一种电网巡检的无人机自主飞行监控方法及监控系统与流程
本申请涉及无人机自主飞行监控,尤其是涉及一种电网巡检的无人机自主飞行监控方法及监控系统。
背景技术:
1、电网在运行的过程中会出现线路接地引发触电事故和输电线路短路引跳闸等问题,因此,采用自主飞行的无人机对电网进行巡检,以尽早发现问题,避免电网运行过程中出现的问题引发严重事故,而无人机在自主飞行的过程容易接收到具有干扰信号的遥控信号,相关的传统技术无法实时判断出遥控信号中干扰信号的类别,导致难以及时消除干扰信号,使得电网巡检无人机在收到具有干扰信号的遥控信号后,难以顺利完成电网巡检任务,降低了电网巡检无人机的巡检效率。
技术实现思路
1、为了优化传统技术的相关技术方案,本申请提供一种电网巡检的无人机自主飞行监控方法及监控系统。
2、第一方面,本申请提供一种电网巡检的无人机自主飞行监控方法,可以包括以下步骤:
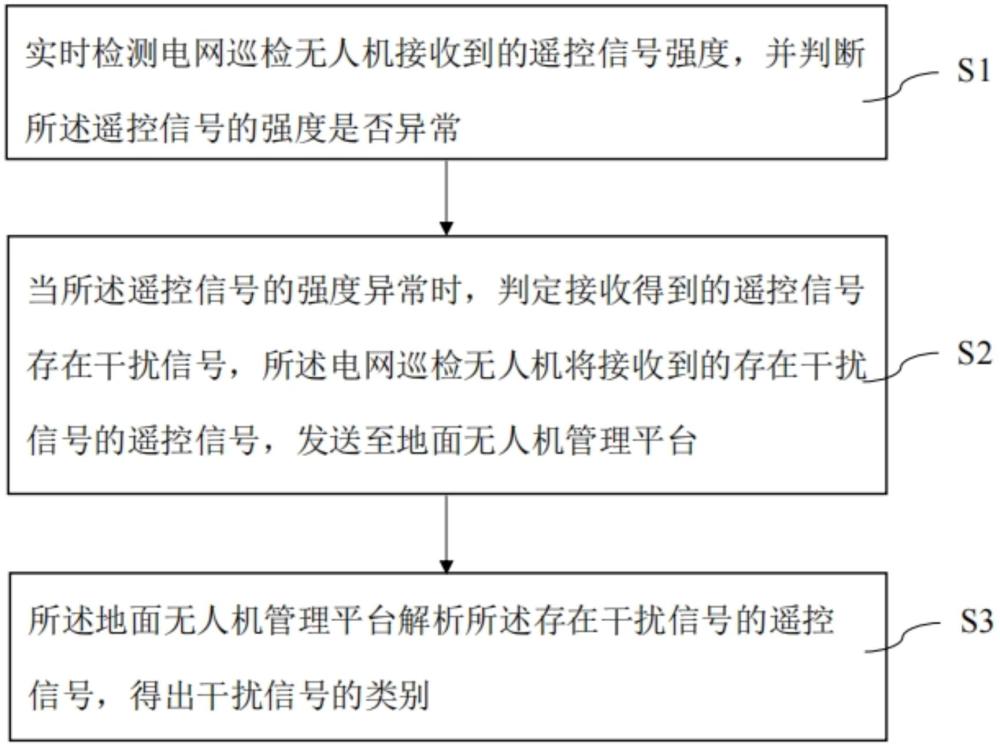
3、实时检测电网巡检无人机接收到的遥控信号强度,并判断所述遥控信号的强度是否异常;
4、当所述遥控信号的强度异常时,判定接收得到的遥控信号存在干扰信号,所述电网巡检无人机将接收到的存在干扰信号的遥控信号,发送至地面无人机管理平台;
5、所述地面无人机管理平台解析所述存在干扰信号的遥控信号,得出干扰信号的类别。
6、在上述技术方案中,可以实时判定遥控信号中干扰信号的类别,从而及时消除干扰信号,即使电网巡检无人机收到了具有干扰信号的遥控信号,依然能顺利完成电网巡检任务,有效提高了电网巡检无人机的巡检效率。
7、本申请第一方面的技术方案在一较佳示例中可以进一步配置为:
8、在实时检测电网巡检无人机接收到的遥控信号强度,并判断所述遥控信号的强度是否异常的步骤中,判断所述遥控信号的强度是否异常的方法包括以下步骤:
9、提取第时刻的遥控信号强度和第时刻的遥控信号强度;
10、运用以下表达式的计算结果,判断所述遥控信号的强度是否异常:
11、;
12、当满足上述表达式时,则判定所述遥控信号的强度异常,电网巡检无人机接收到的遥控信号存在干扰信号;
13、其中,为预先设定的遥控信号强度异常阈值,为遥控信号的时长,为第时刻的遥控信号强度系数,为第时刻的遥控信号强度系数,为正整数。
14、采用上述技术方案,通过检测电网巡检无人机接收到的遥控信号的强度是否异常,可以快速判断出电网巡检无人机接收到的遥控信号中是否存在干扰信号。
15、本申请第一方面的技术方案在一较佳示例中可以进一步配置为:
16、还包括以下步骤:
17、当所述地面无人机管理平台接收到电网巡检无人机发送的存在干扰信号的遥控信号时,重新发送相应的遥控信号给电网巡检无人机。
18、本申请第一方面的技术方案在一较佳示例中可以进一步配置为:
19、还包括以下步骤:
20、当所述地面无人机管理平台接收到电网巡检无人机发送的存在干扰信号的遥控信号时,所述地面无人机管理平台发送信息通知无人机管理工作人员及时消除干扰信号。
21、本申请第一方面的技术方案在一较佳示例中可以进一步配置为:
22、还包括以下步骤:
23、当所述干扰信号的类别为无人机机器故障时,所述地面无人机管理平台发送一架无人机接替出现机器故障的电网巡检无人机的电网巡检任务,并且,所述地面无人机管理平台发送信息通知无人机管理工作人员,回收出现机器故障的无人机。
24、本申请第一方面的技术方案在一较佳示例中可以进一步配置为:
25、所述地面无人机管理平台解析所述存在干扰信号的遥控信号,得出干扰信号的类别的步骤包括以下步骤:
26、分离出所述存在干扰信号的遥控信号中的干扰信号;
27、放大分离出的所述干扰信号;
28、所述分离出的干扰信号放大后通过以下表达式,得出干扰信号的类别:
29、;
30、其中,为第种类别干扰信号的能量,为第种类别干扰信号的占用带宽,为第种类别干扰信号的电平,为判定第种类别干扰信号的临界值最小值,为判定第种类别干扰信号的临界值最大值,为干扰信号的总类别数,为第种类别干扰信号的强弱系数,和均为正整数。
31、采用上述技术方案,可以快速判定干扰信号的类别,以便无人机管理工作人员可以尽快采用相应的措施,消除干扰信号,确保电网巡检无人机顺利完成巡检任务。
32、第二方面,本申请提供一种实现上述电网巡检的无人机自主飞行监控方法的监控系统,可以包括:
33、遥控信号强度检测装置,用于实时检测电网巡检无人机接收到的遥控信号强度,并判断所述遥控信号的强度是否异常;
34、遥控信号是否存在干扰判定装置,用于当所述遥控信号的强度异常时,判定接收得到的遥控信号存在干扰信号,所述电网巡检无人机将接收到的存在干扰信号的遥控信号,发送至地面无人机管理平台;
35、地面无人机管理平台,用于解析所述存在干扰信号的遥控信号,得出干扰信号的类别。
36、本申请第二方面的技术方案在一较佳示例中可以进一步配置为:
37、所述监控系统还可以包括:
38、遥控信号重发装置,用于当所述地面无人机管理平台接收到电网巡检无人机发送的存在干扰信号的遥控信号时,重新发送相应的遥控信号给电网巡检无人机。
39、本申请第二方面的技术方案在一较佳示例中可以进一步配置为:
40、所述监控系统还可以包括:
41、干扰信号消除装置,用于当所述地面无人机管理平台接收到电网巡检无人机发送的存在干扰信号的遥控信号时,所述地面无人机管理平台发送信息通知无人机管理工作人员及时消除干扰信号。
42、本申请第二方面的技术方案在一较佳示例中可以进一步配置为:
43、所述监控系统还可以包括:
44、机器故障无人机的接替与回收装置,用于当所述干扰信号的类别为无人机机器故障时,所述地面无人机管理平台发送一架无人机接替出现机器故障的电网巡检无人机的电网巡检任务,并且,所述地面无人机管理平台发送信息通知无人机管理工作人员,回收出现机器故障的无人机。
45、综上所述,相对于现有技术,本申请至少具有如下的有益效果:
46、1、本申请的电网巡检的无人机自主飞行监控方法及监控系统,可以实时判定遥控信号中干扰信号的类别,从而及时消除干扰信号,即使电网巡检无人机收到了具有干扰信号的遥控信号,依然能顺利完成电网巡检任务,有效提高了电网巡检无人机的巡检效率。
47、2、本申请的电网巡检的无人机自主飞行监控方法,可以快速判定电网巡检无人机接收到的遥控信号中是否存在干扰信号,如果存在干扰信号,还可以快速判定干扰信号的类别,以便可以尽快消除干扰信号,确保电网巡检无人机能够顺利完成巡检任务。
技术特征:
1.一种电网巡检的无人机自主飞行监控方法,其特征在于,包括以下步骤:
2.根据权利要求1所述电网巡检的无人机自主飞行监控方法,其特征在于,在实时检测电网巡检无人机接收到的遥控信号强度,并判断所述遥控信号的强度是否异常的步骤中,判断所述遥控信号的强度是否异常的方法包括以下步骤:
3.根据权利要求1所述电网巡检的无人机自主飞行监控方法,其特征在于,还包括以下步骤:
4.根据权利要求1所述电网巡检的无人机自主飞行监控方法,其特征在于,还包括以下步骤:
5.根据权利要求1所述电网巡检的无人机自主飞行监控方法,其特征在于,还包括以下步骤:
6.根据权利要求1所述电网巡检的无人机自主飞行监控方法,其特征在于,所述地面无人机管理平台解析所述存在干扰信号的遥控信号,得出干扰信号的类别的步骤包括以下步骤:
7.一种实现权利要求1所述电网巡检的无人机自主飞行监控方法的监控系统,其特征在于,包括:
8.根据权利要求7所述的监控系统,其特征在于,还包括:
9.根据权利要求7所述的监控系统,其特征在于,还包括:
10.根据权利要求7所述的监控系统,其特征在于,还包括:
技术总结
本申请公开了一种电网巡检的无人机自主飞行监控方法及监控系统,涉及无人机自主飞行监控技术领域,该监控方法包括以下步骤:实时检测电网巡检无人机接收到的遥控信号强度,并判断所述遥控信号的强度是否异常;当所述遥控信号的强度异常时,判定接收得到的遥控信号存在干扰信号,所述电网巡检无人机将接收到的存在干扰信号的遥控信号,发送至地面无人机管理平台;所述地面无人机管理平台解析所述存在干扰信号的遥控信号,得出干扰信号的类别。该监控系统包括:遥控信号强度检测装置、遥控信号是否存在干扰判定装置和地面无人机管理平台。本申请具有快速判断出干扰信号类别和提高了电网巡检机器人巡检效率等优点。
技术研发人员:王淼,汪骏,李加尧,李磊,叶剑锋,刘俊男,杜玉玺,马超,郑杰,于美妍,董晖,王宁,方平凯
受保护的技术使用者:国网电力空间技术有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!