基于5G的矿区无人运输系统及其矿卡铲车的协同控制方法与流程
本发明涉及采矿,具体为基于5g的矿区无人运输系统及其矿卡铲车的协同控制方法。
背景技术:
1、多种矿石位置的矿区不仅具有单一矿产资源的开采价值,还可以进行多种矿产资源的综合利用,提高经济效益和社会效益。一般来说,铜、铁、锌、铅等金属矿石在一起居多。这些金属矿石通常都是由于地质构造和成因相似而在同一地区形成的。
2、由于不同种类的矿石在矿区内的位置不均匀,有些区域可能富含某种矿石,而其他区域则较为稀少,因此在无人运输系统中的矿卡和铲车应用时,有的区域需要经常有矿车集中,频繁地来往运输,切换矿车消耗的时间会造成开采出来的矿石无法有效地载荷而堆积,且由于矿区崎岖的地形导致矿车磨损量大。因此,设计灵活调整的基于5g的矿区无人运输系统及其矿卡铲车的协同控制方法是很有必要的。
技术实现思路
1、本发明的目的在于提供基于5g的矿区无人运输系统及其矿卡铲车的协同控制方法,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:基于5g的矿区无人运输系统及其矿卡铲车的协同控制方法,无人运输系统包括作业车辆协同控制模块、开采速度测量模块,所述作业车辆协同控制模块与开采速度测量模块电连接;
3、所述作业车辆协同控制模块用于利用5g信号向作业车辆在矿区内发送协同控制的信号,所述开采速度测量模块用于根据作业车辆的协同控制信息计算各个开采区域的开采速度。
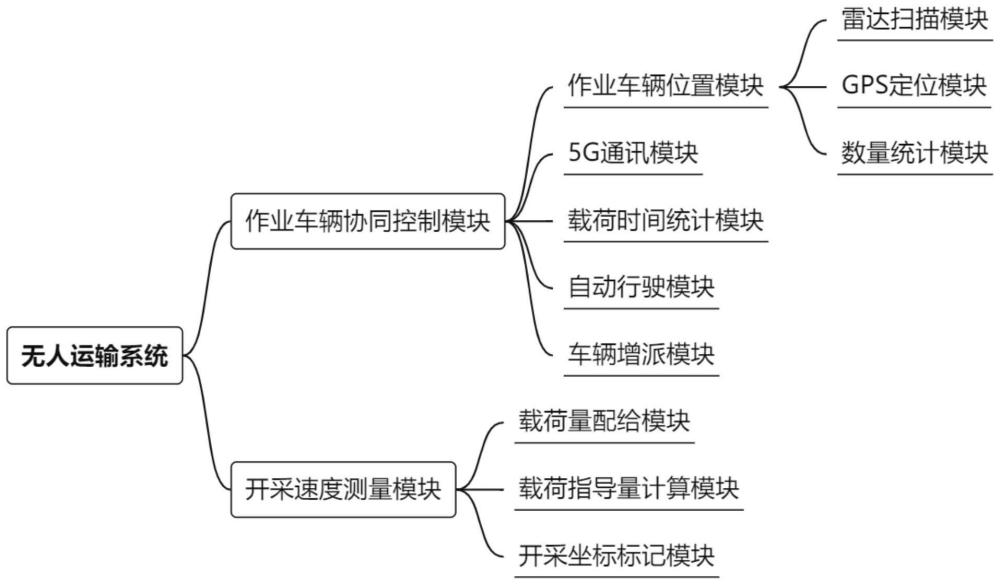
4、根据上述技术方案,所述作业车辆协同控制模块包括作业车辆位置模块、5g通讯模块和载荷时间统计模块、自动行驶模块、车辆增派模块,所述开采速度测量模块包括载荷量配给模块、载荷指导量计算模块和开采坐标标记模块;所述5g通讯模块与自动行驶模块电连接,所述作业车辆位置模块与自动行驶模块电连接,所述载荷时间统计模块与载荷指导量计算模块电连接;
5、所述作业车辆位置模块用于记录作业车辆在矿区内的位置情况,所述载荷时间统计模块用于记录作业车辆在矿区内各开采区域的载荷时间,所述载荷量配给模块用于根据各个作业车辆的额定载荷量对作业车辆后续工作的开采区域进行分配,所述开采坐标标记模块用于将开采区域的坐标进行标记,以便区分各个开采区域,所述载荷指导量计算模块用于判定开采区域的载荷指导量大小,以及是否达到临界值,所述5g通讯模块用于以5g通讯的方式发送控制各个作业车辆的信号,所述自动行驶模块用于控制各个作业车辆的进行路线,所述车辆增派模块用于根据当前开采区域的矿石堆积程度对开采区域增派作业车辆。
6、根据上述技术方案,该协同控制方法包括以下具体步骤:
7、s1、首先对每个开采区域分配若干个作业车辆,使得每个开采区域作业车辆平均额定载荷量相同,利用自动行驶控制各个作业车辆进入开采区域进行工作,当开采区域的矿石堆积到一定体积时则自动增派新的作业车辆,当作业车辆进入矿区的各个开采区域内,作业车辆位置模块记录开采区域当天工作的作业车辆数n,并且计算作业车辆在矿区内的位置情况,判断该矿区的集中区域和分散区域;
8、s2、通过载荷时间统计模块计算作业车辆在个区域的载荷时间t,通过载荷指导量计算模块计算各个开采区域的载荷指导量c,并判断否需要进行更换作业车辆的操作;
9、s3、当作业车辆进行更换操作时,通过开采坐标标记模块将需要分配的作业车辆派遣到开采区域进行载荷矿石的工作,使得开采区域内新的额定载荷量的作业车辆代替原有的作业车辆。
10、根据上述技术方案,所述作业车辆位置模块包括雷达扫描模块、gps定位模块、数量统计模块,所述雷达扫描模块与gps定位模块和数量统计模块电连接,所述载荷指导量计算模块与数量统计模块电连接;
11、所述雷达扫描模块用于通过毫米波雷达扫描绘制矿区里的作业车辆的外形,以及扫描开采区域堆积的待载荷矿石体积,所述gps定位模块用于对矿区里的作业车辆进行定位,所述数量统计模块用于判定各个开采区域内作业车辆出现的数量。
12、根据上述技术方案,上述步骤s1中,包括以下具体步骤:
13、s1-1、雷达扫描模块安放在矿区各处,当作业车辆进入矿区工作时,雷达扫描模块识别并绘制作业车辆的雷达图像,开采坐标标记模块对矿区建立坐标系,gps定位模块对该作业车辆进行定位,记录不同作业车辆在矿区里的移动路径,记录矿区各个开采区域进行载荷工作的作业车辆数量n(x,y);
14、s1-2、数量统计模块记录每天进入矿区的作业车辆数量n,数量统计模块统计过去h天内平均每天矿区的作业车辆数量:
15、
16、其中i为距今天数,i=1,2,3,……,h;n0为过去h天内平均每天矿区的作业车辆数量。
17、根据上述技术方案,上述步骤s1-2中,作业车辆位置模块计算开采区域不同区域的作业车辆集中度z,作业车辆集中度z具体为:
18、
19、当z超过作业车辆位置模块的临界值z0时,系统判断该坐标(x,y)处代表的开采区域为集中区域,否则为开采区域非集中区域。
20、根据上述技术方案,上述步骤s2中载荷指导量计算模块的具体工作过程包括以下步骤:
21、s2-1、载荷时间统计模块记录各作业车辆在各开采区域处的载荷时间t,并计算开采区域各处经过的总作业车辆载荷时间j=1,2,3,……,n(x,y);
22、s2-2、载荷指导量计算模块记录每天的作业车辆位置情况和载荷时间情况,并计算该开采区域每天的载荷指导量c。
23、根据上述技术方案,上述步骤s2-2中,载荷指导量c的计算方法为
24、
25、其中,α为载荷指导量的换算系数,为常数,当作业车辆集中度z越高时,意味着此开采区域的作业车辆来往频繁且开采区域的覆盖范围大,此时需要对此开采区域内的工作车辆调整至更大的额定载荷量以减少来往的矿车,当总作业车辆载荷时间越大时,则意味着需要更多时间才能将矿车装满,开采效率低,此时需要对此开采区域内的工作车辆调整至更小的额定载荷量。
26、与现有技术相比,本发明所达到的有益效果是:本发明,通过检测矿石开采区域的矿车集中活跃度和矿车的平均装载时间来计算载荷指导量,可以实时通过监测矿车的活动情况来对开采区域的作业车辆需求进行计算,无需等待矿石的称重结果,从而提高了计算载荷指导量的效率和准确性,并对载荷指导量大的开采区域分配载荷量较大的矿车,对载荷指导量小的开采区域分配载荷量小的矿车,帮助对后续的开采进行合理规划。
技术特征:
1.基于5g的矿区无人运输系统,其特征在于:所述无人运输系统包括作业车辆协同控制模块、开采速度测量模块,所述作业车辆协同控制模块与开采速度测量模块电连接;
2.根据权利要求1所述的基于5g的矿区无人运输系统,其特征在于:所述作业车辆协同控制模块包括作业车辆位置模块、5g通讯模块和载荷时间统计模块、自动行驶模块、车辆增派模块,所述开采速度测量模块包括载荷量配给模块、载荷指导量计算模块和开采坐标标记模块;所述5g通讯模块与自动行驶模块电连接,所述作业车辆位置模块与自动行驶模块电连接,所述载荷时间统计模块与载荷指导量计算模块电连接;
3.基于5g的矿区无人运输系统的矿卡铲车的协同控制方法,其特征在于:该协同控制方法包括以下具体步骤:
4.根据权利要求3所述的基于5g的矿区无人运输系统的矿卡铲车的协同控制方法,其特征在于:所述作业车辆位置模块包括雷达扫描模块、gps定位模块、数量统计模块,所述雷达扫描模块与gps定位模块和数量统计模块电连接,所述载荷指导量计算模块与数量统计模块电连接;
5.根据权利要求4所述的基于5g的矿区无人运输系统的矿卡铲车的协同控制方法,其特征在于:上述步骤s1中,包括以下具体步骤:
6.根据权利要求5所述的基于5g的矿区无人运输系统的矿卡铲车的协同控制方法,其特征在于:上述步骤s1-2中,作业车辆位置模块计算开采区域不同区域的作业车辆集中度z,作业车辆集中度z具体为:
7.根据权利要求6所述的基于5g的矿区无人运输系统的矿卡铲车的协同控制方法,其特征在于:上述步骤s2中载荷指导量计算模块的具体工作过程包括以下步骤:
8.根据权利要求7所述的基于5g的矿区无人运输系统的矿卡铲车的协同控制方法,其特征在于:上述步骤s2-2中,载荷指导量c的计算方法为
技术总结
本发明公开了基于5G的矿区无人运输系统及其矿卡铲车的协同控制方法,所述无人运输系统包括作业车辆协同控制模块、开采速度测量模块,所述作业车辆协同控制模块与开采速度测量模块电连接;所述作业车辆协同控制模块用于利用5G信号向作业车辆在矿区内发送协同控制的信号,所述开采速度测量模块用于根据作业车辆的协同控制信息计算各个开采区域的开采速度,所述作业车辆协同控制模块包括作业车辆位置模块、5G通讯模块和载荷时间统计模块、自动行驶模块、车辆增派模块,所述开采速度测量模块包括载荷量配给模块、载荷指导量计算模块和开采坐标标记模块;所述5G通讯模块与自动行驶模块电连接,本发明,具有灵活调整的特点。
技术研发人员:杨俊健
受保护的技术使用者:博睿斯数字能源(深圳)有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!