多摄像头光学叠加融合器的制作方法
本技术涉及水下机器人,具体为多摄像头光学叠加融合器。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。水下机器人在水中移动时,需要用到许多个摄像头,要通过融合器进行融合,防止画面产生缝隙感。
2、但是现有的融合器在深水区域,不能进行使用,容易受到水底巨大压强的损坏,不利用长时间使用,不便于使用,同时当水下机器人碰到鱼群时,不能进行声音驱散,容易受到鱼群撞击损坏,不利于在水下机器人在水底观察。
3、于是,有鉴于此,针对现有的结构不足予以研究改良,提出多摄像头光学叠加融合器。
技术实现思路
1、本实用新型的目的在于提供多摄像头光学叠加融合器,以解决上述背景技术中提出的问题。
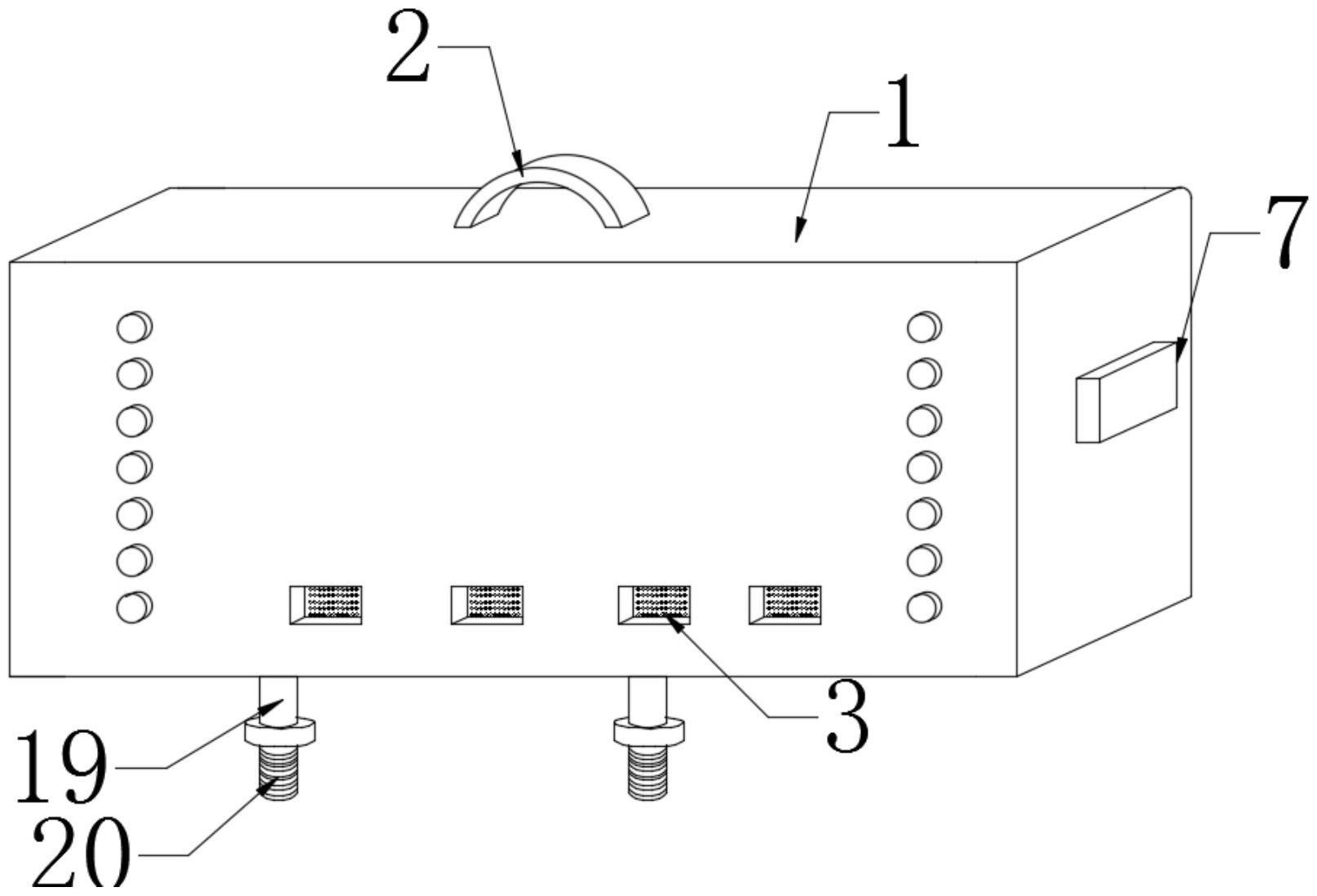
2、为实现上述目的,本实用新型提供如下技术方案:多摄像头光学叠加融合器,包括保护壳和融合器本体,所述保护壳的上方设置有手柄,所述保护壳的前方外表面开设有若干个连接口,所述融合器本体设置于保护壳内部,所述融合器本体的外表面设置有若有个扭簧,所述扭簧的两端分别连接有第一弹簧,所述第一弹簧的另一端与保护壳内壁固定连接,所述保护壳的左右两侧均设置有保护棉。
3、优选的,所述融合器本体的底部内部设置有箱体,且箱体的中间上方设置有微型电机,所述微型电机的输出端固定连接有第一齿轮,且箱体的内部设置有第二齿轮,所述第一齿轮穿过箱体内部与第二齿轮啮合连接。
4、优选的,所述第二齿轮的中间贯穿有第一转杆,且第一转杆设置于箱体内部,所述第一转杆两端分别设置有凸轮,且凸轮的上方设有撞杆。
5、优选的,所述撞杆的左右两侧设置有限位槽,且限位槽开设于箱体内壁,所述撞杆上方固定连接有铁球,且铁球的上方设有铁片。
6、优选的,所述铁片沿箱体中轴线对称设置有两个,且铁片的底部与箱体上表面固定连接。
7、优选的,所述保护壳的下方固定连接有固定块,且固定块的下方设置有螺纹杆,且螺纹杆的中部设置有转环。
8、优选的,所述转环与螺纹杆固定连接,且螺纹杆的上方与固定块固定连接,并且螺纹杆沿保护壳下表面中心对称设置有四个。
9、与现有技术相比,本实用新型的有益效果是:
10、1.本实用新型通过保护壳、融合器本体、扭簧、第一弹簧和保护棉的设置,在机器人进入到深水中,水压首先会挤压保护壳,从而传递第一弹簧和扭簧组成的缓冲结构上,使得压力会大部分被卸掉,从而使得融合器本体受到的压力较小,不会受到压力的损坏,同时保护壳左右两端的保护棉防止保护壳安装时发生晃动时,砸坏保护壳,从而间接保护融合器本体,体现了装置的实用性;
11、2.本实用新型通过箱体、微型电机、第一齿轮、第二齿轮、第一转杆、凸轮、限位槽、撞杆、铁球和铁片的设置,当机器人在水中进行使用时,如果有鱼类进行通过时,通过启动箱体上的微型电机,使得微型电机带动第一齿轮进行转动,从而带动第二齿轮进行转动,使得第一转杆转动,从而使得第一转杆上的凸轮进行转动,凸轮的凸面与撞杆接触时,会推动撞杆和铁球进行上升,来使铁球与铁片进行接触,从而与铁片接触发出声音,从而驱赶鱼群,防止鱼群撞击机器人造成损坏,保障机器人在深水的使用,限位槽对撞杆进行限位,防止撞杆下降的距离过大;
12、3.本实用新型通过固定块、螺纹杆和转环的设置,当需要进行融合器本体进行安装时,通过螺纹杆与机器人内部的螺纹槽进行放入以后,在通过旋转转环,使得螺纹杆在固定块的作用下,进行转动,来进入到机器人内部的螺纹槽中,从而进行固定,防止机器人在水底不规则的地面移动时,融合器本体发生晃动的现象,体现了装置的实用性。
技术特征:
1.多摄像头光学叠加融合器,包括保护壳(1)和融合器本体(4),其特征在于,所述保护壳(1)的上方设置有手柄(2),所述保护壳(1)的前方外表面开设有若干个连接口(3),所述融合器本体(4)设置于保护壳(1)内部,所述融合器本体(4)的外表面设置有若有个扭簧(5),所述扭簧(5)的两端分别连接有第一弹簧(6),所述第一弹簧(6)的另一端与保护壳(1)内壁固定连接,所述保护壳(1)的左右两侧均设置有保护棉(7)。
2.根据权利要求1所述的多摄像头光学叠加融合器,其特征在于,所述融合器本体(4)的底部内部设置有箱体(8),且箱体(8)的中间上方设置有微型电机(9),所述微型电机(9)的输出端固定连接有第一齿轮(10),且箱体(8)的内部设置有第二齿轮(11),所述第一齿轮(10)穿过箱体(8)内部与第二齿轮(11)啮合连接。
3.根据权利要求2所述的多摄像头光学叠加融合器,其特征在于,所述第二齿轮(11)的中间贯穿有第一转杆(12),且第一转杆(12)设置于箱体(8)内部,所述第一转杆(12)两端分别设置有凸轮(13),且凸轮(13)的上方设有撞杆(15)。
4.根据权利要求3所述的多摄像头光学叠加融合器,其特征在于,所述撞杆(15)的左右两侧设置有限位槽(14),且限位槽(14)开设于箱体(8)内壁,所述撞杆(15)上方固定连接有铁球(16),且铁球(16)的上方设有铁片(17)。
5.根据权利要求4所述的多摄像头光学叠加融合器,其特征在于,所述铁片(17)沿箱体(8)中轴线对称设置有两个,且铁片(17)的底部与箱体(8)上表面固定连接。
6.根据权利要求1所述的多摄像头光学叠加融合器,其特征在于,所述保护壳(1)的下方固定连接有固定块(18),且固定块(18)的下方设置有螺纹杆(19),且螺纹杆(19)的中部设置有转环(20)。
7.根据权利要求6所述的多摄像头光学叠加融合器,其特征在于,所述转环(20)与螺纹杆(19)固定连接,且螺纹杆(19)的上方与固定块(18)固定连接,并且螺纹杆(19)沿保护壳(1)下表面中心对称设置有四个。
技术总结
本技术公开了多摄像头光学叠加融合器,涉及水下机器人技术领域,包括保护壳和融合器本体,所述保护壳的上方设置有手柄,所述保护壳的前方外表面开设有若干个连接口,所述融合器本体设置于保护壳内部,所述融合器本体的外表面设置有若有个扭簧,所述扭簧的两端分别连接有第一弹簧。该多摄像头光学叠加融合器,与现有的普通融合器相比,在机器人进入到深水中,水压首先会挤压保护壳,从而传递第一弹簧和扭簧组成的缓冲结构上,使得压力会大部分被卸掉,从而使得融合器本体受到的压力较小,不会受到压力的损坏,同时保护壳左右两端的保护棉防止保护壳安装时发生晃动时,砸坏保护壳,从而间接保护融合器本体,体现了装置的实用性。
技术研发人员:孙剑灵
受保护的技术使用者:厦门希烨科技有限公司
技术研发日:20230627
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!