一种自动驾驶数据包的网页端回放方法及云平台与流程
本公开涉及无人驾驶,尤其涉及一种自动驾驶数据包的网页端回放方法及云平台。
背景技术:
1、无人车作业时,通常依靠自身的自动驾驶系统(包括感知设备、定位设备、策略规划模块等)探测周围环境数据,基于这些环境数据进行策略规划,完成无人驾驶作业。在一些情况下,工作人员希望了解无人车的作业情况,就需要将无人车作业过程中自动驾驶系统产生的数据包加载到网页(web)端进行回放。
2、但是,自动驾驶系统运行时平均每秒产生27mb左右的数据,如果需要在web端流畅回放这些数据包,单个主机的网络带宽至少需要27mb以上,对带宽的要求极高。对于日常5mb左右带宽来说,网络带宽和数据包传输之间存在22mb的缺口。因此基于web的方式回放自动驾驶系统产生的数据包会因为带宽不足存在严重的卡顿。
3、相关技术中,自动驾驶数据包在web端回放的方式是通过增加公网带宽或者将自动驾驶数据包和web端主机设置在同一局域网内才能流畅的回放,但是不管是增加带宽还是使用局域网的方式,对回放环境要求高,很多不具备条件的web端无法实现自动驾驶数据包回放,这种回放方案不具备普适性,回放效率低。
技术实现思路
1、本公开实施例提供了一种自动驾驶数据包的网页端回放方法及云平台,用以解决现有的回放自动驾驶数据包的方法普适性差,回放效率低的问题。
2、基于上述问题,第一方面,提供一种自动驾驶数据包的网页端回放方法,包括:
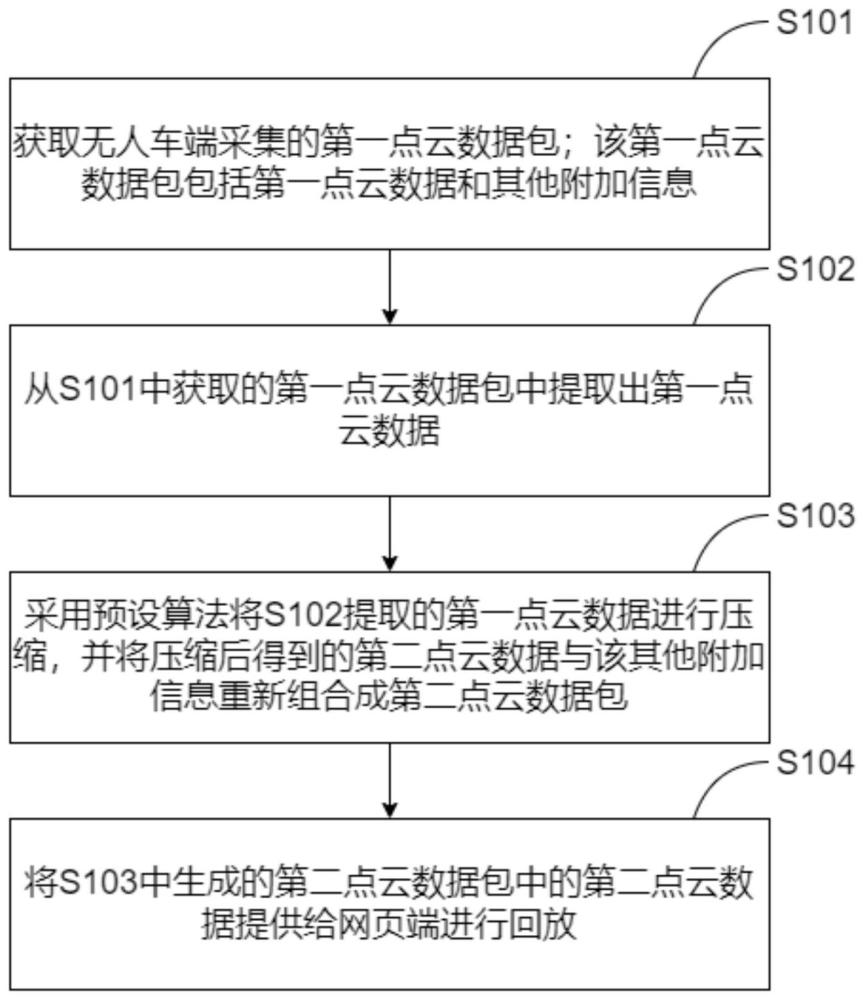
3、获取无人车端采集的第一点云数据包;所述第一点云数据包包括第一点云数据和其他附加信息;
4、从所述第一点云数据包中提取出第一点云数据;
5、采用预设算法将所述第一点云数据进行压缩,并将压缩后得到的第二点云数据与所述其他附加信息重新组合成第二点云数据包;
6、将所述第二点云数据提供给网页端进行回放。
7、结合第一方面,在一种可能的实施方式中,采用预设算法将所述第一点云数据进行压缩,并将压缩后得到的第二点云数据与所述其他附加信息重新组合成第二点云数据包,包括:将立体空间中的第一点云数据切分成多个预设大小的体素;针对每个体素,基于该体素中包含的点云点坐标确定该体素的重心点坐标;将确定的各体素中除重心点之外的点云点去除,并将各重心点构成的点云数据确定为第二点云数据;将所述第二点云数据与所述其他附加信息重新组合,得到所述第二点云数据包。
8、结合第一方面,在一种可能的实施方式中,针对每个体素,基于该体素中包含的点云点坐标确定该体素的重心点坐标,包括:针对每个体素,根据该体素包含的点云点的各个维度坐标,确定各个点云点在每一维度坐标的平均值;并将各维度坐标的平均值确定为该体素的重心点坐标。
9、结合第一方面,在一种可能的实施方式中,所述体素的预设大小为0.9m×0.9m×0.9m。
10、结合第一方面,在一种可能的实施方式中,在从所述第一点云数据包中提取出第一点云数据之前,还包括:接收所述网页端发送的点云数据获取请求。
11、第二方面,提供一种云平台,包括:
12、获取模块,用于获取无人车端采集的第一点云数据包;所述第一点云数据包包括第一点云数据和其他附加信息;
13、点云提取模块,用于从所述第一点云数据包中提取出第一点云数据;
14、点云压缩模块,用于采用预设算法将所述第一点云数据进行压缩,并将压缩后得到的第二点云数据与所述其他附加信息重新组合成第二点云数据包;
15、通信模块,用于将所述第二点云数据提供给网页端进行回放。
16、结合第二方面,在一种可能的实施方式中,所述点云压缩模块,用于将立体空间中的第一点云数据切分成多个预设大小的体素;针对每个体素,基于该体素中包含的点云点坐标确定该体素的重心点坐标;将确定的各体素中除重心点之外的点云点去除,并将各重心点构成的点云数据确定为第二点云数据;将所述第二点云数据与所述其他附加信息重新组合,得到所述第二点云数据包。
17、结合第二方面,在一种可能的实施方式中,所述点云压缩模块,用于针对每个体素,根据该体素包含的点云点的各个维度坐标,确定各个点云点在每一维度坐标的平均值;并将各维度坐标的平均值确定为该体素的重心点坐标。
18、结合第二方面,在一种可能的实施方式中,所述体素的预设大小为0.9m×0.9m×0.9m。
19、结合第二方面,在一种可能的实施方式中,所述通信模块,还用于在从所述第一点云数据包中提取出第一点云数据之前,接收所述网页端发送的点云数据获取请求。
20、本公开实施例的有益效果包括:
21、本公开实施例提供的一种自动驾驶数据包的网页端回放方法及云平台,包括:获取无人车端采集的第一点云数据包;第一点云数据包包括第一点云数据和其他附加信息;从第一点云数据包中提取出第一点云数据;采用预设算法将第一点云数据进行压缩,并将压缩后得到的第二点云数据与该其他附加信息重新组合成第二点云数据包;将第二点云数据提供给网页端进行回放。本公开实施例提供的一种自动驾驶数据包的网页端回放方法,将第一点云数据包中的数据部分提取并压缩,基于压缩后得到的第二点云数据生成新的第二点云数据包,并提供网页端播放。这样,经过预设算法压缩能够灵活控制第二点云数据包的大小,使其符合网页端回放的带宽要求,网页端通过正常的网络带宽就能够实现点云数据包的实时加载流畅播放,与相关技术中,对回放环境的高要求相比更加具有普适性,提高了回放效率。
技术特征:
1.一种自动驾驶数据包的网页端回放方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,采用预设算法将所述第一点云数据进行压缩,并将压缩后得到的第二点云数据与所述其他附加信息重新组合成第二点云数据包,包括:
3.如权利要求2所述的方法,其特征在于,针对每个体素,基于该体素中包含的点云点坐标确定该体素的重心点坐标,包括:
4.如权利要求2或3所述的方法,其特征在于,所述体素的预设大小为0.9m×0.9m×0.9m。
5.如权利要求1-3任一项所述的方法,其特征在于,在从所述第一点云数据包中提取出第一点云数据之前,还包括:
6.一种云平台,其特征在于,包括:
7.如权利要求6所述的云平台,其特征在于,所述点云压缩模块,用于将立体空间中的第一点云数据切分成多个预设大小的体素;针对每个体素,基于该体素中包含的点云点坐标确定该体素的重心点坐标;将确定的各体素中除重心点之外的点云点去除,并将各重心点构成的点云数据确定为第二点云数据;将所述第二点云数据与所述其他附加信息重新组合,得到所述第二点云数据包。
8.如权利要求7所述的云平台,其特征在于,所述点云压缩模块,用于针对每个体素,根据该体素包含的点云点的各个维度坐标,确定各个点云点在每一维度坐标的平均值;并将各维度坐标的平均值确定为该体素的重心点坐标。
9.如权利要求7或8所述的云平台,其特征在于,所述体素的预设大小为0.9m×0.9m×0.9m。
10.如权利要求6-8任一项所述的云平台,其特征在于,所述通信模块,还用于在从所述第一点云数据包中提取出第一点云数据之前,接收所述网页端发送的点云数据获取请求。
技术总结
本公开提供了一种自动驾驶数据包的网页端回放方法及云平台,包括:获取无人车端采集的第一点云数据包;第一点云数据包包括第一点云数据和其他附加信息;从第一点云数据包中提取出第一点云数据;采用预设算法将第一点云数据进行压缩,并将压缩后得到的第二点云数据与该其他附加信息重新组合成第二点云数据包;将第二点云数据提供给网页端进行回放。与相关技术中,对回放环境的高要求相比更加具有普适性,提高了回放效率。
技术研发人员:王博,王亚平,贺斌
受保护的技术使用者:北京易控智驾科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!