应用于晶圆预对准的数据采集方法、装置、设备和介质与流程
本发明涉及半导体制造领域,尤其涉及一种应用于晶圆预对准的数据采集方法、装置、设备和介质。
背景技术:
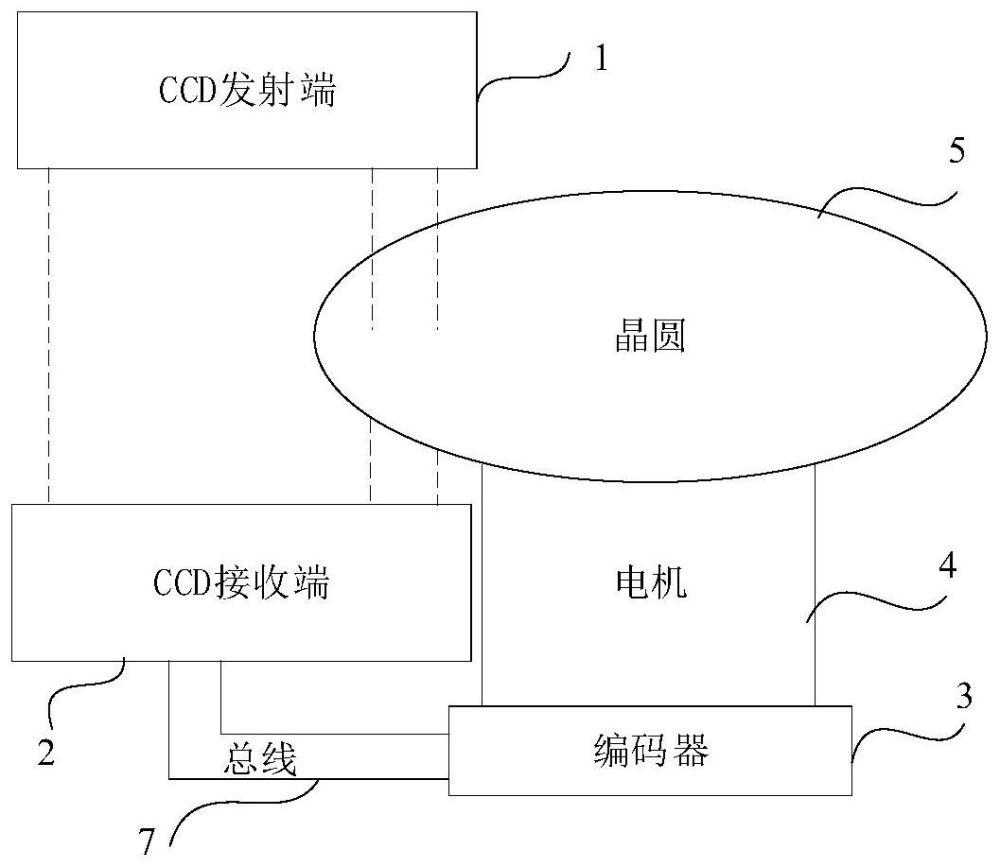
1、目前,晶圆预对准时的数据采集方式多为总线读取编码器值,读取电荷耦合器件图像传感器(charge coupled device,ccd)的数值,如图1所示,如果晶圆盒旋转电机有偏心的情况,在电机旋转的过程中晶圆遮挡ccd时编码器获取的光强值会有变化。
2、但此方式读取到的光强值与晶圆角度数据的同步实时性较差,因为总线周期一般选用4ms至16ms,而晶圆角度数据可能是0ms读到的,光强值可能是16ms读到的,这样无法保证当前光强值与晶圆角度数据在时间上的一致性,导致晶圆对准出现偏差。因此,亟需一种新型的应用于晶圆预对准的数据采集方法、装置、设备和介质以改善上述问题。
技术实现思路
1、本发明的目的在于提供一种应用于晶圆预对准的数据采集方法、装置、设备和介质,该方法用于提升晶圆对准的准确性。
2、第一方面,本发明提供一种应用于晶圆预对准的数据采集方法,包括:s1,获取晶圆触发的第一脉冲信号;s2,当获取到上位机输出的开始采集指令时,开始对所述第一脉冲信号做分频处理,以获得第二脉冲信号;s3,以所述第二脉冲信号作为触发信号,采集图像传感器输出的模拟量数值;所述模拟量数值对应图像传感器被晶圆遮挡的感光区域尺寸。
3、本发明的方法有益效果为:本发明通过获取晶圆触发的第一脉冲信号;当获取到上位机输出的开始采集指令时,开始对第一脉冲信号做分频处理,以获得第二脉冲信号;以第二脉冲信号作为触发信号,采集图像传感器输出的模拟量数值。本发明由第二脉冲信号作为触发来采集图像传感器输出的模拟量数值,所述模拟量数值能够更准确的对应晶圆当前的转动角度,保证了数据的真实性,使得晶圆对准时的计算结果更加准确。
4、可选的,还包括:s4,当所述晶圆旋转一周后,将所述模拟量数值转换为数字量数值,根据所述数字量数值计算晶圆的偏心距离。
5、可选的,所述当获取到上位机输出的开始采集指令时,开始对所述第一脉冲信号做分频处理,以获得第二脉冲信号,包括:获取晶圆的转动周期,根据所述转动周期计算分频数值n,n为正整数;将所述第一脉冲信号的频率降至所述第一脉冲信号频率的n分之一,获得所述第二脉冲信号。
6、可选的,所述当获取到上位机输出的开始采集指令时,开始对所述第一脉冲信号做分频处理,以获得第二脉冲信号,包括:根据第一脉冲信号的周期和减速器的速比计算所述晶圆的旋转周期;所述速比为所述晶圆的转速与电机的转速之比;根据图像传感器的刷新频率和所述电机的转动周期计算所述电机的转动周期内图像传感器的刷新次数m,m为正整数;设置所述电机的转动周期内采样组数k,k为大于m且小于2m的正整数。
7、可选的,所述获取晶圆触发的第一脉冲信号前,还包括:s0,当板卡上电后,将第一电压电信号转换为第二电压信号,所述第二电压电信号用于向所述图像传感器提供电能。
8、第二方面,本发明提供一种应用于晶圆预对准的数据采集装置,包括:脉冲采集模块,用于获取晶圆触发的第一脉冲信号;通讯模块,用于获取到上位机输出的开始采集指令;脉冲分频模块,用于对所述第一脉冲信号做分频处理,以获得第二脉冲信号;模拟量采集模块,用于以所述第二脉冲信号作为触发信号,采集图像传感器输出的模拟量数值;所述模拟量数值对应图像传感器被晶圆遮挡的感光区域尺寸。
9、可选的,还包括:模数转换模块,用于当所述晶圆旋转一周后,将所述模拟量数值转换为数字量数值,根据所述数字量数值计算晶圆的偏心距离。
10、可选的,所述脉冲分频模块,用于获取晶圆的转动周期,根据所述转动周期计算分频数值n,n为正整数;将所述第一脉冲信号的频率降至所述第一脉冲信号频率的n分之一,获得所述第二脉冲信号。
11、可选的,所述脉冲分频模块,还用于根据第一脉冲信号的周期和减速器的速比计算所述晶圆的旋转周期;所述速比为所述晶圆的转速与电机的转速之比;所述脉冲采集模块,还用于根据图像传感器的刷新频率和所述电机的转动周期计算所述电机的转动周期内图像传感器的刷新次数m,m为正整数;设置所述电机的转动周期内采样组数k,k为大于m且小于2m的正整数。
12、可选的,还包括电压转换模块,用于当板卡上电后,将第一电压电信号转换为第二电压信号,所述第二电压电信号用于向所述图像传感器提供电能。
13、第三方面,本发明提供一种电子设备,包括存储器和处理器,所述存储器上存储有可在所述处理器上运行的程序,当所述程序被所述处理器执行时,使得所述电子设备实现第一方面中任一项所述的方法。
14、第四方面,本发明提供一种可读存储介质,所述可读存储介质内存储有程序,所述程序被执行时,实现第一方面中任一项所述的方法。
技术特征:
1.一种应用于晶圆预对准的数据采集方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,还包括:s4,当所述晶圆旋转一周后,将所述模拟量数值转换为数字量数值,根据所述数字量数值计算晶圆的偏心距离。
3.根据权利要求1所述的方法,其特征在于,所述当获取到上位机输出的开始采集指令时,开始对所述第一脉冲信号做分频处理,以获得第二脉冲信号,包括:
4.根据权利要求1或3所述的方法,其特征在于,所述当获取到上位机输出的开始采集指令时,开始对所述第一脉冲信号做分频处理,以获得第二脉冲信号,包括:
5.根据权利要求1所述的方法,其特征在于,所述获取晶圆触发的第一脉冲信号前,还包括:
6.一种应用于晶圆预对准的数据采集装置,其特征在于,包括:
7.根据权利要求6所述的装置,其特征在于,还包括:模数转换模块,用于当所述晶圆旋转一周后,将所述模拟量数值转换为数字量数值,根据所述数字量数值计算晶圆的偏心距离。
8.根据权利要求6所述的装置,其特征在于,所述脉冲分频模块,用于获取晶圆的转动周期,根据所述转动周期计算分频数值n,n为正整数;将所述第一脉冲信号的频率降至所述第一脉冲信号频率的n分之一,获得所述第二脉冲信号。
9.根据权利要求6或8所述的装置,其特征在于,所述脉冲分频模块,还用于根据第一脉冲信号的周期和减速器的速比计算所述晶圆的旋转周期;所述速比为所述晶圆的转速与电机的转速之比;所述脉冲采集模块,还用于根据图像传感器的刷新频率和所述电机的转动周期计算所述电机的转动周期内图像传感器的刷新次数m,m为正整数;设置所述电机的转动周期内采样组数k,k为大于m且小于2m的正整数。
10.根据权利要求6所述的装置,其特征在于,还包括电压转换模块,用于当板卡上电后,将第一电压电信号转换为第二电压信号,所述第二电压电信号用于向所述图像传感器提供电能。
11.一种电子设备,其特征在于,包括存储器和处理器,所述存储器上存储有可在所述处理器上运行的程序,当所述程序被所述处理器执行时,使得所述电子设备实现权利要求1至5中任一项所述的方法。
12.一种可读存储介质,所述可读存储介质内存储有程序,其特征在于,所述程序被执行时,实现权利要求1至5中任一项所述的方法。
技术总结
本发明提供一种应用于晶圆预对准的数据采集方法、装置、设备和介质,该方法包括:S1,获取晶圆触发的第一脉冲信号;S2,当获取到上位机输出的开始采集指令时,开始对所述第一脉冲信号做分频处理,以获得第二脉冲信号;S3,以所述第二脉冲信号作为触发信号,采集图像传感器输出的模拟量数值;所述模拟量数值对应图像传感器被晶圆遮挡的感光区域尺寸。该方法用于提升晶圆对准的准确性。
技术研发人员:朱玉东,何海龙,王静,洪烨
受保护的技术使用者:中科芯微智能装备(沈阳)有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!