目标操作的执行方法、装置、存储介质及电子设备与流程
本发明涉及通信领域,具体而言,涉及一种目标操作的执行方法、装置、存储介质及电子设备。
背景技术:
1、相关技术中,在现场的机器人(主要包括机械臂和控制柜),操作人员有很多时候会需要连入机器人进而来执行一些操作,例如阅读一些机器人的相关信息,或者对机器人进行操作和调试等。不过操作人员就需要保证,通过客户端连接的控制柜就是想要执行上述操作的目标控制柜。
2、而相关技术中和控制柜(也叫控制器)的连接方式主要包括无线方式和有线方式。在连接方式是无线方式时,如果控制柜和无线保真(wireless fidelity,简称为wifi)的一一对应无法保证,那么上述操作的执行就会出现问题。在连接方式是有线方式时,示教器通过线缆连接到控制器;或者个人电脑(personal computer,简称为pc)通过网线连接到控制器。这种方式也需要复杂的确定控制柜的方案,操作繁琐。
3、针对相关技术中,无法快速获取待控制的控制柜的相关信息,进而无法对控制柜执行后续操作的方案的问题。目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种目标操作的执行方法、装置、存储介质及电子设备,以至少解决相关技术中,无法快速获取待控制的控制柜的相关信息,进而无法对控制柜执行后续操作的方案的技术问题。
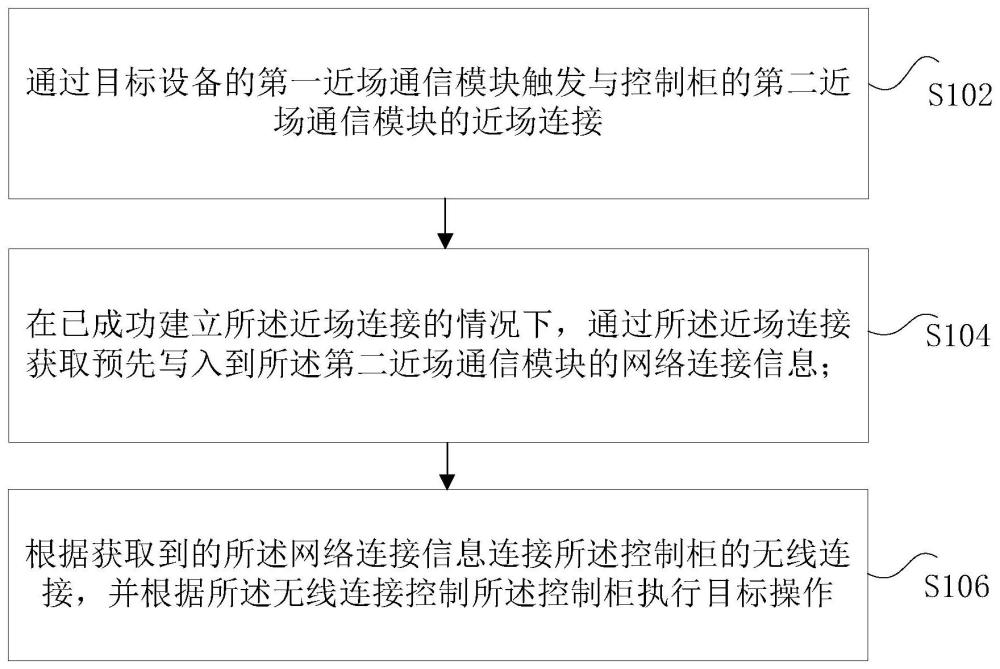
2、根据本发明实施例的一个方面,提供了一种目标操作的执行方法,包括:通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接;在已成功建立所述近场连接的情况下,通过所述近场连接获取预先写入到所述第二近场通信模块的网络连接信息;根据获取到的所述网络连接信息连接所述控制柜的无线连接,并根据所述无线连接控制所述控制柜执行目标操作。
3、在一个可选实施例中,通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接之前,所述方法还包括:在所述目标对象位于待操作区域的情况下,获取所述待操作区域存在的m个近场连接,其中,所述待操作区域包括n个控制柜,所述n个控制柜对应有n个近场连接,所述n和m均为正整数,所述m小于或等于所述n;从所述m个近场连接中确定目标近场连接,其中,所述目标近场连接是通过第二近场通信模块触发的近场连接。
4、在一个可选实施例中,获取检测所述待操作区域存在的m个近场连接之后,所述方法还包括:在所述m小于所述n的情况下,确定所述待操作区域中的k个控制柜,其中,所述k等于n和m的差值;接收所述k个控制柜分别发送的设置请求,其中,所述设置请求用于请求在所述k个控制柜中分别安装近场通信模块。
5、在一个可选实施例中,通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接之后,所述方法还包括:在已成功建立所述近场连接的情况下,通过所述近场连接获取与所述控制柜对应设置的机械臂的当前状态,其中,所述当前状态包括:当前姿态;根据所述当前状态向所述控制柜发送控制请求,其中,所述控制请求用于控制所述机械臂的当前姿态从第一姿态调整为第二姿态。
6、在一个可选实施例中,通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接之后,所述方法还包括:在已成功建立所述近场连接的情况下,通过所述近场连接获取预先写入到所述第二近场通信模块的校验码;将所述校验码转发至其他目标对象的移动终端,以指示所述其他对象的移动终端根据所述校验码校验通过对所述控制柜的控制权限。
7、在一个可选实施例中,通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接之后,所述方法还包括:在已成功建立所述近场连接的情况下,通过所述近场连接获取预先写入到所述第二近场通信模块的所述控制柜的管理对象的联系方式。
8、在一个可选实施例中,通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接,包括:确定所述第一近场通信模块和所述第二近场通信模块已被开启;在所述第一近场通信模块和所述第二近场通信模块均已被开启的情况下,通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接。
9、根据本发明的另一个方面,还提供了一种目标操作的执行装置,包括:触发模块,用于通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接;获取模块,用于在已成功建立所述近场连接的情况下,通过所述近场连接获取预先写入到所述第二近场通信模块的网络连接信息;控制模块,用于根据获取到的所述网络连接信息连接所述控制柜的无线连接,并根据所述无线连接控制所述控制柜执行目标操作。
10、根据本发明实施例的另一方面,提供了一种非易失性存储介质,所述非易失性存储介质存储有多条指令,所述指令适于由处理器加载并执行任意一项所述的目标操作的执行方法。
11、根据本发明实施例的另一方面,提供了一种电子设备,包括:一个或多个处理器和存储器,所述存储器用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现任意一项所述的目标操作的执行方法。
12、在本发明实施例中,通过移动终端和控制柜之间的近场通信连接,使得在移动终端和控制柜之间建立近场连接的情况下,就可以获取控制柜的相关信息,进而执行后边的上网操作等。采用上述技术方案,解决了相关技术中,无法快速获取待控制的控制柜的相关信息,进而无法对控制柜执行后续操作的方案的技术问题。
技术特征:
1.一种目标操作的执行方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接之前,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,获取检测所述待操作区域存在的m个近场连接之后,所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接之后,所述方法还包括:
5.根据权利要求1所述的方法,其特征在于,通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接之后,所述方法还包括:
6.根据权利要求1述的方法,其特征在于,通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接之后,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接,包括:
8.一种目标操作的执行装置,其特征在于,包括:
9.一种非易失性存储介质,其特征在于,所述非易失性存储介质存储有多条指令,所述指令适于由处理器加载并执行权利要求1至7中任意一项所述的目标操作的执行方法。
10.一种电子设备,其特征在于,包括:一个或多个处理器和存储器,所述存储器用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现权利要求1至7中任意一项所述的目标操作的执行方法。
技术总结
本发明公开了一种目标操作的执行方法、装置、存储介质及电子设备。该方法包括:通过目标设备的第一近场通信模块触发与控制柜的第二近场通信模块的近场连接;在已成功建立所述近场连接的情况下,通过所述近场连接获取预先写入到所述第二近场通信模块的网络连接信息;根据获取到的所述网络连接信息连接所述控制柜的无线连接,并根据所述无线连接控制所述控制柜执行目标操作。采用上述技术方案,解决相关技术中,无法快速获取待控制的控制柜的相关信息,进而无法对控制柜执行后续操作的方案的技术问题。
技术研发人员:戚祯祥,刑晓凡,杨帆,李顺冲
受保护的技术使用者:节卡机器人股份有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!