一种单兵运动靶姿态切换方法及系统与流程
本申请涉及军事训练设备,特别涉及一种单兵运动靶姿态切换方法及系统。
背景技术:
1、在智能化的军事训练系统中,要求靶标能够模拟士兵运动,同时也要根据进攻方的位置和进攻方向进行隐现和靶面切换,用来模拟士兵的立、跪、卧姿态,而在运动过程中也要朝向进攻方的进攻方向。基于这种需求,目前主要通过人工换靶的方式实现靶标姿态的模拟切换。但是在合同战术训练中,红方在运动中进行实弹射击,人工更换靶板实现蓝军的姿态切换就变得不合实际。更主要的是蓝军的单兵运动靶也是在实时运动中,其运动方向不确定,这增加了单兵运动靶的不确定性和随机性,要想实现靶面的实时切换和始终朝向进攻方的进攻方向,这对单兵运动靶提出了较高的技术和控制要求。
2、为了达到靶面朝向的控制,公开号为cn114857991a的发明专利申请公开了一种战术训练中靶机靶面自动跟踪射击方向的控制方法及系统,该专利在远近距离射击情况下,使整个防守分队的靶面方向调整至面向进攻分队,但是并未公开如何进行靶面调整,也未涉及到姿态切换的相关内容。
技术实现思路
1、本申请实施例提供了一种单兵运动靶姿态切换方法及系统,用以解决现有技术中无法进行对靶标的姿态切换控制以及调整靶面朝向的问题。
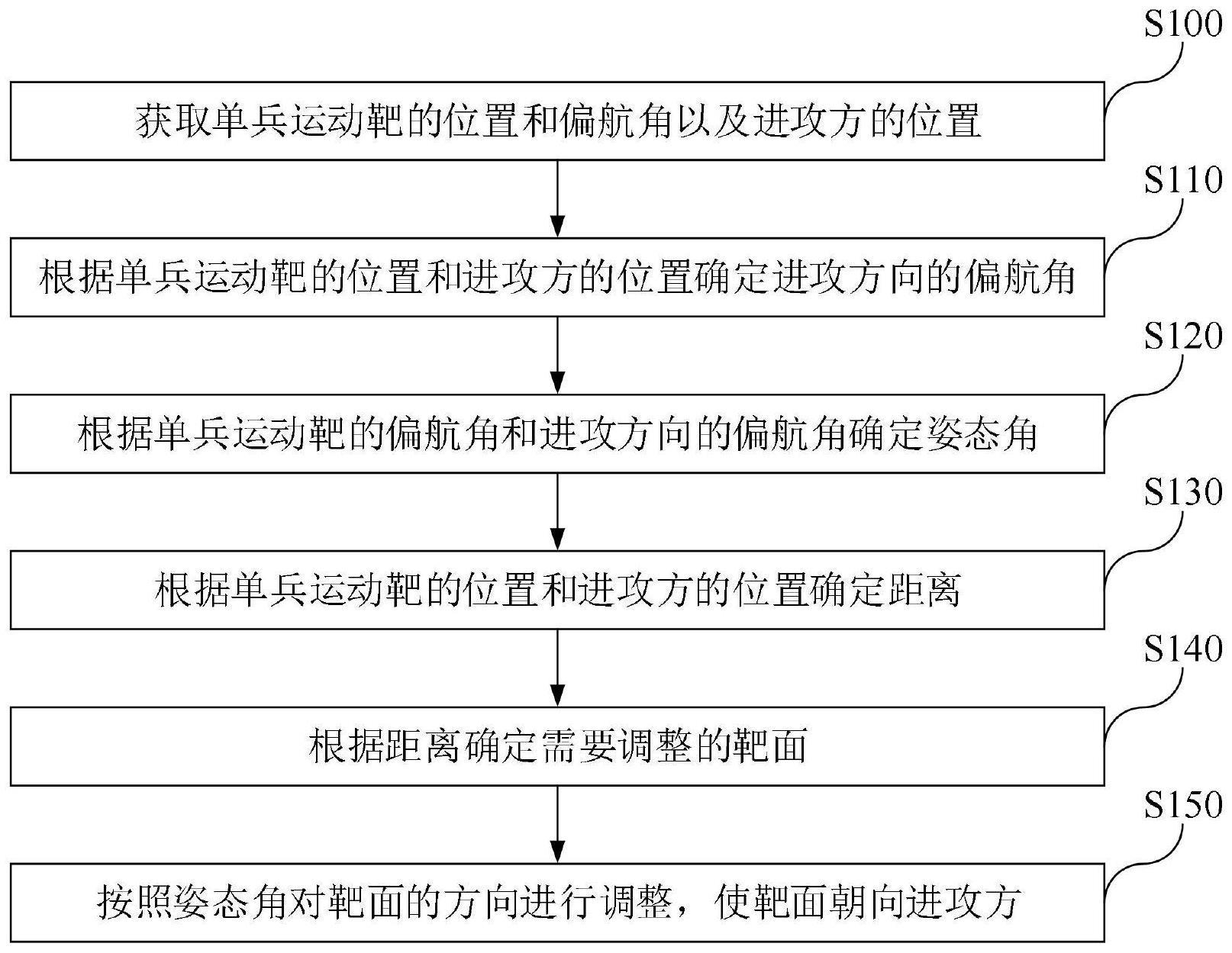
2、一方面,本申请实施例提供了一种单兵运动靶姿态切换方法,包括:
3、获取单兵运动靶的位置和偏航角以及进攻方的位置;
4、根据单兵运动靶的位置和进攻方的位置确定进攻方向的偏航角;
5、根据单兵运动靶的偏航角和进攻方向的偏航角确定姿态角;
6、根据单兵运动靶的位置和进攻方的位置确定距离;
7、根据距离确定需要调整的靶面;
8、按照姿态角对靶面的方向进行调整,使靶面朝向进攻方。
9、另一方面,本申请实施例还提供了一种单兵运动靶姿态切换系统,包括:
10、靶标定位定向单元,用于获取单兵运动靶的位置和偏航角;
11、进攻方定位单元,用于获取进攻方的位置;
12、主控装置,用于根据单兵运动靶的位置和进攻方的位置确定进攻方向的偏航角,根据单兵运动靶的位置和进攻方的位置确定距离,根据距离确定需要调整的靶面;
13、控制器,根据单兵运动靶的偏航角和进攻方向的偏航角确定姿态角;
14、执行机构,用于按照姿态角对靶面的方向进行调整,使靶面朝向进攻方。
15、本申请中的一种单兵运动靶姿态切换方法及系统,具有以下优点:
16、1、通过闭环控制的方式,根据进攻方的位置和进攻方向,实时切换靶面朝向进攻方的进攻方向,来模拟士兵的姿态切换,且实时调整。
17、2、采用北斗地基增强系统使设备的定位精度精确到厘米级,大大提高了姿态切换的控制精度。
18、3、对提高部队的训练水平提供了新的方式。
19、4、大大节约了部队保障维护人力和物力。
技术特征:
1.一种单兵运动靶姿态切换方法,其特征在于,包括:
2.根据权利要求1所述的一种单兵运动靶姿态切换方法,其特征在于,所述获取单兵运动靶的位置和偏航角以及进攻方的位置,包括:
3.根据权利要求1所述的一种单兵运动靶姿态切换方法,其特征在于,所述根据单兵运动靶的位置和进攻方的位置确定进攻方向的偏航角,包括:
4.根据权利要求1所述的一种单兵运动靶姿态切换方法,其特征在于,所述根据所述距离确定需要调整的靶面,包括:
5.根据权利要求4所述的一种单兵运动靶姿态切换方法,其特征在于,所述距离阈值包括依次增大的第一距离阈值、第二距离阈值和第三距离阈值,所述靶面包括立姿靶面、跪姿靶面和卧姿靶面,如果所述距离小于或等于所述第一距离阈值,确定所述卧姿靶面为需要调整的靶面;如果所述距离大于所述第一距离阈值且小于或等于所述第二距离阈值,确定所述跪姿靶面为需要调整的靶面;如果所述距离大于所述第二距离阈值且小于或等于所述第三距离阈值,确定所述立姿靶面为需要调整的靶面。
6.根据权利要求1所述的一种单兵运动靶姿态切换方法,其特征在于,在按照所述姿态角对所述靶面的方向进行调整时,将所述姿态角发送至旋转控制器,所述旋转控制器控制旋转电机转动,调整所述靶面的方向,通过编码器采集所述旋转电机的转动角度,所述旋转控制器根据所述转动角度和姿态角对所述旋转电机进行闭环控制。
7.一种单兵运动靶姿态切换系统,其特征在于,包括:
8.根据权利要求7所述的一种单兵运动靶姿态切换系统,其特征在于,所述靶标定位定向单元包括定位天线和定向天线,所述定位天线和定向天线分别设置在单兵运动靶的尾部和头部,单兵运动靶的偏航角为尾部指向头部的向量与真北方向的夹角。
9.根据权利要求7所述的一种单兵运动靶姿态切换系统,其特征在于,所述执行机构包括旋转控制器、旋转电机和编码器,所述旋转控制器获取所述姿态角后控制所述旋转电机转动,以调整所述靶面的方向,所述编码器采集所述旋转电机的转动角度,所述旋转控制器根据所述转动角度和姿态角对所述旋转电机进行闭环控制。
技术总结
本申请公开了一种单兵运动靶姿态切换方法和系统,方法包括:获取单兵运动靶的位置和偏航角以及进攻方的位置;根据单兵运动靶的位置和进攻方的位置确定进攻方向的偏航角;根据单兵运动靶的偏航角和进攻方向的偏航角确定姿态角;根据单兵运动靶的位置和进攻方的位置确定距离;根据距离确定需要调整的靶面;按照姿态角对靶面的方向进行调整,使靶面朝向进攻方。本申请能够根据进攻方的位置和进攻方向,实时切换靶面朝向进攻方的进攻方向,并根据需要切换靶面的姿态。
技术研发人员:常文超,王伟俊,孟祥廷,许长华,徐中节,解海,马玉杰
受保护的技术使用者:西安航天动力研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!