用于输电线路无人机巡检的云-边任务分配方法及设备与流程
本发明涉及无人机巡检的,具体涉及用于输电线路无人机巡检的云-边任务分配方法及设备。
背景技术:
1、在输电线路巡检过程中,由于巡检任务较多(包括:螺栓松动、绝缘子故障、鸟巢等),无人机往往部署了多种深度神经网络模型以应对不同的巡检任务;同时,由于输电线路上的缺陷往往较为紧急,该巡检对实时性往往也有较高要求。
2、现有技术中,为了保证无人机的续航,旋翼无人机往往搭载的处理器能力都有限,难以完全支撑多种深度神经网络模型同时运行;此外,由于巡检过程中网络通信质量难以保证,导致难以支撑将图像完整、实时传输至地面做缺陷识别。
技术实现思路
1、有鉴于此,有必要针对的问题,提供用于输电线路无人机巡检的云-边任务分配方法及设备。
2、本发明提供了用于输电线路无人机巡检的云-边任务分配方法,包括:
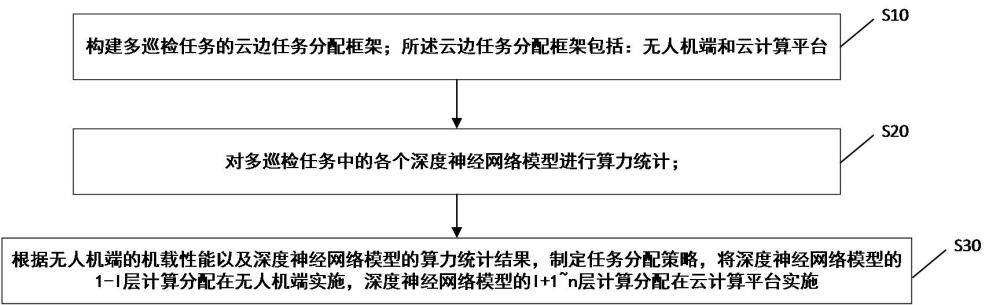
3、s10,构建多巡检任务的云边任务分配框架;所述云边任务分配框架包括:无人机端和云计算平台;其中,每个巡检任务均对应有相应的深度神经网络模型;
4、s20,对多巡检任务中的各个深度神经网络模型进行算力统计;
5、s30,根据无人机端的机载性能以及深度神经网络模型的算力统计结果,制定任务分配策略,将深度神经网络模型的层计算分配在无人机端实施,深度神经网络模型的层计算分配在云计算平台实施;
6、其中,所述n为深度神经网络模型的总层数,为根据任务分配策略得到的深度神经网络模型执行任务时最佳分界层。
7、本发明还提供了用于输电线路无人机巡检的云-边任务分配系统,包括:
8、构建模块,用于构建多巡检任务的云边任务分配框架;其中,每个巡检任务均对应有相应的深度神经网络模型;所述云边任务分配框架包括:无人机端和云计算平台;
9、算力统计模块,用于对多巡检任务中的各个深度神经网络模型进行算力统计;
10、策略制定模块,用于根据无人机端的机载性能以及深度神经网络模型的算力统计结果,制定任务分配策略,将深度神经网络模型的层计算分配在无人机端实施,深度神经网络模型的 层计算分配在云计算平台实施;
11、其中,所述n为深度神经网络模型的总层数,为根据任务分配策略得到的深度神经网络模型执行任务时最佳分界层。
12、本发明还提供了一种电子设备,包括:
13、存储器;
14、处理器;
15、以及计算机程序;
16、其中,所述计算机程序存储在所述存储器中,并被配置为由所述处理器执行以实现如上所述的方法。
17、本发明还提供了一种计算机可读存储设备,其上存储有计算机程序;所述计算机程序被处理器执行以实现如上所述的方法。
18、本申请提供的技术方案的优点在于:
19、1、本申请中,能够根据无人机端的机载性能以及深度神经网络模型的算力统计结果制定实时性的任务分配策略,使得无人机端在执行巡检任务的过程中,将巡检任务所需深度神经网络模型的计算任务动态、科学的分配至云计算平台及无人机端,使深度神经网络模型计算任务的其中一部分在无人机端进行、另一部分在地面的云计算平台进行,能够有效提升无人机在输电线路巡检过程中的数据处理精度和稳定性,提高整体巡检效果,实用性极强。
20、2、本申请采用了云-边的计算架构,能够减少无人机端的运算量,进而提升无人机整体续航,同时也综合利用了地面上云计算平台的算力,提升了硬件利用效率,最大化现场设备的效能。
技术特征:
1.用于输电线路无人机巡检的云-边任务分配方法,其特征在于,包括:
2.根据权利要求1所述的用于输电线路无人机巡检的云-边任务分配方法,其特征在于,所述无人机端的机载性能包括:无人机端的gpu显存和网络带宽;
3.根据权利要求2所述的用于输电线路无人机巡检的云-边任务分配方法,其特征在于,所述任务分配策略包括:
4.根据权利要求3所述的用于输电线路无人机巡检的云-边任务分配方法,其特征在于,通过强化学习框架进行任务分配策略的计算。
5.根据权利要求4所述的用于输电线路无人机巡检的云-边任务分配方法,其特征在于,所述强化学习框架包括:智能体和环境;
6.根据权利要求5所述的用于输电线路无人机巡检的云-边任务分配方法,其特征在于,所述状态中的各参数之间具有约束条件;
7.根据权利要求5所述的用于输电线路无人机巡检的云-边任务分配方法,其特征在于,所述奖励的函数表达式为:
8.用于输电线路无人机巡检的云-边任务分配系统,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储设备,其特征在于,其上存储有计算机程序;所述计算机程序被处理器执行以实现如权利要求1至8任一项所述的方法。
技术总结
本申请提供的用于输电线路无人机巡检的云‑边任务分配方法及设备;包括:S10,构建多巡检任务的云边任务分配框架;所述云边任务分配框架包括:无人机端和云计算平台;其中,每个巡检任务均对应有相应的深度神经网络模型;S20,对多巡检任务中的各个深度神经网络模型进行算力统计;S30,根据无人机端的机载性能以及深度神经网络模型的算力统计结果,制定任务分配策略,将深度神经网络模型的层计算分配在无人机端实施,深度神经网络模型的层计算分配在云计算平台实施;其中,所述n为深度神经网络模型的总层数,为根据任务分配策略得到的深度神经网络模型执行任务时最佳分界层;具有提高整体巡检效果的有益效果;适用于无人机巡检的技术领域。
技术研发人员:潘可达,黄楚茵,陈静川,陈博帆,吴俊臣,程天宇,高堃植
受保护的技术使用者:南方电网通用航空服务有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!