一种传感器模块轴系平行调节装置与调节方法与流程
1.本发明涉及传感器轴系调节技术领域,具体涉及一种传感器模块轴系平行调节装置与调节方法。
背景技术:
2.水雷磁引信传感器包含三轴磁矢量传感器和两轴(或三轴)加速度传感器。水雷磁引信通过三轴磁矢量传感器进行舰船目标磁场信号的三轴正交测量,获取舰船目标的通过特征信息并进行攻击决策。水雷布放入水后,水雷姿态一般不受控制。水雷磁引信获取的舰船目标磁场信号为载体坐标系下的数据,存在处理困难,利用不便的难题。因此,需要通过姿态传感器获取水雷姿态并将载体坐标系下的数据进行坐标转换,实现水雷磁引信大地坐标系下对舰船目标磁场信号的准确测量。两轴(或三轴)加速度传感器作为水雷磁引信的姿态传感器;水雷磁引信通过两轴(或三轴)加速度传感器进行水雷姿态测量并进行坐标转换。
3.水雷磁引信要精确的完成舰船目标磁场信号的坐标转换,即从载体坐标系到大地坐标系的测量数据转换,需要满足三轴磁矢量传感器测量轴正交理想化、两轴(或三轴)加速度传感器测量轴正交理想化、两种传感器测量轴系的平行调节。水雷磁引信使用的三轴磁矢量传感器通过机械调节和数字修正实现了测量轴的三轴正交理想化;水雷磁引信使用的微机械加速度传感器具有较高的测量轴正交度。但是磁矢量传感器测量轴坐标系与两轴(或三轴)加速度传感器测量轴坐标系的三轴平行度始终无法进行调节和修正,现有技术一般通过机械安装大致对齐的方式进行处理,存在较大的平行度误差(2
°
~5
°
),故给水雷磁引信开展舰船目标磁场信号的坐标转换引入了较大偏差。
4.因此,需要发明一种传感器模块轴系平行调节装置与调节方法,将三轴磁矢量传感器测量轴坐标系与两轴(或三轴)加速度传感器测量轴坐标系进行平行调节,消除测量轴坐标系间的不平行度,提高水雷磁引信对舰船目标磁场信号的坐标转换精度。
技术实现要素:
5.有鉴于此,本发明提供了一种传感器模块轴系平行调节装置与调节方法,能够解决如何进行磁矢量传感器和加速度传感器的测量轴坐标系的平行调节的技术问题。
6.为了解决上述技术问题,本发明是这样实现的。
7.一种传感器模块轴系平行调节装置,所述调节装置包括调节底座、磁引信传感器安装板、安装板紧固螺钉、安装板左旋调节螺钉、安装板右旋调节螺钉;
8.所述调节底座上表面开有圆形开孔,其余各面在其中心开有正方形开孔;所述调节底座内部具有与所述开孔匹配的空腔;
9.所述调节底座上表面通过安装板紧固螺钉安装有磁引信传感器安装板;
10.所述调节底座上表面开孔外侧上下设置有安装板旋转调节螺钉,通过上侧的安装板左旋调节螺钉能够使所述磁引信传感器安装板左旋,通过下侧的安装板右旋调节螺钉能
使所述磁引信传感器安装板右旋。
11.优选地,所述调节底座为正方体箱体,各面相互垂直,具有误差精度小于0.2
°
的垂直度;所述调节底座上表面开有圆形开孔,其余各面在其中心开有正方形开孔;所述调节底座内部具有与所述开孔匹配的空腔;所述调节底座上表面通过安装板紧固螺钉安装有磁引信传感器安装板;
12.所述磁引信传感器安装板为圆环型,所述磁引信传感器安装板左右侧分别开有腰型孔用于将所述磁引信传感器安装板紧固到所述调节底座上表面的圆形开孔外侧,并使所述磁引信传感器安装板能以所述调节底座上表面中心为原点进行左右旋转;所述磁引信传感器安装板内侧具有4个安装孔用于安装磁引信传感器;
13.所述调节底座上表面开孔外侧上下设置有安装板旋转调节螺钉,通过上侧的安装板左旋调节螺钉能够使所述磁引信传感器安装板左旋,通过下侧的安装板右旋调节螺钉能使所述磁引信传感器安装板右旋;通过所述磁引信传感器安装板将所述磁引信传感器安装于所述调节底座空腔中,所述磁引信传感器的磁矢量传感器位于开孔之上,所述磁引信传感器的加速度传感器位于开孔之内。
14.优选地,所述调节底座及所述磁引信传感器安装板分别具有与所述开孔对应的底座孔、安装板孔,所述磁引信传感器通过安装板孔、底座孔放置于所述空腔。
15.优选地,所述调节底座为棱长90毫米的正方体箱体,所述调节底座上表面开有直径58毫米的圆形开孔,其余各面在其中心开有边长为68毫米的正方形开孔。
16.优选地,所述加速度传感器为两轴/或三轴加速度传感器。
17.本发明所提供的一种传感器模块轴系平行调节方法,基于如前所述传感器模块轴系平行调节装置,所述调节方法包括:
18.以下步骤:
19.步骤s1:将所述传感器模块轴系平行调节装置放置在无磁水平台上,将所述磁引信传感器装入所述传感器模块轴系平行调节装置;
20.所述传感器模块轴系平行调节装置坐标系记为x'y'z';无磁水平台上,所述传感器模块轴系平行调节装置坐标系与东北天坐标系对齐;以调节装置中心为原点,水平向东为o'x'轴,水平向北为o'y'轴,竖直向天为o'z'轴;
21.所述磁引信传感器的磁矢量传感器测量轴坐标系记为xyz;在无磁水平台上,磁矢量传感器测量轴与东北天坐标系对齐,水平向东为ox轴,水平向北为oy轴,竖直向天为oz轴;
22.所述磁引信传感器的加速度传感器测量轴坐标系记为abc,在无磁水平台上,所述加速度传感器测量轴与东北天坐标系对齐,水平向东为oa轴,水平向北为ob轴,竖直向天为oc轴;
23.所述磁引信传感器装入所述传感器模块轴系平行调节装置后并放置在无磁水平台上与东北天坐标系对齐,则所述磁矢量传感器测量轴坐标系、加速度传感器测量轴坐标系及所述传感器模块轴系平行调节装置坐标系的偏差小于5
°
;将此时所述加速度传感器的输出数据作为所述加速度传感器的水平输出零点;通过无磁水平台面将所述加速度传感器测量轴坐标系平面aob与所述传感器模块轴系平行调节装置坐标系平面x'o'y'平行;
24.步骤s2:将所述传感器模块轴系平行调节装置在所述无磁水平台面上沿o'y'轴在
正负60度范围内旋转,将所述磁引信传感器安装板通过旋转调节螺钉进行左右调节,直至所述加速度传感器测量轴b的输出不发生变化;所述调节螺钉为安装板左旋调节螺钉和/或安装板右旋调节螺钉;
25.步骤s3:使所述磁矢量传感器测量轴oz竖直向上,将所述传感器模块轴系平行调节装置在所述无磁水平台面上沿o'z'轴在正负180度范围内旋转,将所述磁矢量传感器oz轴竖直调节螺钉进行前后调节,直至所述磁矢量传感器测量轴oz的输出不发生变化;
26.步骤s4:使所述磁矢量传感器测量轴ox竖直向下,将所述传感器模块轴系平行调节装置在所述无磁水平台面上沿o'x'轴在正负180度范围内旋转,将所述磁矢量传感器ox轴竖直调节螺钉进行前后调节,直至所述磁矢量传感器测量轴ox的输出不发生变化;
27.步骤s5:使所述磁矢量传感器测量轴oy竖直向上,将所述传感器模块轴系平行调节装置在所述无磁水平台面上沿o'y'轴在正负180度范围内旋转,将所述磁矢量传感器oy轴竖直调节螺钉进行前后调节,直至所述磁矢量传感器测量轴oy的输出不发生变化。
28.有益效果:
29.(1)本发明提高了轴系平行精度,将现有技术通过机械安装存在的2
°
~5
°
平行度误差降低到0.2
°
以内。
30.(2)本发明装置结构简单。
31.(3)本发明校准方法易于实施。
附图说明
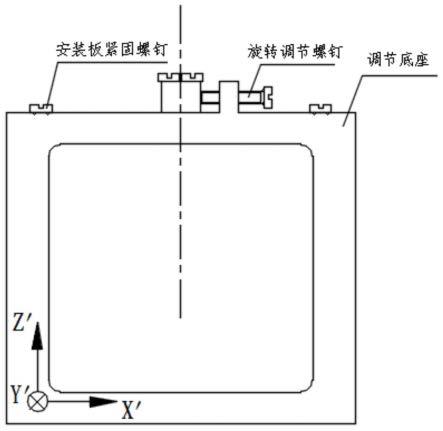
32.图1(a)为本发明提供的轴系平行调节装置正视图;
33.图1(b)为本发明提供的轴系平行调节装置俯视图;
34.图2(a)为本发明提供的调节加速度传感器aob平面平行调节装置x'o'y'平面正视图;
35.图2(b)为本发明提供的调节加速度传感器aob平面平行调节装置x'o'y'平面俯视图;
36.图3(a)为本发明提供的调节加速度传感器aob坐标系对齐调节装置x'o'y'坐标系正视图;
37.图3(b)为本发明提供的调节加速度传感器aob坐标系对齐调节装置x'o'y'坐标系俯视图;
38.图4(a)为本发明提供的调节磁矢量传感器oz轴竖直向上对齐调节装置o'z'轴正视图;
39.图4(b)为本发明提供的调节磁矢量传感器oz轴竖直向上对齐调节装置o'z'轴正视图;
40.图5(a)为本发明提供的调节磁矢量传感器ox轴竖直向下对齐调节装置o'x'轴正视图;
41.图5(b)为本发明提供的调节磁矢量传感器ox轴竖直向下对齐调节装置o'x'轴俯视图;
42.图6(a)为本发明提供的调节磁矢量传感器oy轴竖直向上对齐调节装置o'y'轴正视图;
43.图6(b)为本发明提供的调节磁矢量传感器oy轴竖直向上对齐调节装置o'y'轴俯视图。
具体实施方式
44.下面结合附图和实施例,对本发明进行详细描述。
45.如图1(a)-图1(b)所示,本发明提出了一种传感器模块轴系平行调节装置,所述调节装置包括一调节底座、磁引信传感器安装板、安装板紧固螺钉、安装板左旋调节螺钉、安装板右旋调节螺钉。
46.所述调节底座上表面开有圆形开孔,其余各面在其中心开有正方形开孔;所述调节底座内部具有与所述开孔匹配的空腔;
47.所述调节底座上表面通过安装板紧固螺钉安装有磁引信传感器安装板;
48.所述调节底座上表面开孔外侧上下设置有安装板旋转调节螺钉,通过上侧的安装板左旋调节螺钉能够使所述磁引信传感器安装板左旋,通过下侧的安装板右旋调节螺钉能使所述磁引信传感器安装板右旋。
49.进一步地,所述调节底座为正方体箱体,各面相互垂直,具有误差精度小于0.2
°
的垂直度;所述调节底座上表面开有圆形开孔,其余各面在其中心开有正方形开孔;所述调节底座内部具有与所述开孔匹配的空腔;所述调节底座上表面通过安装板紧固螺钉安装有磁引信传感器安装板。所述磁引信传感器安装板为圆环型,所述磁引信传感器安装板左右侧分别开有腰型孔用于将所述磁引信传感器安装板紧固到所述调节底座上表面的圆形开孔外侧,并使所述磁引信传感器安装板能以所述调节底座上表面中心为原点进行左右旋转;所述磁引信传感器安装板内侧具有4个安装孔用于安装磁引信传感器。所述调节底座上表面开孔外侧上下设置有安装板旋转调节螺钉,通过上侧的安装板左旋调节螺钉能够使所述磁引信传感器安装板左旋,通过下侧的安装板右旋调节螺钉能使所述磁引信传感器安装板右旋。通过所述磁引信传感器安装板将所述磁引信传感器安装于所述调节底座空腔中,所述磁引信传感器的磁矢量传感器位于开孔之上,所述磁引信传感器的加速度传感器位于开孔之内。
50.所述调节底座用于提供正交平面,所述调节底座上安装所述磁引信传感器安装板,所述磁引信传感器安装板用于安装磁引信传感器并实现以调节底座上表面中心为原点进行左右旋转。
51.进一步地,所述调节底座及所述磁引信传感器安装板分别具有与所述开孔对应的底座孔、安装板孔,所述磁引信传感器通过安装板孔、底座孔放置于所述空腔,所述磁引信传感器的加速度传感器位于所述空腔内,所述磁矢量传感器位于所述调节装置外部;所述调节螺钉用于磁引信传感器安装板左右旋转调节、所述紧固螺钉用于将所述磁引信传感器安装板紧固在调节底座上表面圆形开孔外侧所述磁引信传感器包括磁矢量传感器和加速度传感器。
52.进一步地,所述调节底座为棱长90毫米的正方体箱体,所述调节底座上表面开有直径58毫米的圆形开孔,其余各面在其中心开有边长为68毫米的正方形开孔。
53.进一步地,所述加速度传感器为两轴/或三轴加速度传感器。
54.如图2(a)-图6(b)所示,本发明还提供了一种传感器模块轴系平行调节方法,所述
调节方法基于如前所述的传感器模块轴系平行调节装置,所述调节方法包括以下步骤:
55.步骤s1:将所述传感器模块轴系平行调节装置放置在无磁水平台上,将所述磁引信传感器装入所述传感器模块轴系平行调节装置。所述传感器模块轴系平行调节装置坐标系记为x'y'z';无磁水平台上,所述传感器模块轴系平行调节装置坐标系与东北天坐标系对齐;以调节装置中心为原点,水平向东为o'x'轴,水平向北为o'y'轴,竖直向天为o'z'轴。所述磁引信传感器的磁矢量传感器测量轴坐标系记为xyz;在无磁水平台上,磁矢量传感器测量轴与东北天坐标系对齐,水平向东为ox轴,水平向北为oy轴,竖直向天为oz轴。所述磁引信传感器的加速度传感器测量轴坐标系记为abc,在无磁水平台上,所述加速度传感器测量轴与东北天坐标系对齐,水平向东为oa轴,水平向北为ob轴,竖直向天为oc轴。所述磁引信传感器装入所述传感器模块轴系平行调节装置后并放置在无磁水平台上与东北天坐标系对齐,则所述磁矢量传感器测量轴坐标系、加速度传感器测量轴坐标系及所述传感器模块轴系平行调节装置坐标系的偏差小于5
°
;将此时所述加速度传感器的输出数据作为所述加速度传感器的水平输出零点;通过无磁水平台面将所述加速度传感器测量轴坐标系平面aob与所述传感器模块轴系平行调节装置坐标系平面x'o'y'平行。
56.本发明中,利用重力加速度水平分量为0的特性实现通过无磁水平台面将所述加速度传感器测量轴坐标系平面(aob)与所述传感器模块轴系平行调节装置坐标系平面(x'o'y')平行。
57.本发明中,所述无磁水平台上记录加速度传感器水平输出为零点,实现了加速度测量轴oa和测量轴ob在水平面内。所述传感器模块轴系平行调节装置在无磁水平台面上,传感器模块轴系平行调节装置坐标系平面(x'o'y')在水平面内。
58.步骤s2:将所述传感器模块轴系平行调节装置在所述无磁水平台面上沿o'y'轴在正负60度范围内旋转,将所述磁引信传感器安装板通过旋转调节螺钉进行左右调节,直至所述加速度传感器测量轴b的输出不发生变化;所述调节螺钉为安装板左旋调节螺钉和/或安装板右旋调节螺钉。
59.本发明利用重力加速度水平分量为0的特性实现所述加速度传感器测量轴坐标系aob与所述传感器模块轴系平行调节装置的坐标系x'o'y'对齐平行。
60.本发明中,加速度传感器测量轴ob,如果与所述传感器模块轴系平行调节装置坐标系轴o'y'不重合,则所述传感器模块轴系平行调节装置在无磁水平台面上沿o'y'轴正负60度范围旋转时,加速度传感器测量轴ob在重力加速度竖直分量上就有投影,测量轴b输出会发生变化。通过旋转磁引信传感器安装板的调节,使加速度传感器测量轴ob与所述传感器模块轴系平行调节装置坐标系轴o'y'重合,加速度传感器测量轴ob只在重力加速度水平分量上有投影,重力加速度水平分量为0,所述传感器模块轴系平行调节装置在无磁水平台面上沿o'y'轴正负60度范围旋转时,测量轴b输出不发生变化。
61.步骤s3:使所述磁矢量传感器测量轴oz竖直向上,将所述传感器模块轴系平行调节装置在所述无磁水平台面上沿o'z'轴在正负180度范围内旋转,将所述磁矢量传感器oz轴竖直调节螺钉进行前后调节,直至所述磁矢量传感器测量轴oz的输出不发生变化。
62.本发明利用地磁竖直分量不变的特性实现三轴磁矢量传感器测量轴oz与所述传感器模块轴系平行调节装置的坐标系o'z'平行。
63.步骤s4:使所述磁矢量传感器测量轴ox竖直向下,将所述传感器模块轴系平行调
节装置在所述无磁水平台面上沿o'x'轴在正负180度范围内旋转,将所述磁矢量传感器ox轴竖直调节螺钉进行前后调节,直至所述磁矢量传感器测量轴ox的输出不发生变化。
64.本发明利用地磁竖直分量不变的特性实现三轴磁矢量传感器测量轴ox与所述传感器模块轴系平行调节装置的坐标系o'x'平行。
65.步骤s5:使所述磁矢量传感器测量轴oy竖直向上,将所述传感器模块轴系平行调节装置在所述无磁水平台面上沿o'y'轴在正负180度范围内旋转,将所述磁矢量传感器oy轴竖直调节螺钉进行前后调节,直至所述磁矢量传感器测量轴oy的输出不发生变化。
66.本发明利用地磁竖直分量不变的特性实现三轴磁矢量传感器测量轴oy与所述传感器模块轴系平行调节装置的坐标系o'y'平行。
67.通过步骤s1和步骤s2,利用无磁水平台面和所述传感器模块轴系平行调节装置,将加速度传感器测量轴坐标系(abc)与调节装置的坐标系(x'y'z')进行对齐。通过步骤s3-步骤s5,利用无磁水平台面和所述传感器模块轴系平行调节装置将三轴磁矢量传感器测量轴坐标系(xyz)与所述传感器模块轴系平行调节装置的坐标系(x'y'z')进行对齐。最终实现磁矢量传感器与加速度传感器测量轴系的平行对齐,对齐精度可达到所述传感器模块轴系平行调节装置固有误差的精度,即传感器测量轴系的平行度误差约为0.2
°
。本发明中,对齐精度由所述传感器模块轴系平行调节装置的固有精度决定。
68.本发明提供的磁矢量传感器与加速度传感器测量轴系平行调节的装置和方法,可将原来通过机械安装大致对齐存在的2
°
~5
°
平行度误差降低到0.2
°
,极大提升磁引信性能。
69.以上的具体实施例仅描述了本发明的设计原理,该描述中的部件形状,名称可以不同,不受限制。所以,本发明领域的技术人员可以对前述实施例记载的技术方案进行修改或等同替换;而这些修改和替换未脱离本发明创造宗旨和技术方案,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1