图像的边缘信息以及图像熵,通过加权算法,获取每一张图像的清晰度分数,确定焦点位置,拍摄所述产品的图像;所述焦点位置为分数最高的图像所使用的焦距,具体实现过程包括:
16、score=μi+(1-μ)h;
17、其中,score为图像的清晰度分数,μ为自定义权重信息,i为图像的边缘信息,h为图像熵。
18、进一步,步骤s1还包括,采用区域差值高斯金字塔对所述原始图像进行下采样,将所述原始图像的像素值缩小至设定值,具体实现过程包括:
19、
20、其中,g(x,y)为二维高斯函数,(x,y)为像素点在图像中的位置,(x0,y0)为像素点的期望,δ为标准差。
21、优选地,步骤s2中,采用canny算子,计算当前原始图像的边缘梯度和方向,得到边缘图像。
22、进一步,步骤s2中还包括,对所述边缘图像进行闭运算,去除图像噪声。
23、优选地,步骤s3中,将所述物体的像素点坐标转换为世界坐标的具体实现过程为:
24、
25、[xw,yw]t=r-1×(x,y)t+t;
26、其中,(x,y)表示物体于像素坐标中的中心点坐标,f为相机焦距,(x,y)表示物体的相机坐标,(xw,yw)为为像素点对应的世界坐标位置,r相机旋转矩阵,t为偏移向量。
27、优选地,步骤s6中,采用能量梯度法,获取图像的边缘信息,具体实现过程包括:
28、
29、其中,i表示计算的到图像边缘信息,i(i,j)表示坐标为(i,j)的像素点的灰度值;
30、图像熵的计算公式如下:
31、
32、其中,为发生概率;f(i,j)表示位于i点的像素灰度值与其周围像素灰度分布的综合特征,n表示图像的尺度。
33、与现有技术相比,本发明所具有的有益效果为:
34、(1)本发明能够快速适应不同的产品,采用多角度拍照方式,通过翻转和旋转拍摄产品,完成图像采集,满足不同产品的拍照需求;
35、(2)本发明能够防止拍摄镜面产品时,相机在物体表面生成倒影,消除或减弱相机倒影对图像的影响,提高拍摄质量,使产品拍摄质量和表面纹理更为接近真实、更清晰;
36、(3)本发明能够自动调整焦距到拍摄产品表面最清晰的模式,实现自动对焦,提高图像清晰度。
技术特征:
1.一种多角度自动拍照系统,包括拍摄箱(12),其特征在于,所述拍摄箱(12)内设有用于固定产品(6)的工作台(51)、以及用于调整所述工作台(51)位置的转台(52)、以及用于拍照所述产品(6)的拍照系统(2)、以及用于为所述产品(6)提供光源支持的补光系统(3);
2.根据权利要求1所述的多角度自动拍照系统,其特征在于,所述拍摄箱(12)上设有四联滑移门(122)以及多个扩散板(121),所述补光系统(3)包括安装在所述四联滑移门(122)背部的反光板(32)、以及安装在所述扩散板(121)背部的光源(33)。
3.根据权利要求1所述的多角度自动拍照系统,其特征在于,所述工作台(51)的台面设有用于定位所述产品(6)的定位点或定位治具。
4.根据权利要求1所述的多角度自动拍照系统,其特征在于,所述转台(52)包括高减速比电机减速器。
5.一种自动拍照方法,采用如权利要求1-4任一项所述的多角度自动拍照系统进行,其特征在于,包括:
6.根据权利要求5所述的自动拍照方法,其特征在于,步骤s1还包括,采用区域差值高斯金字塔对所述原始图像进行下采样,将所述原始图像的像素值缩小至设定值,具体实现过程包括:
7.根据权利要求5所述的自动拍照方法,其特征在于,步骤s2中,采用canny算子,计算当前原始图像的边缘梯度和方向,得到边缘图像。
8.根据权利要求7所述的自动拍照方法,其特征在于,步骤s2中还包括,对所述边缘图像进行闭运算,去除图像噪声。
9.根据权利要求5所述的自动拍照方法,其特征在于,步骤s3中,将所述物体的像素点坐标转换为世界坐标的具体实现过程为:
10.根据权利要求5所述的自动拍照方法,其特征在于,步骤s6中,采用能量梯度法,获取图像的边缘信息,具体实现过程包括:
技术总结
本发明提供一种多角度自动拍照系统及拍照方法,包括拍摄箱,所述拍摄箱内设有用于固定产品的工作台、以及用于调整所述工作台位置的转台、以及用于拍照所述产品的拍照系统、以及用于为所述产品提供光源支持的补光系统;所述拍照系统包括至少三个相机,第一相机用以获取所述产品的俯视图,第二相机用以获取所述产品的正视图,第三相机用以获取所述产品的侧视图;所述相机前方设有遮光面板,所述遮光面板设有与所述相机配合的孔洞,所述相机的镜头上设有单向玻璃。本发明能够自动调整焦距到拍摄产品表面最清晰的模式,同时消除相机倒影对图像的影响,提高拍摄质量,获取最清晰的图像。
技术研发人员:欧鹏程,邹融,李俊,方丁
受保护的技术使用者:湖南航天机电设备与特种材料研究所
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!