基于定位偏差识别的模块化机器人连接机构通讯方法
本发明属于机器人。
背景技术:
1、在自动化控制、机器人技术、智能运输系统等领域,精确的通讯与定位技术是至关重要的。特别是在复杂的工业环境中,需要高度精确的定位系统以确保机械装置的正确运作和有效通讯。目前,电永磁铁以其快速响应和高精度控制的优点,被广泛用于这些领域中,然而,传统通信手段是通过机械接口传输数据,接口长时间的使用和频繁的插拔经常造成接口的磨损和损坏,因此急需一种无接触式通讯方法,可以在设备之间自由地发送和接收数据,以便提高使用的便利性,但是现有基于电永磁体的无线通讯方式由于其接触存在偏差,导致存在通讯稳定性差的问题。
技术实现思路
1、本发明是为了解决现有模块化机器人连接机构采用电永磁体的无线通讯由于连接定位偏差大导致通讯稳定性差的问题,提出了基于定位偏差识别的模块化机器人连接机构通讯方法。
2、本发明所述基于定位偏差识别的模块化机器人连接机构通讯方法,该方法用于在所述基于模块化机器人连接机构间建立通信;所述模块化机器人连接机构基于电永磁铁连接,该方法通过所述电永磁铁进行通讯;
3、该方法包括:
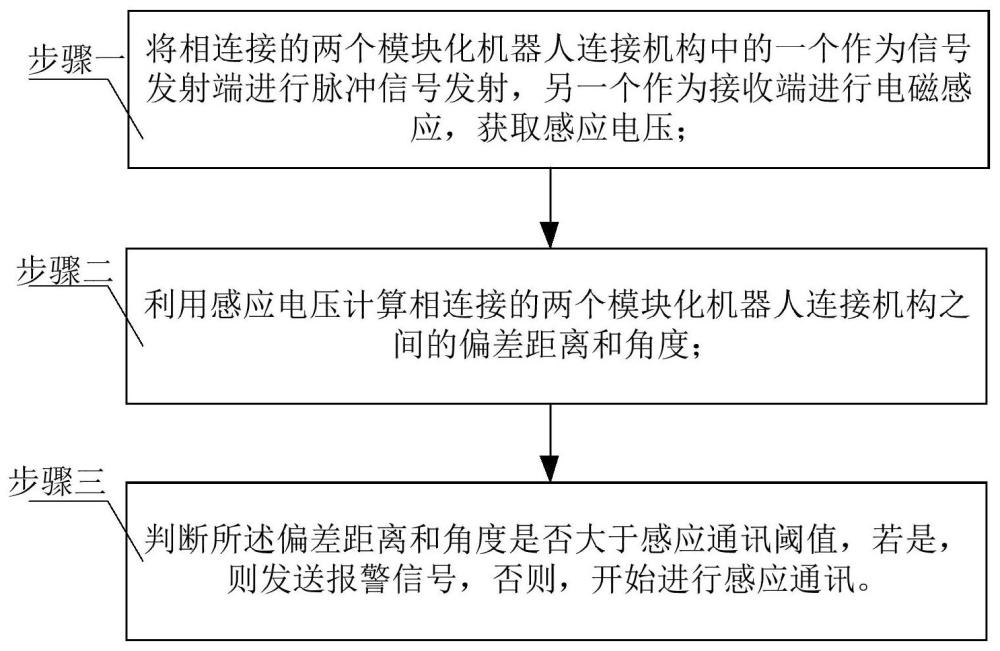
4、步骤一、将相连接的两个模块化机器人连接机构中的一个作为信号发射端进行脉冲信号发射,另一个作为接收端进行电磁感应,获取感应电压;
5、步骤二、利用感应电压计算相连接的两个模块化机器人连接机构之间的偏差距离和角度;
6、步骤三、判断所述偏差距离和角度是否大于感应通讯阈值,若是,则发送报警信号,否则,开始进行感应通讯。
7、进一步地,本发明中,步骤二中,利用感应电压计算相连接的两个模块化机器人连接机构之间的偏差距离和角度的方法为:
8、在两个模块化机器人连接机构的连接面上分别建立空间坐标系o1-x1y1z1和o2-x2y2z2;
9、坐标系o2-x2y2z2通过坐标系o1-x1y1z1沿着x1方向移动δdx,然后沿y1轴移动δdy,最后绕z2轴转动δθz;
10、坐标系转换矩阵t为:
11、
12、其中,txy代表沿x1,y1方向的平移矩阵,r(z2·δθz)代表绕z2轴转动δθz的旋转矩阵;m1点代表一个连接面上的一个电永磁铁的位置坐标点,向量表示在坐标系o1-x1y1z1对应连接面上一个电永磁铁的向量;m2点代表另一个连接面上与坐标点m1相对的电永磁铁的位置坐标点,向量表示在坐标系o2-x2y2z2对应连接面上电永磁铁的向量;是m2点在坐标系o1-x1y1z1下的向量;分别表示四个均布电永磁铁指向相对电永磁铁的空间向量;从空间几何关系推出:
13、
14、从而获得等式:
15、
16、进而得到方程:
17、
18、
19、
20、因此,获得模块组精确对接偏差δdx、δdy、δθz;其中,参数r表示均布磁铁半径,为已知量。
21、进一步地,本发明中,步骤三中,进行感应通讯的方法为:
22、采用串口通信协议进行信号脉冲信号发送,所述脉冲信号包括一个完整的字节数据,其中一位起始位、八位数据位、一位停止位。
23、进一步地,本发明中,八位数据位中,每个数据位为100us,每个数据位的前10us为脉冲产生段,在脉冲产生段时间内发送端发送脉冲或接收端接收到感应电压,则为1,否则为0。
24、进一步地,本发明中,感应通讯的传输波特率为10000bps。
25、进一步地,本发明中,步骤三中,感应通讯阈值为2mm,角度阈值为1°。
26、本发明所述方法不仅能够实现无接触式通讯,还能够实时识别和校正定位过程中的偏差,大幅提高定位的准确性。模块化机器人依靠本发明的方法保证了模块间的通讯的稳定,同时定位偏差识别有效的保证机械臂的连接稳定,同时避免连接偏差影响为自动化控制系统提供更为可靠和精确的技术支持。
技术特征:
1.基于定位偏差识别的模块化机器人连接机构通讯方法,其特征在于,该方法用于在所述基于模块化机器人连接机构间建立通信;所述模块化机器人连接机构基于电永磁铁连接,该方法通过所述电永磁铁进行通讯;
2.根据权利要求1所述的基于定位偏差识别的模块化机器人连接机构通讯方法,其特征在于,步骤二中,利用感应电压计算相连接的两个模块化机器人连接机构之间的偏差距离和角度的方法为:
3.根据权利要求2所述的基于定位偏差识别的模块化机器人连接机构通讯方法,其特征在于,步骤三中,进行感应通讯的方法为:
4.根据权利要求3所述的基于定位偏差识别的模块化机器人连接机构通讯方法,其特征在于,八位数据位中,每个数据位为100us,每个数据位的前10us为脉冲产生段,在脉冲产生段时间内发送端发送脉冲或接收端接收到感应电压,则为1,否则为0。
5.根据权利要求4所述的基于定位偏差识别的模块化机器人连接机构通讯方法,其特征在于,感应通讯的传输波特率为10000bps。
6.根据权利要求1、2、3或4所述的基于定位偏差识别的模块化机器人连接机构通讯方法,其特征在于,步骤三中,感应通讯阈值为2mm,角度阈值为1°。
技术总结
基于定位偏差识别的模块化机器人连接机构通讯方法,属于机器人技术领域。本发明解决了现有模块化机器人连接机构采用电永磁体的无线通讯由于连接定位偏差大导致通讯稳定性差的问题。本发明将相连接的两个模块化机器人连接机构中的一个作为信号发射端进行脉冲信号发射,另一个作为接收端进行电磁感应,获取感应电压;利用感应电压计算相连接的两个模块化机器人连接机构之间的偏差距离和角度;判断所述偏差距离和角度是否大于感应通讯阈值,若是,则发送报警信号,否则,开始进行感应通讯。本发明适用于模块化连接机构通讯与连接偏差计算。
技术研发人员:朱延河,韩凯,郑天骄,赵思恺,杨致远,赵杰,王海春
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!