一种双目相机的防抖方法与流程
本发明涉及双目相机,具体为一种双目相机的防抖方法。
背景技术:
1、目前手机防抖功能分2种,一种是电子防抖eis,纯软件范畴,基于前后2帧或多帧图片进行合成,硬件上无需额外投入,主要依靠相机或者手机的isp进行图像处理,成本小,效果略差,不如硬件防抖;另外一种是硬件防抖ois,有云台,滚珠,悬丝,sma等,特点是使用gyro陀螺仪检测抖动信号,把信号传给ois马达driver,由ois driver驱动ois马达(带着镜头)做反向运动,抵消影像模组的抖动,实现防抖功能,效果好,但是硬件投入大,设计难度高,添加ois组件还导致模组体积增大,对手机有限的空间是一种挑战
2、由于eis防抖效果不佳,需要在2帧或多帧图像之间找出相同的内容进行影像处理,因抖动导致边缘部分的内容有差异,不相同,无法处理,只能舍弃,所以采用eis功能得到的图片都会缩小分辨率;因为以前的手机处理器功能不够强大,对高像素高帧率的影像进行实时处理是困难的(比如1亿像素的手机全像素拍摄保存一张图片需要1—3秒),如果要做防抖运算处理,至少需要2-3帧图片,耗时10秒,跟不上节奏,没有现实意义,导致eis功能不适用于高像素全分辨率模式,犹如鸡肋;
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种双目相机的防抖方法,具备快速防抖且节省手机内部空间等优点,解决了上述技术问题。
3、(二)技术方案
4、为实现上述目的,本发明提供如下技术方案:一种双目相机的防抖方法,包括以下步骤:
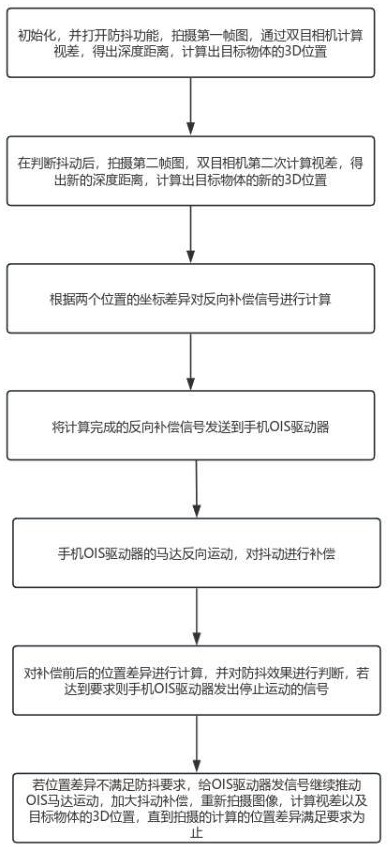
5、s1、初始化,并打开防抖功能,拍摄第一帧图,通过双目相机计算视差,得出深度距离,计算出目标物体的3d位置;
6、s2、在判断抖动后,拍摄第二帧图,双目相机第二次计算视差,得出新的深度距离,计算出目标物体的新的3d位置;
7、s3、根据两个位置的坐标差异对反向补偿信号进行计算;
8、s4、将计算完成的反向补偿信号发送到手机ois驱动器;
9、s5、手机ois驱动器的马达反向运动,对抖动进行补偿;
10、s6、在补偿完成后,拍摄第三帧图,双目相机第三次计算视差,得出补偿后的目标物体的3d位置;
11、s7、对补偿前后的位置差异进行计算,并对防抖效果进行判断,若达到要求则手机ois驱动器发出停止运动的信号,若不满足则执行步骤s8;
12、s8、若位置差异不满足防抖要求,给ois驱动器发信号继续推动ois马达运动,加大抖动补偿,重新拍摄图像,计算视差以及目标物体的3d位置,直到拍摄的计算的位置差异满足要求为止。
13、作为本发明的优选技术方案,所述步骤s1中计算视差以及深度距离的计算公式如下:
14、视差
15、d=x1-x2
16、深度距离
17、
18、其中,d表示视差,z表示深度距离,f表示双目相机的焦距,t表示双目相机的主摄和副摄的中心距,x1和x2分别表示双目相机的主摄和副摄的中心距t所在的中心连线上对应同一p点分别在主摄和副摄图像上的投影点偏离中心点的值。
19、作为本发明的优选技术方案,所述步骤s1在第一帧图拍摄前需要在不同距离不同角度进行标定,获取不同距离不同角度下的视差信息,把视差数据写入双目相机的eeprom中备用。
20、作为本发明的优选技术方案,所述步骤s1中打开防抖功能时双目相机的主摄和副摄分别从各个画面中心区域向边缘扩展寻找相同特征点,并对主摄和副摄的特征点进行匹配,用于保证主摄和副摄选取的特征点为同一位置,若主摄和副摄的特征点不同则重新进行选择特征点。
21、作为本发明的优选技术方案,所述主摄和副摄选取特征点的原则优先级为运动变化速度最慢、亮度最高、亮度最低以及对比度最高的特征。
22、作为本发明的优选技术方案,所述主摄和副摄的ois功能不同时打开。
23、作为本发明的优选技术方案,所述主摄开启ois功能时,若副摄未配置ois功能,则需要af/ff配置。
24、作为本发明的优选技术方案,所述主摄开启ois功能时,若副摄配置有ois功能,则关闭副摄配置ois功能,所述副摄开启ois功能时,主摄主动关闭ois功能,并协助副摄进行运算。
25、与现有技术相比,本发明提供了一种双目相机的防抖方法,具备以下有益效果:
26、1、本发明通过使用双目相机检测目标物体的深度距离:通过调用双目相机标定的存储数据,把双目相机的视差信息转化为目标物体的位置信息,通过前后2帧或多帧图片的比对判断镜头的抖动幅度,手机isp/ai把检测结果转化为抖动信号,并计算出对应的补偿信号发给ois驱动器,由ois驱动器驱动ois马达运动,带动镜头运动,对抖动做出补偿,从而获得更为清晰的影像。
27、2、本发明通过取消了模组内的霍尔元件和gyro陀螺仪,能够控制模组体积的增大,没有霍尔元件和gyro陀螺仪,也就不需要对应的fpc布线,降低了设计难度。
技术特征:
1.一种双目相机的防抖方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种双目相机的防抖方法,其特征在于:所述步骤s1中计算视差以及深度距离的计算公式如下:视差深度距离其中,表示视差,表示深度距离,表示双目相机的焦距,表示双目相机的主摄和副摄的中心距,和分别表示双目相机的主摄和副摄的中心距所在的中心连线上对应同一点分别在主摄和副摄图像上的投影点偏离中心点的值。
3.根据权利要求2所述的一种双目相机的防抖方法,其特征在于:所述步骤s1在第一帧图拍摄前需要在不同距离不同角度进行标定,获取不同距离不同角度下的视差信息,把视差数据写入双目相机的eeprom中备用。
4.根据权利要求3所述的一种双目相机的防抖方法,其特征在于:所述步骤s1中打开防抖功能时双目相机的主摄和副摄分别从各个画面中心区域向边缘扩展寻找相同特征点,并对主摄和副摄的特征点进行匹配,用于保证主摄和副摄选取的特征点为同一位置,若主摄和副摄的特征点不同则重新进行选择特征点。
5.根据权利要求4所述的一种双目相机的防抖方法,其特征在于:所述主摄和副摄选取特征点的原则优先级为运动变化速度最慢、亮度最高、亮度最低以及对比度最高的特征。
6.根据权利要求4所述的一种双目相机的防抖方法,其特征在于:所述主摄和副摄的ois功能不同时打开。
7.根据权利要求6所述的一种双目相机的防抖方法,其特征在于:所述主摄开启ois功能时,若副摄未配置ois功能,则需要af/ff配置。
8.根据权利要求6所述的一种双目相机的防抖方法,其特征在于:所述主摄开启ois功能时,若副摄配置有ois功能,则关闭副摄配置ois功能,所述副摄开启ois功能时,主摄主动关闭ois功能,并协助副摄进行运算。
技术总结
本发明涉及双目相机技术领域,且公开了一种双目相机的防抖方法初始化,并打开防抖功能,拍摄第一帧图,通过双目相机计算视差,得出深度距离,计算出目标物体的3D位置,在抖动后拍摄第二帧图,两个位置的坐标差异对反向补偿信号进行计算,根据计算结果对抖动进行反向补偿,补偿完成后拍摄第三帧图,对补偿前后的位置差异进行计算,并对防抖效果进行判断。该双目相机的防抖方法通过使用双目相机检测目标物体的深度距离,通过调用双目相机标定的存储数据,把双目相机的视差信息转化为目标物体的位置信息,通过多帧图片的比对判断镜头的抖动幅度,对抖动做出补偿,从而获得更为清晰的影像,同时取消了模组内的霍尔元件和gyro陀螺仪,降低设计难度。
技术研发人员:郭福德,吴要争,糜波
受保护的技术使用者:江西盛泰精密光学有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!