一种在航船舶水尺放大增强抓拍方法与流程
本发明涉及一种在航船舶水尺放大增强抓拍方法,属于航道船舶检测和抓拍。
背景技术:
1、船舶水尺是船舶上用于测量船舶吃水及载重的标志物,其准确识别对于安全导航、港口管理和海事执法具有关键意义。近年来,船舶检测与抓拍方向的技术日趋成熟,主要集中在对船舶本身及船舶船名的检测、抓拍和识别,船舶水尺尺寸较小、细节较多,与一般的船舶抓拍有所区别,船舶水尺的抓拍较难实现,目前尚未有针对船舶水尺图像的抓拍方法。
2、常用的船舶抓拍方法是采用雷达/ais进行目标检测,检测到有船只经过后触发相机进行抓拍,这种方法对水尺图像清晰抓拍的比例不高,大部分无法对在航船舶水尺的细节特征进行准确抓拍,无法达到对在航船舶识别查看水尺读数的目的。
技术实现思路
1、本发明所要解决的技术问题是:提供一种在航船舶水尺放大增强抓拍方法,通过高分辨率的成像和放大功能,允许抓拍者即使是在遥远的距离或者极度低光条件下也能精确地定位和观察目标。
2、本发明为解决上述技术问题采用以下技术方案:
3、一种在航船舶水尺放大增强抓拍方法,包括如下步骤:
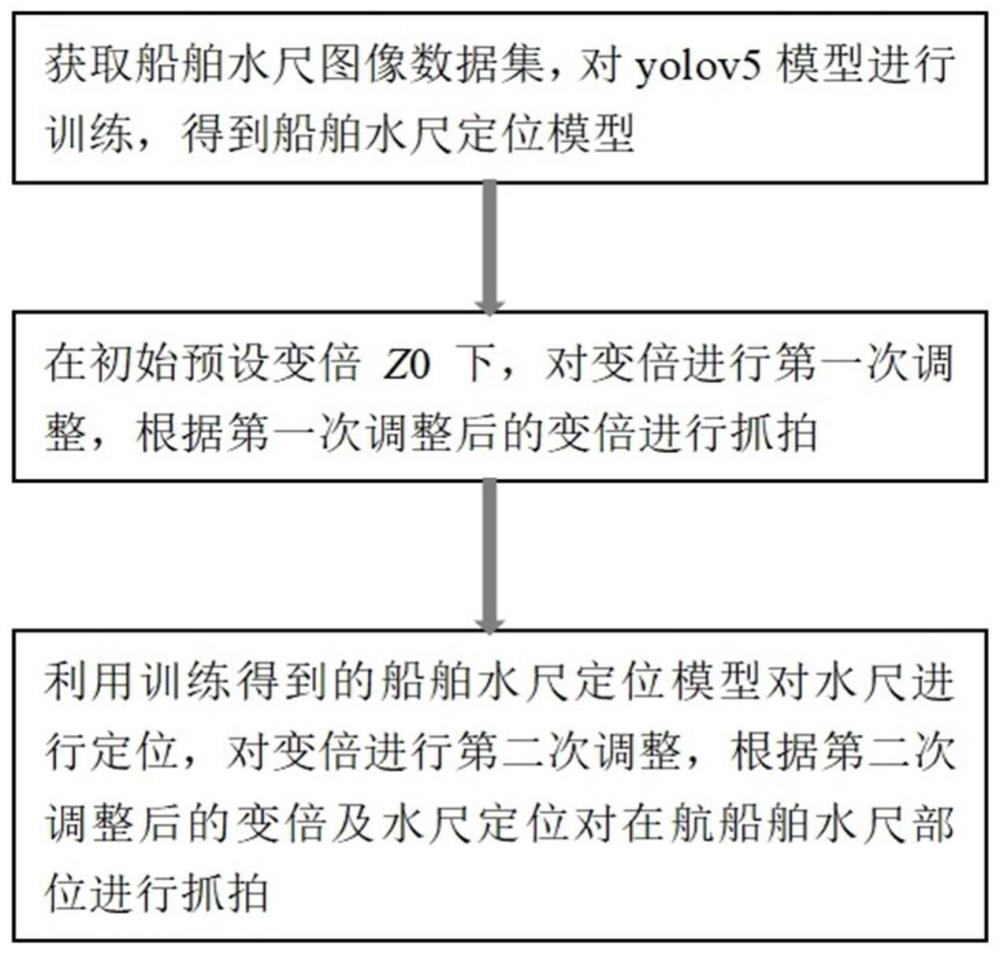
4、步骤1,获取船舶水尺图像数据集,利用所述船舶水尺图像数据集对yolov5模型进行训练,得到船舶水尺定位模型;
5、步骤2,在抓拍相机初始预设变倍z0下,当检测到在航船舶完全进入检测相机画面时,检测船舶在检测相机画面中的位置,对抓拍相机变倍进行第一次调整,根据第一次调整后的变倍对在航船舶进行抓拍,第一次调整后的变倍为:
6、
7、其中,z1为第一次调整后的变倍,n为第一次调整变倍后抓拍到的船舶图像数量,k为修正参数,x1为检测相机检测出的船舶矩形框左下角x轴坐标,x2为检测相机检测出的船舶矩形框右上角x轴坐标;
8、步骤3,根据第一次调整变倍后抓拍到的船舶图像,利用步骤1训练得到的船舶水尺定位模型对在航船舶水尺进行定位,对抓拍相机变倍进行第二次调整,根据第二次调整后的变倍以及水尺定位对在航船舶水尺部位进行抓拍,从而得到船舶水尺放大增强图像,第二次调整后的变倍为:
9、
10、其中,将抓拍相机所在经纬度的日出时间之后的时间至日落时间之前的时间定义为白天,其他时间定义为夜间,z为第二次调整后的变倍,x=min{x1,x2,…,xn},y=min{y1,y2,…,yn},x1,x2,…,xn分别为水尺在水平方向上占第一次调整变倍后抓拍到的第一张、第二张、…、第n张船舶图像的比例,y1,y2,…,yn分别为水尺在垂直方向上占第一次调整变倍后抓拍到的第一张、第二张、…、第n张船舶图像的比例。
11、作为本发明的一种优选方案,所述步骤1的具体过程如下:
12、1)获取包含水尺的船舶图像数据集,数据集中的船舶图像不少于5000张,且数据集中的船舶图像包括不同应用场景下不同类型船舶水尺,应用场景包括白天和夜间,船舶类型包括货船、客船、滚装船、拖船、集装箱船以及公务船;
13、2)对1)获取的船舶图像数据集中的船舶图像进行标注,标注水尺框并提供对应的类别标签,类别标签包括是水尺和不是水尺两类;
14、3)利用标注后的数据集对yolov5模型进行训练,利用反向传播算法优化模型的参数,得到船舶水尺定位模型。
15、作为本发明的一种优选方案,根据权利要求2所述的在航船舶水尺放大增强抓拍方法,其特征在于,所述yolov5模型包括输入端、主干网络、neck网络和输出端;输入端采用mosaic数据增强,对包含水尺的船舶图像数据集进行随机缩放、随机裁剪和随机排布;主干网络包括focus模块和csp模块,focus模块用于对输入端数据增强后的图像进行聚焦和压缩,将高分辨率图像转化为低分辨率图像;输出端采用giou_loss损失函数,giou_loss损失函数的公式为:其中,iouloss为giou_loss损失,a为真实标签,b为预测标签。
16、作为本发明的一种优选方案,所述步骤2中,n不小于3,k的取值为1.18。
17、一种计算机设备,包括存储器、处理器,以及存储在所述存储器中并能够在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的在航船舶水尺放大增强抓拍方法的步骤。
18、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的在航船舶水尺放大增强抓拍方法的步骤。
19、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
20、1、本发明提供一种适用于在航船舶的水尺放大增强抓拍技术,该项技术解决了在航船舶水尺细节聚焦不清的难题,使用该技术抓拍的水尺照片具有成像高清、细节人眼可辨。通过高分辨率的成像和放大功能,允许操作者精确地定位和观察目标,即使是在遥远的距离或者极度低光条件下。采用光学变焦、数字放大或者其他高级成像技术来实现,从而确保目标细节的清晰可见性。
21、2、采用本发明方法,白天水尺拍清比例由20%提升至95%,夜间水尺拍清比例由不到10%提升至90%。
技术特征:
1.一种在航船舶水尺放大增强抓拍方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的在航船舶水尺放大增强抓拍方法,其特征在于,所述步骤1的具体过程如下:
3.根据权利要求2所述的在航船舶水尺放大增强抓拍方法,其特征在于,所述yolov5模型包括输入端、主干网络、neck网络和输出端;输入端采用mosaic数据增强,对包含水尺的船舶图像数据集进行随机缩放、随机裁剪和随机排布;主干网络包括focus模块和csp模块,focus模块用于对输入端数据增强后的图像进行聚焦和压缩,将高分辨率图像转化为低分辨率图像;输出端采用giou_loss损失函数,giou_loss损失函数的公式为:其中,iouloss为giou_loss损失,a为真实标签,b为预测标签。
4.根据权利要求1所述的在航船舶水尺放大增强抓拍方法,其特征在于,所述步骤2中,抓拍相机的像素为1920*1080,n不小于3,k的取值为1.18。
5.一种计算机设备,包括存储器、处理器,以及存储在所述存储器中并能够在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至4任一项所述的在航船舶水尺放大增强抓拍方法的步骤。
6.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至4任一项所述的在航船舶水尺放大增强抓拍方法的步骤。
技术总结
本发明公开了一种在航船舶水尺放大增强抓拍方法,包括:获取船舶水尺图像数据集,对yolov5模型进行训练,得到船舶水尺定位模型;在抓拍相机初始预设变倍Z0下,检测船舶在抓拍相机画面中的位置,对抓拍相机变倍进行第一次调整,根据第一次调整后的变倍对在航船舶进行抓拍;根据第一次调整变倍后抓拍到的船舶图像,利用训练得到的船舶水尺定位模型对在航船舶水尺进行定位,对抓拍相机变倍进行第二次调整,根据第二次调整后的变倍以及水尺定位对在航船舶水尺部位进行抓拍,从而得到船舶水尺放大增强图像。本发明通过高分辨率的成像和放大功能,允许抓拍者即使是在遥远的距离或者极度低光条件下也能精确地定位和观察目标。
技术研发人员:王晓春,周建武,杨正,姚夏晓,林盛梅,齐太顺,程思钦,刘邵钦,刘志荣,孙苏娟,欧阳文全
受保护的技术使用者:长江三峡通航管理局
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!