一种消防值班机器人的制作方法
本技术涉及消防设备,具体为一种消防值班机器人。
背景技术:
1、公开号为cn213054843u的一种智能消防控制室的值班机器人,通过旋转底座、第一摄像头和第二摄像头的设置,通过旋转底座进行转动,可带动第一摄像头转动拍摄,将消防控制室内的环境下进行环绕盘拍摄,并通过活动左臂,通过第二摄像头对第一摄像头拍摄死角进行补足,有利于通过智能消防控制室的值班机器人观察消防控制室内部情况,通过烟雾传感器和温度传感器的设置,通过旋转右臂使得右臂上抬,由于火灾出现的同时产生烟雾较轻上浮,烟雾传感器可感应烟雾,同时温度传感器感应热源,对消防控制室内是否存在火情进行观察,便于检测消防控制室内是否存在。
2、上述一种智能消防控制室的值班机器人,在使用时,虽然能够通过摄像头对室内进行实时的监控,并且在监控时通过旋转摄像头的角度增加摄像头的监控范围,但是在使用时,难以将摄像头的高度进行调节,不便于应用多元化环境的使用,实用性较低。
技术实现思路
1、本实用新型的目的在于提供一种消防值班机器人,能够解决难以将摄像头的高度进行调节,不便于应用多元化环境的使用的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种消防值班机器人,包括机器人主体、辅助组件和升降组件;
3、辅助组件设于所述机器人主体上,所述辅助组件包括正反电机和固定板,正反电机用于驱使固定板进行旋转;
4、升降组件设于所述机器人主体上,所述升降组件包括驱动电机、防护箱和摄像头,驱动电机用于驱使摄像头进行升降,防护箱的内部设置有摄像头活动的空间。
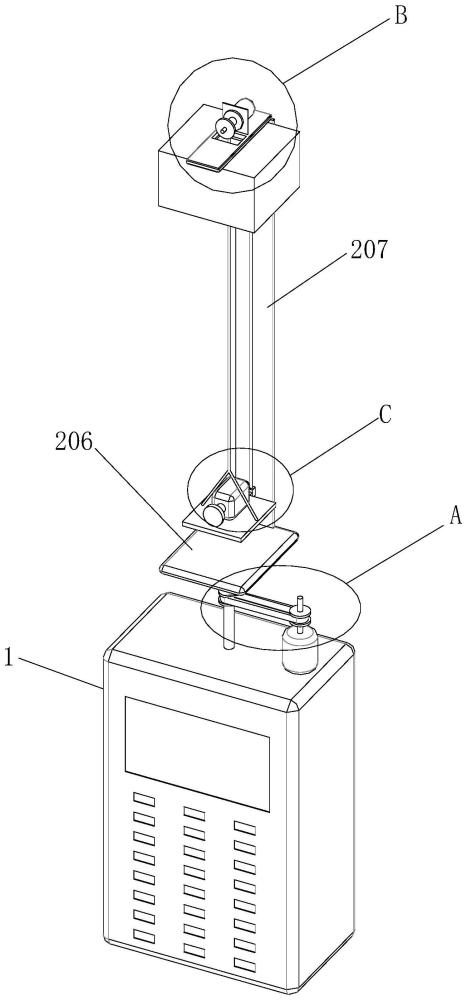
5、优选的,所述辅助组件还包括转动轴、转动柱、皮带轮、皮带、支撑板和顶板,机器人主体的顶部固定安装有正反电机,正反电机的转轴固定安装有转动轴,机器人主体的顶部转动安装有转动柱,转动轴的外壁与转动柱的外壁均固定安装有皮带轮,皮带轮的数量为两组,两组皮带轮通过皮带传动连接,转动柱的顶部固定安装有固定板,固定板的顶部固定安装有支撑板,支撑板的顶部固定安装有顶板。
6、优选的,所述升降组件还包括安装竖板、转杆、缠绕轮、牵引绳、升降板、导向杆、滑动套管和连接杆,顶板的顶部固定安装有安装竖板,安装竖板的后侧固定安装有驱动电机,驱动电机的转轴延伸至安装竖板的前侧且固定安装有转杆,转杆的外壁固定安装有缠绕轮,顶板的底部固定安装有防护箱,缠绕轮的外壁与牵引绳的一端固定安装,牵引绳的底部固定安装有升降板,升降板的顶部固定安装有摄像头,顶板的底部与固定板的顶部固定安装有导向杆,导向杆的外壁滑动安装有滑动套管,滑动套管的前侧固定安装有连接杆,连接杆的前侧与升降板的后侧固定安装。
7、优选的,所述顶板的内部开设有可供牵引绳活动的开口。
8、优选的,所述牵引绳的底部与升降板呈三角设置,这样设置能够增加升降板的平衡性。
9、优选的,所述防护箱位于升降板和摄像头的正上方,防护箱能够在摄像头运输的过程中,将摄像头收入至防护箱内,对摄像头进行保护。
10、与现有技术相比,本实用新型的有益效果是:该消防值班机器人,通过正反电机、转动轴、转动柱、皮带轮和皮带的配合使用,能够将摄像头进行旋转,这样能够在摄像头监控的过程中,增加摄像头的监控范围,进而降低消防隐患,提高装置的实用性,再通过安装竖板、驱动电机、转杆、缠绕轮、防护箱、牵引绳和升降板的配合使用,能够将摄像头进行升降处理,这样当室内的遮挡物较多时,能够将摄像头上升之后获取室内的视野,进而能够适用于不同环境下使用,增加装置的适用范围,进一步地提高了装置的实用性。
技术特征:
1.一种消防值班机器人,其特征在于:包括:
2.根据权利要求1所述的一种消防值班机器人,其特征在于:所述辅助组件(2)还包括转动轴(202)、转动柱(203)、皮带轮(204)、皮带(205)、支撑板(207)和顶板(208),机器人主体(1)的顶部固定安装有正反电机(201),正反电机(201)的转轴固定安装有转动轴(202),机器人主体(1)的顶部转动安装有转动柱(203),转动轴(202)的外壁与转动柱(203)的外壁均固定安装有皮带轮(204),皮带轮(204)的数量为两组,两组皮带轮(204)通过皮带(205)传动连接,转动柱(203)的顶部固定安装有固定板(206),固定板(206)的顶部固定安装有支撑板(207),支撑板(207)的顶部固定安装有顶板(208)。
3.根据权利要求2所述的一种消防值班机器人,其特征在于:所述升降组件(3)还包括安装竖板(301)、转杆(303)、缠绕轮(304)、牵引绳(306)、升降板(307)、导向杆(309)、滑动套管(310)和连接杆(311),顶板(208)的顶部固定安装有安装竖板(301),安装竖板(301)的后侧固定安装有驱动电机(302),驱动电机(302)的转轴延伸至安装竖板(301)的前侧且固定安装有转杆(303),转杆(303)的外壁固定安装有缠绕轮(304),顶板(208)的底部固定安装有防护箱(305),缠绕轮(304)的外壁与牵引绳(306)的一端固定安装,牵引绳(306)的底部固定安装有升降板(307),升降板(307)的顶部固定安装有摄像头(308),顶板(208)的底部与固定板(206)的顶部固定安装有导向杆(309),导向杆(309)的外壁滑动安装有滑动套管(310),滑动套管(310)的前侧固定安装有连接杆(311),连接杆(311)的前侧与升降板(307)的后侧固定安装。
4.根据权利要求3所述的一种消防值班机器人,其特征在于:所述顶板(208)的内部开设有可供牵引绳(306)活动的开口。
5.根据权利要求4所述的一种消防值班机器人,其特征在于:所述牵引绳(306)的底部与升降板(307)呈三角设置。
6.根据权利要求5所述的一种消防值班机器人,其特征在于:所述防护箱(305)位于升降板(307)和摄像头(308)的正上方。
技术总结
本技术公开了一种消防值班机器人,涉及消防设备技术领域。该消防值班机器人,包括机器人主体、辅助组件和升降组件。该消防值班机器人,通过正反电机、转动轴、转动柱、皮带轮和皮带的配合使用,能够将摄像头进行旋转,这样能够在摄像头监控的过程中,增加摄像头的监控范围,进而降低消防隐患,提高装置的实用性,再通过安装竖板、驱动电机、转杆、缠绕轮、防护箱、牵引绳和升降板的配合使用,能够将摄像头进行升降处理,这样当室内的遮挡物较多时,能够将摄像头上升之后获取室内的视野,进而能够适用于不同环境下使用,增加装置的适用范围,进一步地提高了装置的实用性。
技术研发人员:田野,杨国琼,刘华江
受保护的技术使用者:天霄科技集团有限公司
技术研发日:20230627
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!