一种基于1588v2+同步以太网下从节点ptp引擎相位补偿方法与流程
本发明涉及网络授时技术,具体是一种基于1588v2+同步以太网下从节点ptp引擎的相位补偿方法。
背景技术:
1、高精度授时功能是高分组传送网ptn(packet transport network,简称ptn)网络的重要特性,利用ptn网络的开放性,在网络中运行1588v2协议不仅可以实现业务传输,还能实现网络时间同步传递,满足移动通信业务对时间同步的要求。基于ptn网络的时间同步,采用1588v2+同步以太网的方式已成为业界公认的技术手段。
技术实现思路
1、本发明的目的是针对现有技术的不足,而提供一种基于1588v2+同步以太网下从节点ptp引擎的相位补偿方法。这种方法能提高从节点与主节点的相位同步精度和相位短期稳定度。
2、实现本发明目的的技术方案是:
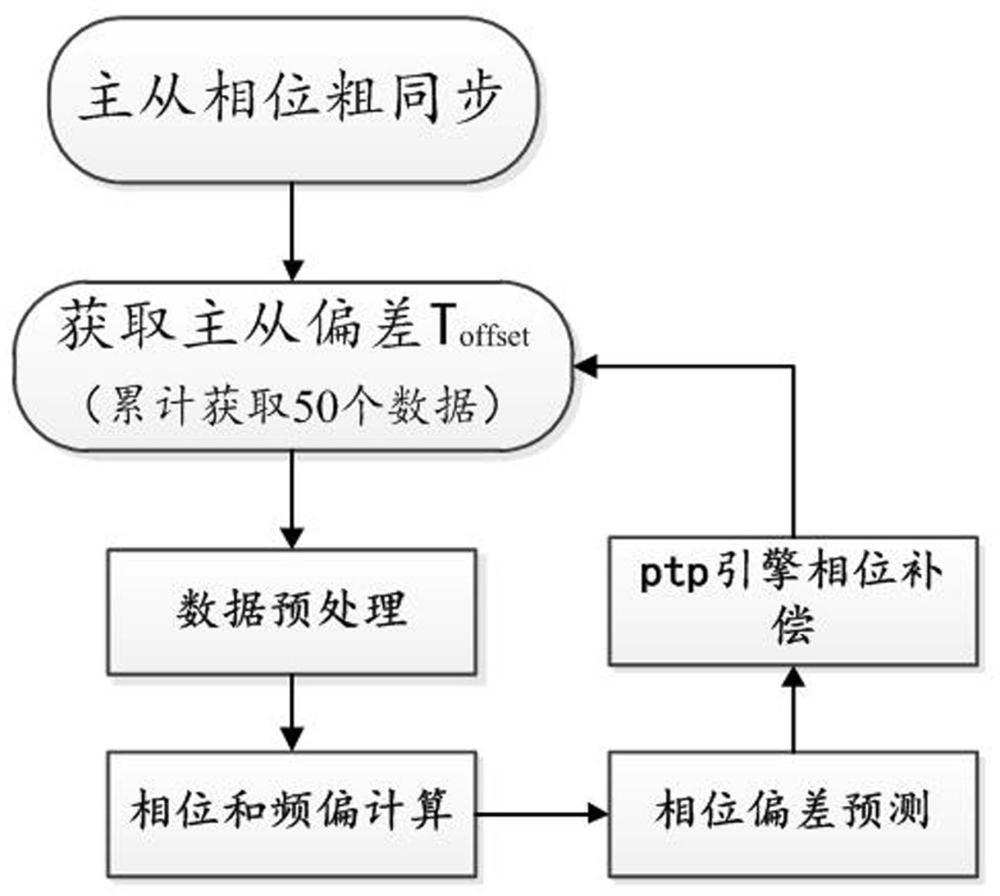
3、一种基于1588v2+同步以太网下从节点ptp引擎的相位补偿方法,包括如下步骤:
4、1)进行主从节点间的相位粗同步:进行主从节点间的相位粗同步首先需要采用1588v2协议获取主从节点的相位偏差toffset,1588v2协议的时间同步过程包括4种报文的交互过程:
5、1-1)主时钟节点发起同步请求报文sync,主时钟发起同步请求的同时,采用本地时钟作为参考,将sync报文发出的时刻打上硬件时间戳t1,并将时间戳记录在主时钟侧,从时钟节点接收到主时钟发来sync报文的时刻,记录此时的硬件时间戳t2;
6、1-2)主节点时钟在发送完sync报文后,紧接着会发送follow_up报文,follow_up报文携带时间戳信息t1;从节点时钟接收到follow_up报文后,将硬件时间戳t1保存;
7、1-3)从节点接收到主节点发送的follow_up报文后,紧接着发送delay_req报文,同时打下时间戳t3并保存;主节点接收到从节点的delay_req报文时,同时打下时间戳t4并保存;
8、1-4)主节点时钟打下时间戳t4后,向从节点发送delay_resp报文,delay_resp报文携带时间戳t4的信息,从节点接收到时间戳t4信息并记录;
9、经过4种报文在主从节点间的交互,从节点拥有了4个时间戳t1、t2、t3和t4的信息,假设主从节点间的时间偏差为toffset,报文传输延迟时间为tdelay,根据1588v2的同步过程得如下方程式:
10、
11、
12、从节点相对于主节点的相位偏差toffset=[(t1–t2)-(t3–t4)]/2,将toffset作为ptp引擎的相位调整量,完成主从节点间的相位粗同步;
13、2)获取50个主从节点的相位偏差toffset:从节点采用步骤1)中的1588v2协议连续获取50个相位偏差toffset,期间不对ptp引擎进行调整;
14、3)数据预处理:对步骤2)获取的50个数据进行数据预处理,剔除掉其中的异常数据:数据预处理的作用是进行粗差数据的剔除,采用3σ准则进行粗差剔除,设y1,y2,y3,…,y50表示在时刻x1,x2,x3…,x50采集到的50个主从相位偏差数据,相位偏差的变化是一个线性过程,则y=ax+b,从节点采集到50个数据后,采用最小二乘法求出a和b的值,同时遍历50个数据是否处于3σ准则的合理偏差范围内,不在范围内的采用预测值替换,完成数据预处理;
15、4)相位偏差和频率偏差计算:根据数据预处理的结果进行主从节点间的相位偏差和频率偏差计算,即采用一阶多项式的模型进行数据处理,实质是将幂函数作为拟合函数对时间间隔相等的钟差时间序列数据进行拟合,辨识参数为a0和a1,根据最小二乘估计原则求出a0和a1的值,相位差数据δt与系统时间t之间的关系用一阶多项式表示如公式(3)所示:
16、δt=a0+a1(t-t0)(3),
17、设相对于时间t1,t2,…,tn的相位差分别为:x1,x2,…,xn测量误差为vi,根据公式(3)建立钟差方程如公式(4)所示:
18、xi+vi=a0+a1(ti-t0)(4),
19、设分别是a0,和a1的估计值,则有如公式(5)所示:
20、
21、根据最小二乘估计原则,记令
22、
23、则估计值
24、其中,n为相位差数据的个数,δti=ti-t0,则当前频偏值当前的相位差值
25、5)预测50s后的相位偏差θy:根据主从节点间的相位偏差和频率偏差预测50s后的相位偏差θy,θy=(50*δf+δt);
26、6)δθ的相位补偿:根据θy给从节点ptp引擎进行δθ的相位补偿,具体为:
27、当|θy|<10时,ptp引擎的相位补偿量δθ=0;
28、当|θy|<20时,ptp引擎的相位补偿量δθ=-δt/3;
29、当|θy|<30时,ptp引擎的相位补偿量δθ=-δt/2;
30、当|θy|>30时,ptp引擎的相位补偿量δθ=-δt。
31、本技术方案具有下列优点:
32、引入补偿算法前,单次测量的toffset会引入很多随机误差,按单次测量的toffset值进行补偿反而会引起更大的偏差;引入补偿算法后,对随机误差进行了过滤,使相位的短期稳定度得到有效改善,降低了ptp引擎的调整频率,同时提高了授时的精度。
33、这种方法能提高从节点与主节点的相位同步精度和相位短期稳定度。
技术特征:
1.一种基于1588v2+同步以太网下从节点ptp引擎的相位补偿方法,其特征在于,包括如下步骤:
技术总结
本发明公开了一种基于1588v2+同步以太网下从节点ptp引擎的相位补偿方法,其特征在于,包括如下步骤:1)进行主从节点间的相位粗同步;2)获取50个主从节点的相位偏差T<subgt;offset</subgt;;3)数据预处理;4)相位偏差和频率偏差计算;5)预测50s后的相位偏差θ<subgt;y</subgt;;6)Δθ的相位补偿。这种方法能提高从节点与主节点的相位同步精度和相位短期稳定度。
技术研发人员:卢建福,程明,黄海洋,邱帆,郑鹏,黄柏华,蒋清宏
受保护的技术使用者:中国电子科技集团公司第三十四研究所
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!