多相机对检测物跟踪方法与流程
本发明涉及检测跟踪,特别是涉及一种多相机对检测物跟踪方法。
背景技术:
1、跟踪特定的被摄体的同时进行连续摄影的跟踪摄影技术广泛使用于监视摄像机或通常的数码相机等领域。作为确定成为跟踪目标的特定被摄体的位置的方法,提出有各种方法,例如已知有通过对照跟踪目标的特征与摄影图像来确定图像内的跟踪目标的位置的方法。
2、但现有的各种物体检测跟踪方法中,容易出现跟踪错乱,当出现跟踪错乱时,后续的跟踪结果则相应出现错乱,导致整体的错乱出现。
技术实现思路
1、为解决上述问题,本发明解决了现有物料跟踪容易出现错乱的问题,通过定制相机的数据块,优化跟踪,对于相机系统可以做到单个跟踪,不影响后续跟踪结构,保证跟踪稳定性的多相机对检测物跟踪方法。
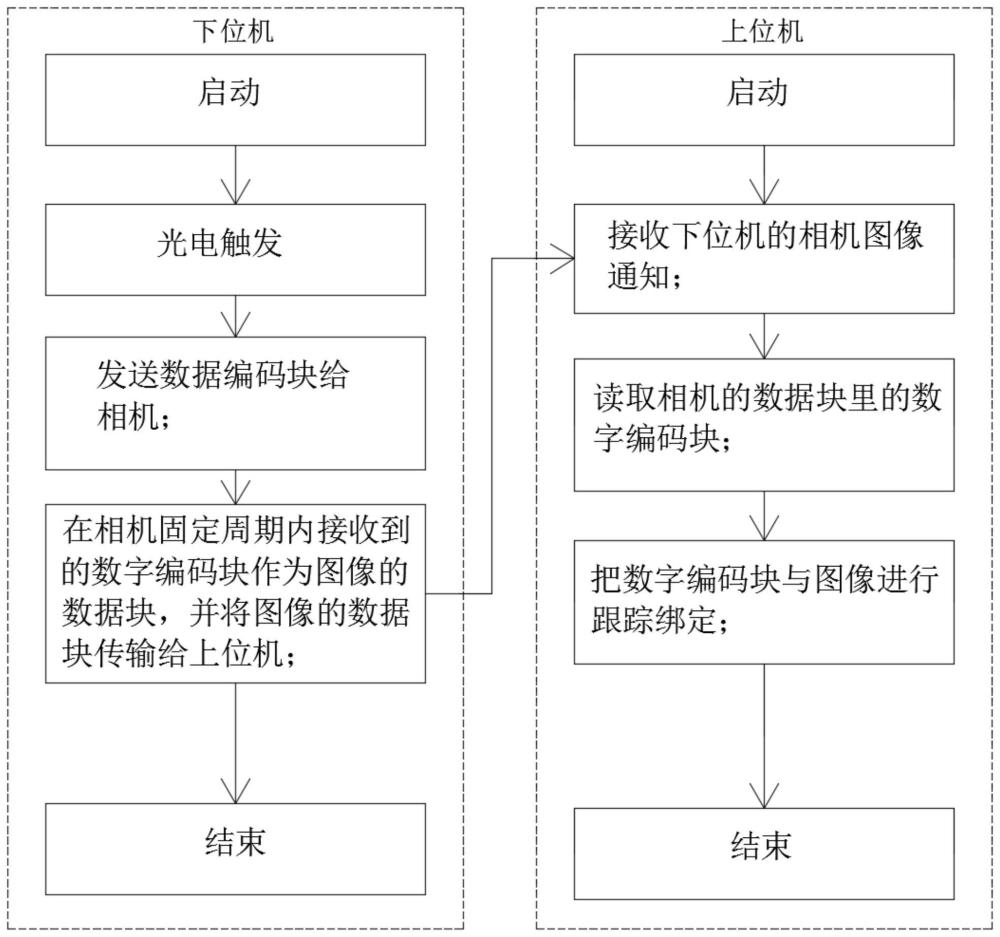
2、本发明所采用的技术方案是:一种多相机对检测物跟踪方法,包括下位机流程、上位机流程以及多个相机;
3、所述下位机流程包括如下步骤:
4、步骤s1,下位机启动;
5、步骤s2,触发光电感应;
6、步骤s3,发送数字编码块给到相机;
7、步骤s4,在相机固定周期内接收到的数字编码块作为图像的数据块,并将图像的数据块传输给上位机;
8、所述上位机流程包括如下步骤:
9、步骤s5,接收下位机的相机图像通知;
10、步骤s6,读取相机的数据块里的数字编码块;
11、步骤s7,把数字编码块与图像进行跟踪绑定。
12、对上述方案的进一步改进为,所述步骤s2中,触发光电感应是对被检测物触发,触发过程是检测到被检测物。
13、对上述方案的进一步改进为,所述步骤s3,发送数字编码块为发送bcd码。
14、对上述方案的进一步改进为,所述步骤s4,在相机固定周期内,发送10101010给相机,其中开始位为高,那么io状态为高、低、高、低、高、低、高、低····。
15、对上述方案的进一步改进为,所述步骤s4,在相机固定周期时间内,每位时间周期为xus/8;
16、当上述数据中x=200,则如下:
17、每位时间周期为200us/8=25us;
18、根据上述固定周期的时间内发送10101010给相机,其中开始位为高,那么io状态为高、低、高、低、高、低、高、低····。
19、对上述方案的进一步改进为,相机在接收到1时为拍照开始,那么后续7位数据则为这个图像的跟踪id。
20、对上述方案的进一步改进为,相机在得到跟踪id时,则把这个id作为当前图像的数据块,并通过数据块关联当前图像。
21、本发明有益效果是:
22、相比现有的物料检测跟踪,本发明采用的是上位机和下位机配合,在物料检测跟踪过程中,通过光电触发检测感应,将检测感应的数字编码块给到相机,并在相机的固定周期内接收的数字编码块作为图像的数据块,并将图像的数据块传输给上位机;上位机接收相机图像通知,读取相机的数据块内的数字编码块,把数字编码块与图像进行跟踪绑定。形成对物料的图像绑定跟踪。本发明中解决了现有物料跟踪容易出现错乱的问题,通过定制相机的数据块,优化跟踪,对于相机系统可以做到单个跟踪,不影响后续跟踪结构,保证跟踪稳定性。
技术特征:
1.一种多相机对检测物跟踪方法,其特征在于:包括下位机流程、上位机流程以及多个相机;
2.根据权利要求1所述的多相机对检测物跟踪方法,其特征在于:所述步骤s2中,触发光电感应是对被检测物触发,触发过程是检测到被检测物。
3.根据权利要求1所述的多相机对检测物跟踪方法,其特征在于:所述步骤s3,发送数字编码块为发送bcd码。
4.根据权利要求1所述的多相机对检测物跟踪方法,其特征在于:所述步骤s4,在相机固定周期内,发送10101010给相机,其中开始位为高,那么io状态为高、低、高、低、高、低、高、低····。
5.根据权利要求1所述的多相机对检测物跟踪方法,其特征在于:所述步骤s4,在相机固定周期时间内,每位时间周期为xus/8;
6.根据权利要求4或5所述的多相机对检测物跟踪方法,其特征在于:相机在接收到1时为拍照开始,那么后续7位数据则为这个图像的跟踪id。
7.根据权利要求6所述的多相机对检测物跟踪方法,其特征在于:相机在得到跟踪id时,则把这个id作为当前图像的数据块,并通过数据块关联当前图像。
技术总结
本发明涉及检测跟踪技术领域,特别是一种多相机对检测物跟踪方法,在物料检测跟踪过程中,通过光电触发感应,将感应的数字编码块给到相机,并在相机的固定周期内接收的数字编码块作为图像的数据块,并将图像的数据块传输给上位机;上位机接收相机图像通知,读取相机的数据块内的数字编码块,把数字编码块与图像进行跟踪绑定。形成对物料的图像绑定跟踪。本发明解决了现有物料跟踪容易出现错乱的问题,通过定制相机的数据块,优化跟踪,对于相机系统可以做到单个跟踪,不影响后续跟踪结构,保证跟踪稳定性。
技术研发人员:廖安华
受保护的技术使用者:广东盛治智能科技有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!