基于AOTF的无人机机载动态光谱图像快速获取系统
本发明涉及高光谱遥感,具体涉及一种基于aotf的无人机机载动态光谱图像快速获取系统。
背景技术:
1、无人机机载高光谱成像技术可同时获取地面目标物的几何、辐射和光谱信息,集相机、辐射计和光谱仪能力于一体。可以在拥有较高的空间分辨率和光谱分辨率条件下获取光谱范围和空间体积覆盖更广的数据。基于声光可调谐滤波器(acousto-optic tunablefilter,aotf)的高光谱成像系统因其光谱分辨率高、波长调谐稳定迅速、质量轻体积小,全固体结构抗扰动能力强的特点,和同时获取目标的二维图像信息与光谱信息的能力,在遥感领域、生物医学领域、材料科学领域有着广泛的应用,为环境监测、军事侦查、深空探测等方向提供了技术支持。
2、目前无人机机载高光谱成像系统对无人机姿态测量系统精度、平台的载重量稳定性等,光谱成像系统的重量、体积及固定性等都提出了较高要求。国内适用于无人机机载平台的光谱成像系统比较少,主要是使用固定翼无人飞机载滤光片或者光栅作为分光器件的光学成像系统,这种固定翼无人机无法悬停,且起飞和降落需要特制的助飞结构,收放过程十分麻烦;单滤光片分光的系统一次只能采集一个波段的图像,而多滤光片分光的系统体积和重量又大大增加;若以光栅为分光器件,想要获得单一衍射级次的图像,其系统部件数量多且各自独立,无法固定在一起,稳定性很差。此外,由于气流的变化无常,无人机本身存在运动速度快,工作产生抖动等引起画面大幅晃动,影响图像质量,降低对目标的跟踪识别效果。所以,有必要在运动载体的监控系统中进行稳像处理。
技术实现思路
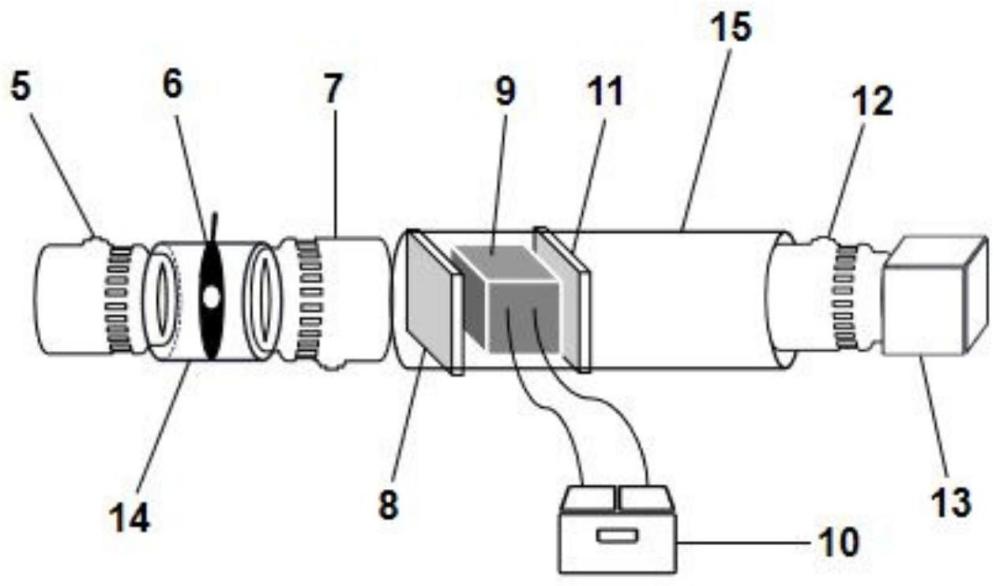
1、为克服现有技术的不足,本发明旨在提出一种基于无人机机载动态光谱图像快速获取系统,其具备整机一体化、无需负载微型计算机等特点,能够实现获取高分辨率连续宽波段的光谱图像信息。为此,本发明采取的技术方案是,基于aotf的无人机机载动态光谱图像快速获取系统,包括无人机、声光可调谐滤波器aotf高光谱成像系统、无线控制系统以及电子稳像模块;所述的无人机机身下方有载物平台;所述的aotf高光谱成像系统搭载于所述载物平台,包括根据光线传输顺序依次排列的聚焦镜,可变光阑,准直镜,偏振片ⅰ,声光可调谐滤波器,偏振片ⅱ,后置镜头和探测系统;所述的无线控制系统,包括机载无线终端,地面无线终端,aotf驱动器和电池;地面无线终端通过无线通信技术与机载无线终端通信,机载无线终端与机载aotf驱动器和探测系统相连,机载无线终端收到来自地面无线终端的aotf驱动信号,并传输至aotf驱动器,控制改变电信号输入频率,进而改变声光可调滤波器输出光波长;探测系统将光谱图像通过机载无线终端发送至地面无线终端,并传入地面无线终端中的电子稳像模块处理后进行显示和同步储存,电池用来给aotf驱动器供电。
2、无线通信技术是无线电技术、嵌入式sim卡技术、simfi技术、wifi技术或蓝牙传输技术中的一种。
3、所述的电子稳像模块是位于地面电脑中的图像处理模块,对扫频获取的连续光谱进行稳像处理,具体步骤是:获取的扫频光谱自动输入进行分帧处理,通过色彩空间将每帧图像转化为灰度图像;逐帧进行特征点、角点检测,获得特征值,将相邻帧中的特征值进行匹配;使用金字塔迭代lucas–kanade光流算法探测帧之间的运动;分析特征点的运动,得到帧之间特征点x,y方向上的平移运动和角度的旋转变化量;使用移动平滑滤波器对数据体中的运动量进行轨迹平滑处理;将平滑后的运动轨迹与原运动轨迹对比,得出运动补偿矩阵;将每一帧的运动补偿矩阵叠加到原信息上,得到稳像处理后的连续动态光谱图像。
4、所述的无人机为多旋翼无人机,能够执行几十米至几千米的飞行高度,实现垂直起降、定点悬停、巡航等功能,机身的下方的载物平台具有千克级承重量,能实现无遮挡全方位拍摄。
5、所述的aotf高光谱成像系统中的声光可调谐滤波器核心双折射晶体是teo2,针对e光入射设计,偏振片ⅰ的输出偏振方向平行于teo2晶体主平面,偏振片ⅱ的输出偏振方向垂直于teo2晶体主平面,声光可调谐滤波器的窗口大小为10mm*10mm,即最大光束直径为10mm,aotf驱动器的频率分辨率最高为1khz,则一个波长的扫描时间为0.15ms。
6、近似无限远处光线照射在被测物体上,经过目标物反射或透射后以平行光入射聚焦镜,汇聚后被准直镜接收,可变光阑位于两者共焦面处,起到约束轴外光线、调节光强大小的作用,设置偏振片ⅰ的输出偏振方向平行于声光可调谐滤波器核心双折射晶体主平面,作用是将入射自然光变为非寻常线偏正光,平行入射针对e光入射设计的声光可调谐滤波器,由无线通信技术远程控制aotf驱动器,更改外加电信号的频率和功率,产生对应频率的超声波,使得光线在声光可调谐滤波器核心双折射晶体内发生反常布拉格衍射,经过声光可调谐滤波器产生的衍射光偏振态发生了变化,变为寻常偏振光,但仍为平行光,通过设置偏振片ⅱ的输出偏振方向垂直于声光可调谐滤波器核心双折射晶体主平面,用于滤除系统不需要的衍射e光、并且削弱直接透射晶体的0级光,最后平行汇入后置镜头,被后面的探测系统接收采集,将采集到的图像通过机载无线实时传入地面无线终端。
7、所述的aotf高光谱成像系统中的聚焦镜与准直镜通过对应尺寸设计的螺纹套筒拧成一个整体,其中内置可变光阑,用以控制通光量和视场大小,使用金属连接件将前置光学部分、分光部分、后置成像部分紧密固定成一个整体。
8、本发明的特点及有益效果是:
9、1)本发明提供的一种基于aotf的无人机机载动态光谱图像快速获取系统,实现整机一体化。aotf成像系统中聚焦镜与准直镜通过内置可变光阑的螺纹套筒连接,使用金属连接件将分散的前置光学、偏振分光、后置成像三部分固定成一个整体,稳定性好,信噪比高;
10、2)本发明提供的一种基于aotf的无人机机载动态光谱图像快速获取系统,通过无线电技术、嵌入式sim卡技术、simfi技术、wifi技术或蓝牙传输技术等无线通信技术实现地面终端远程控制aotf驱动器改变电信号输入频率,无需负载微型计算机,体积小巧,功耗低,无人机负载轻,速度快,精确度高;
11、3)本发明提供的一种基于aotf的无人机机载动态光谱图像快速获取系统,内置电子稳像模块,能够快速实时处理传输扫频获取的连续光谱,得到稳定无抖动的动态光谱信息。
技术特征:
1.一种基于aotf的无人机机载动态光谱图像快速获取系统,其特征是,包括无人机、声光可调谐滤波器aotf高光谱成像系统、无线控制系统以及电子稳像模块;所述的无人机机身下方有载物平台;所述的aotf高光谱成像系统搭载于所述载物平台,包括根据光线传输顺序依次排列的聚焦镜,可变光阑,准直镜,偏振片ⅰ,声光可调谐滤波器,偏振片ⅱ,后置镜头和探测系统;所述的无线控制系统,包括机载无线终端,地面无线终端,aotf驱动器和电池,地面无线终端通过无线通信技术与机载无线终端通信,机载无线终端与aotf驱动器和探测系统相连。机载无线终端收到来自地面无线终端的aotf驱动信号,并传输至aotf驱动器,控制改变电信号输入频率,进而改变声光可调滤波器输出光波长;探测系统将光谱图像通过机载无线终端发送至地面无线终端,并传入地面无线终端中的电子稳像模块处理后进行显示和同步储存,电池用来给aotf驱动器供电。
2.如权利要求1所述的基于aotf的无人机机载动态光谱图像快速获取系统,其特征是,无线通信技术是无线电技术、嵌入式sim卡技术、simfi技术、wifi技术或蓝牙传输技术中的一种。
3.如权利要求1所述的基于aotf的无人机机载动态光谱图像快速获取系统,其特征是,所述的电子稳像模块是位于地面电脑中的图像处理模块,对扫频获取的连续光谱进行稳像处理,具体步骤是:获取的扫频光谱自动输入进行分帧处理,通过色彩空间将每帧图像转化为灰度图像;逐帧进行特征点、角点检测,获得特征值,将相邻帧中的特征值进行匹配;使用金字塔迭代lucas–kanade光流算法探测帧之间的运动;分析特征点的运动,得到帧之间特征点x,y方向上的平移运动和角度的旋转变化量;使用移动平滑滤波器对数据体中的运动量进行轨迹平滑处理;将平滑后的运动轨迹与原运动轨迹对比,得出运动补偿矩阵;将每一帧的运动补偿矩阵叠加到原信息上,得到稳像处理后的连续动态光谱图像。
4.如权利要求1所述的基于aotf的无人机机载动态光谱图像快速获取系统,其特征是,所述的无人机为多旋翼无人机,能够执行几十米至几千米的飞行高度,实现垂直起降、定点悬停、巡航等功能,机身的下方的载物平台具有千克级承重量,能实现无遮挡全方位拍摄。
5.如权利要求1所述的基于aotf的无人机机载动态光谱图像快速获取系统,其特征是,所述的aotf高光谱成像系统中的声光可调谐滤波器核心双折射晶体是teo2,针对e光入射设计,偏振片ⅰ的输出偏振方向平行于teo2晶体主平面,偏振片ⅱ的输出偏振方向垂直于teo2晶体主平面,声光可调谐滤波器的窗口大小为10mm*10mm,即最大光束直径为10mm,aotf驱动器的频率分辨率最高为1khz,则一个波长的扫描时间为0.15ms。
6.如权利要求1或5所述的基于aotf的无人机机载动态光谱图像快速获取系统,其特征是,近似无限远处光线照射在被测物体上,经过目标物反射或透射后以平行光入射聚焦镜,汇聚后被准直镜接收,可变光阑位于两者共焦面处,起到约束轴外光线、调节光强大小的作用,设置偏振片ⅰ的输出偏振方向平行于声光可调谐滤波器核心双折射晶体主平面,作用是将入射自然光变为非寻常线偏正光,平行入射针对e光入射设计的声光可调谐滤波器,由无线通信技术远程控制aotf驱动器,更改外加电信号的频率和功率,产生对应频率的超声波,使得光线在声光可调谐滤波器核心双折射晶体内发生反常布拉格衍射,经过声光可调谐滤波器产生的衍射光偏振态发生了变化,变为寻常偏振光,但仍为平行光,通过设置偏振片ⅱ的输出偏振方向垂直于声光可调谐滤波器核心双折射晶体主平面,用于滤除系统不需要的衍射e光、并且削弱直接透射晶体的0级光,最后平行汇入后置镜头,被后面的探测系统接收采集,将采集到的图像通过机载无线实时传入地面无线终端。
7.如权利要求1所述的基于aotf的无人机机载动态光谱图像快速获取系统,其特征是,所述的aotf高光谱成像系统中的聚焦镜与准直镜通过对应尺寸设计的螺纹套筒拧成一个整体,其中内置可变光阑,用以控制通光量和视场大小,使用金属连接件将前置光学部分、分光部分、后置成像部分紧密固定成一个整体。
技术总结
本发明涉及高光谱遥感技术领域,为提出一种基于无人机机载动态光谱图像快速获取系统,实现获取高分辨率连续宽波段的光谱图像信息。为此,本发明,基于AOTF的无人机机载动态光谱图像快速获取系统,包括无人机、声光可调谐滤波器AOTF高光谱成像系统、无线控制系统以及电子稳像模块;所述的无人机机身下方有载物平台;所述的AOTF高光谱成像系统搭载于所述载物平台;所述的无线控制系统,包括机载无线终端,地面无线终端,AOTF驱动器和电池,地面无线终端通过无线通信技术与机载无线终端通信,机载无线终端与AOTF驱动器和探测系统相连。本发明主要应用于无人机机载动态光谱图像快速获取设备的设计制造场合。
技术研发人员:张尹馨,李诗琪,周宸研
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!