一种基于功率谱对消算法的无人机信号检测方法与流程
本发明涉及一种基于功率谱对消算法的无人机信号检测方法,无人机信号检测。
背景技术:
1、近年来,无人机技术逐渐成熟,在诸多行业中都有着显著的应用效果。与此同时,频谱资源日渐拥挤也使得无人机在某些应用场景下出现信号丢失等问题,轻则导致飞行任务受阻,重则出现摔机事故造成巨大的经济损失。在不同环境下测定并评估无人机信号强弱对无人机应用有着十分重大的意义。
2、无人机使用的跳频信号因其具有较强的抗干扰能力和较低的截获率,因此被广泛应用于通信、雷达等领域。但随着技术的发展,通信设备越来越多,电磁环境越来越复杂,导致无人机跳频信号的检测变得越来越困难。
技术实现思路
1、为了解决上述现有技术中存在的问题,本发明提出了一种基于功率谱对消算法的无人机信号检测方法。
2、本发明的技术方案如下:
3、一方面,本发明提供了一种基于功率谱对消算法的无人机信号检测方法,包括以下步骤:
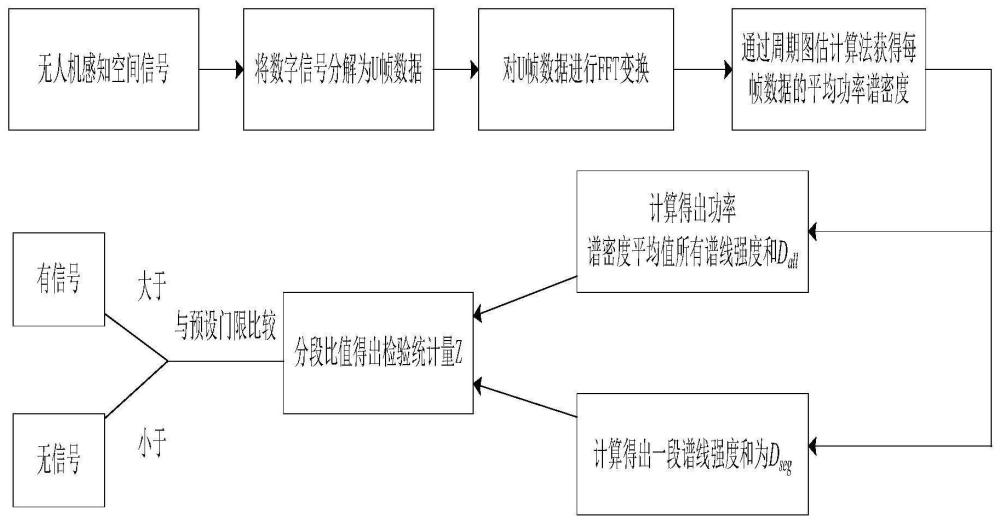
4、收集任一时间段内无人机在感知空间内的信号,将信号转换为数字信号,再将数字信号分解为多帧数据,通过周期图估计算法得到每帧数据的功率谱密度;
5、通过每帧数据的功率谱密度得到帧数据的平均功率谱密度,将平均功率谱密度分为多段,每段中包含多根谱线,计算每段谱线的强度和以及所有谱线的强度和;
6、将每段谱线的强度和与所有谱线的强度和进行分段对消,提取对消比值的最大值作为检验值;
7、预设检测门限值,收集无人机在该感知空间内多个时间段下的检验值,将每个时间段下的检验值与检测门限值进行对比,若检验值大于检测门限值则判断当前时刻无人机在该空间内有信号,反之则在该空间内没有信号,若无人机在该感知空间多个时间段下的检验值都大于检测门限值,则视为该感知空间适合无人机作业。
8、作为本发明的优选实施方式,所述每帧数据的功率谱密度的具体计算步骤为:
9、设任一时间段内无人机在感知空间内的信号为x(t),将信号转换为数字信号x(n),从数字信号序列种连续提取u帧数据,每帧的数据点为y,则第u帧数据为xu(n),其中n=0,1,…,y-1,u=1,2,…,u;
10、对每帧数据进行傅里叶变换,具体如下式所示:
11、
12、其中:xu(k)为傅里叶变换后的第u帧数据,k=0,1,…,y-1;
13、基于傅里叶变换后的每帧数据通过周期图估计算法获得每帧数据的功率谱密度:fu(k)=|xu(k)|2。
14、作为本发明的优选实施方式,所述帧数据的平均功率谱密度favg(k)计算公式为:
15、
16、其中:由于发射实信号的功率谱是对称的,所以每帧数据的功率谱只用正频率的点来表示。
17、作为本发明的优选实施方式,所述每段谱线的强度和以及所有谱线的强度和计算步骤为:
18、将u帧数据的平均功率谱密度分为l段,每段中包含t根谱线,则每段谱线的强度和dseg计算公式为:
19、
20、所有谱线的强度和dall计算公式为:
21、作为本发明的优选实施方式,所述检验值计算步骤为:
22、将每段谱线的强度和dseg与所有谱线的强度和dall进行分段对消,则通过下式计算得到每段谱线的强度和dseg与所有谱线的强度和dall的对消比值e(l):
23、
24、将对消比值的最大值z作为检验值:z=max(e(l))。
25、作为本发明的优选实施方式,所述预设的检测门限计算公式为:
26、设检测门限为γ,通过预设的虚警概率pf、帧数据长度u以及u帧数据的平均功率谱密度分段数l得到检测门限γ的计算公式:
27、
28、其中:ф-1为误差函数的逆函数。
29、另一方式,本发明还提供了一种基于功率谱对消算法的无人机信号检测系统,包括数据收集模块、数据处理模块以及无人机信号判断模块;
30、所述数据收集模块用于收集所有时间段下的无人机在感知空间内的信号;
31、所述数据处理模块用于将无人机信号转换为数字信号,再将数字信号分解为多帧数据,通过周期图估计算法得到每帧数据的功率谱密度,通过每帧数据的功率谱密度得到连续u帧数据的平均功率谱密度,将平均功率谱密度分为多段,每段中包含多根谱线,计算每段谱线的强度和以及所有谱线的强度和;
32、所述无人机信号判断模块用于将每段谱线的强度和与所有谱线的强度和进行分段对消,提取对消比值的最大值作为检验值,同时预设检测门限值,将每个时间段下的检验值与检测门限值进行对比,若检验值大于检测门限值则判断当前时刻无人机在该空间内有信号,反之则在该空间内没有信号,若无人机在该感知空间多个时间段下的检验值都大于检测门限值,则视为该感知空间适合无人机作业。
33、再一方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如本发明任一实施例所述的方法。
34、再一方面,本发明还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明任一实施例所述的方法。
35、本发明具有如下有益效果:
36、1、本发明所采用的功率谱对消检测算法对信号具有普适性,可用于各类信号的检测。信号检测方式简单直接,通过比较检验值与检测门限值,便可以判定检测信号的强弱。
技术特征:
1.一种基于功率谱对消算法的无人机信号检测方法,其特征在于从频域信号处理的角度,使用功率谱对消算法进行无人机信号检测,包括以下步骤:
2.根据权利要求1所述的一种基于功率谱对消算法的无人机信号检测方法,其特征在于,通过周期图估计算法获得每帧数据的功率谱密度,所述每帧数据的功率谱密度的具体计算步骤为:
3.根据权利要求1所述的一种基于功率谱对消算法的无人机信号检测方法,其特征在于对平均功率谱密度进行分段,所述帧数据的平均功率谱密度favg(k)计算公式为:
4.根据权利要求1所述的一种基于功率谱对消算法的无人机信号检测方法,其特征在于通过平均功率谱密度来得到每段谱线的强度和,所述每段谱线的强度和以及所有谱线的强度和计算步骤为:
5.根据权利要求1所述的一种基于功率谱对消算法的无人机信号检测方法,其特征在于,将每段谱线的强度和与所有谱线的强度和进行分段对消,所述检验值计算步骤为:
6.根据权利要求1所述的一种基于功率谱对消算法的无人机信号检测方法,其特征在于,设置设定检测门限,所述预设的检测门限计算公式为:
7.一种基于功率谱对消算法的无人机信号检测系统,其特征在于,从频域信号处理的角度对无人机信号进行检测,包括数据收集模块、数据处理模块以及无人机信号判断模块;
8.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述的方法。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1至6任一项所述的方法。
技术总结
本发明涉及一种基于功率谱对消算法的无人机信号检测方法,包括以下步骤:收集任一时间段内无人机在感知空间内的信号,先将信号转换为数字信号,再将数字信号分解为多帧数据,通过周期图估计算法得到每帧数据的功率谱密度;通过每帧数据的功率谱密度得到连续U帧数据的平均功率谱密度,将平均功率谱密度分为多段,每段中包含多根谱线,计算每段谱线的强度和以及所有谱线的强度和;将每段谱线的强度和与所有谱线的强度和进行分段对消,提取对消比值的最大值作为检验值;预设检测门限值,收集无人机在该感知空间内多个时间段下的检验值,将每个时间段下的检验值与检测门限值进行对比,若检验值大于检测门限值则判断当前时刻无人机在该空间内下有信号。
技术研发人员:吴文斌,韩腾飞,陈卓磊,梁曼舒,张伟豪,李哲舟,陈伯建,王仁书,阮莹,方超颖,王晓杰,许军,吴晓杰,傅智为
受保护的技术使用者:国网福建省电力有限公司电力科学研究院
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!