一种云台摄像机测试架的制作方法
本技术涉及云台摄像机,尤其是涉及一种云台摄像机测试架。
背景技术:
1、全景视频拼接是一种通过实时视频采集、拼接、融合及显示以实现实时全景空间漫游体验的技术,其将多路视频拼接成一幅大尺度图像或360度全景图。在实际拍摄过程中,由于云台摄像机的安装设计及镜头之间的差异、图像清晰度存在差异等原因,会造成视频图像之间有缩放、倾斜、方位角差异等问题,从而导致图像出现拼缝过大或过小、图像上下错位,使得拼接后的图像无法形成一张完整的图片,影响观感,因此在云台摄像机生产时需要确认全景视频拼接效果是否满足预设的出厂标准。
2、由于云台摄像机通常较重,为了避免云台摄像机在测试过程中跌落,现有的测试治具往往只能部署在桌面上,无法进行移动,测试环境受限,而全景视频拼接的应用场景普遍在20米以上的高度观测30米以外的画面,现有的测试治具通常仅能实现在3米以下的高度观测10米以外的画面,无法贴切实际应用场景。
技术实现思路
1、本实用新型提供一种云台摄像机测试架,通过将云台摄像机的测试治具设于支撑架的顶部,且支撑架的底部设有若干滑轮,能够将云台摄像机移动至任意场景进行测试,使得测试场景能够贴切实际应用场景;通过测试治具包括夹持固定组件,且支撑架上设有配重块,能够避免测试过程中因云台摄像机放置不稳或支撑架翻侧而导致云台摄像机跌落。
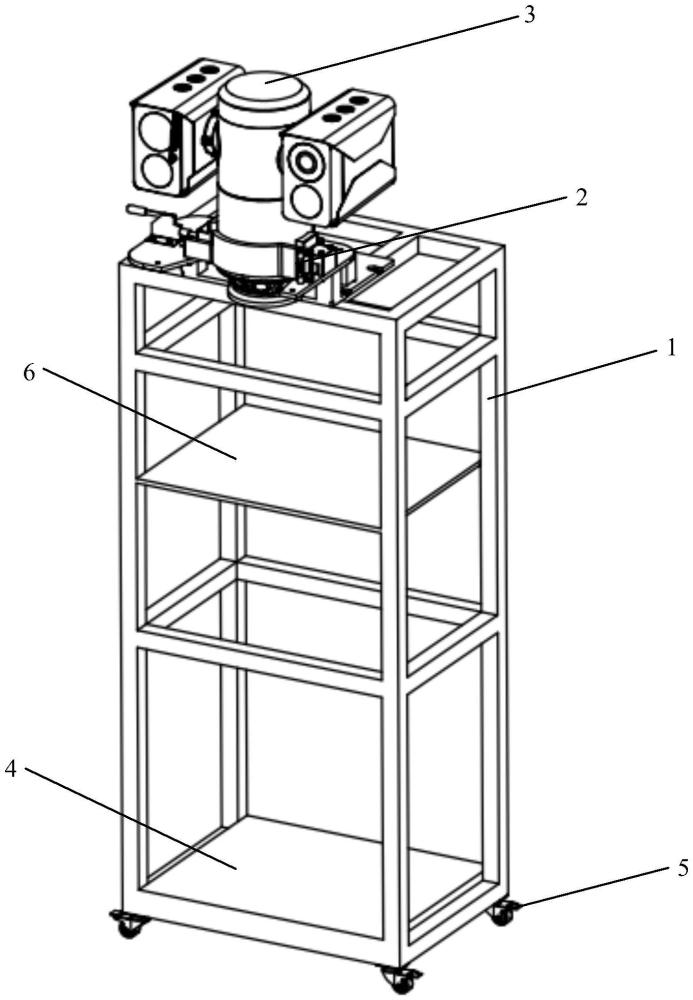
2、为了解决上述技术问题,本实用新型实施例提供一种云台摄像机测试架,包括支撑架和设于所述支撑架的顶部的测试治具;
3、所述测试治具包括夹持固定组件;所述夹持固定组件具有用于夹持云台摄像机的夹持空间;所述支撑架上设有配重块,所述支撑架的底部设有若干滑轮。
4、作为优选方案,所述夹持固定组件包括手柄、推拉杆机构、第一夹持件和第二夹持件;
5、所述第一夹持件和所述第二夹持件相对设置,所述第一夹持件和所述第二夹持件之间形成所述夹持空间;
6、所述推拉杆机构的一端与所述手柄连接,所述推拉杆机构的另一端与所述第一夹持件连接;所述推拉杆机构受控于所述手柄而将所述第一夹持件推出或拉回。
7、作为优选方案,所述第一夹持件的夹持面的形状与所述第二夹持件的夹持面的形状均匹配于所述云台摄像机。
8、作为优选方案,所述夹持固定组件还包括支撑件;
9、所述支撑件包括第一支撑部、第二支撑部和第三支撑部;所述第一支撑部设于所述支撑架的顶部,所述第二支撑部设于所述第一支撑部的一端并与所述第一支撑部形成锐角/直角/钝角,所述第三支撑部设于所述第一支撑部的另一端并与所述第一支撑部形成锐角/直角/钝角;
10、所述第二支撑部的端部和所述第三支撑部的端部分别设有第一支撑座和第二支撑座;所述手柄、所述推拉杆机构和所述第一夹持件设于所述第一支撑座上,所述第二夹持件设于所述第二支撑座上。
11、作为优选方案,所述测试治具还包括供所述云台摄像机放置的底盘;所述底盘可转动地设于所述第一支撑部上。
12、作为优选方案,所述测试治具还包括护栏件;
13、所述护栏件的一端通过销钉可转动地设于所述第一支撑座上,所述护栏件的另一端通过锁扣件设于所述第二支撑座上。
14、作为优选方案,所述测试治具还包括安全绳;所述安全绳的一端连接于所述支撑架上,所述安全绳的另一端用于与所述云台摄像机连接。
15、作为优选方案,所述支撑架为一矩形中空框体。
16、作为优选方案,所述支撑架内设有电脑放置板。
17、作为优选方案,所述支撑架的底部设有四个滑轮,任意两个所述滑轮为导向轮。
18、相比于现有技术,本实用新型实施例的有益效果在于,通过将云台摄像机的测试治具设于支撑架的顶部,且支撑架的底部设有若干滑轮,能够将云台摄像机移动至任意场景进行测试,使得测试场景能够贴切实际应用场景;通过测试治具包括夹持固定组件,且支撑架上设有配重块,能够避免测试过程中因云台摄像机放置不稳或支撑架翻侧而导致云台摄像机跌落。
技术特征:
1.一种云台摄像机测试架,其特征在于,包括支撑架和设于所述支撑架的顶部的测试治具;
2.如权利要求1所述的云台摄像机测试架,其特征在于,所述第一夹持件的夹持面的形状与所述第二夹持件的夹持面的形状均匹配于所述云台摄像机。
3.如权利要求1所述的云台摄像机测试架,其特征在于,所述夹持固定组件还包括支撑件;
4.如权利要求3所述的云台摄像机测试架,其特征在于,所述测试治具还包括供所述云台摄像机放置的底盘;所述底盘可转动地设于所述第一支撑部上。
5.如权利要求3所述的云台摄像机测试架,其特征在于,所述测试治具还包括护栏件;
6.如权利要求1所述的云台摄像机测试架,其特征在于,所述测试治具还包括安全绳;所述安全绳的一端连接于所述支撑架上,所述安全绳的另一端用于与所述云台摄像机连接。
7.如权利要求1所述的云台摄像机测试架,其特征在于,所述支撑架为一矩形中空框体。
8.如权利要求7所述的云台摄像机测试架,其特征在于,所述支撑架内设有电脑放置板。
9.如权利要求1所述的云台摄像机测试架,其特征在于,所述支撑架的底部设有四个滑轮,任意两个所述滑轮为导向轮。
技术总结
本技术提供一种云台摄像机测试架,包括支撑架和设于所述支撑架的顶部的测试治具;所述测试治具包括夹持固定组件;所述夹持固定组件具有用于夹持云台摄像机的夹持空间;所述支撑架上设有配重块,所述支撑架的底部设有若干滑轮。本技术通过将云台摄像机的测试治具设于支撑架的顶部,且支撑架的底部设有若干滑轮,能够将云台摄像机移动至任意场景进行测试,使得测试场景能够贴切实际应用场景;通过测试治具包括夹持固定组件,且支撑架上设有配重块,能够避免测试过程中因云台摄像机放置不稳或支撑架翻侧而导致云台摄像机跌落。
技术研发人员:程东杰,刘志勇,陈晓杰
受保护的技术使用者:高新兴国迈科技有限公司
技术研发日:20230524
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!