一种装甲起倒靶机的制作方法
本技术涉及靶机,具体是一种装甲起倒靶机。
背景技术:
1、在军队、武警部队的日常训练中,射击打靶是不可缺少的训练项目,现有的靶机通常都是直接竖直固定在训练场所,不便于模拟假象敌横向移动(装甲)目标,影响训练的效果。
技术实现思路
1、本实用新型的目的在于提供一种装甲起倒靶机,以解决上述背景技术中提出的现有的靶机通常都是直接竖直固定在训练场所,不便于模拟假象敌横向移动(装甲)目标,影响训练的效果。
2、为实现上述目的,本实用新型提供如下技术方案:
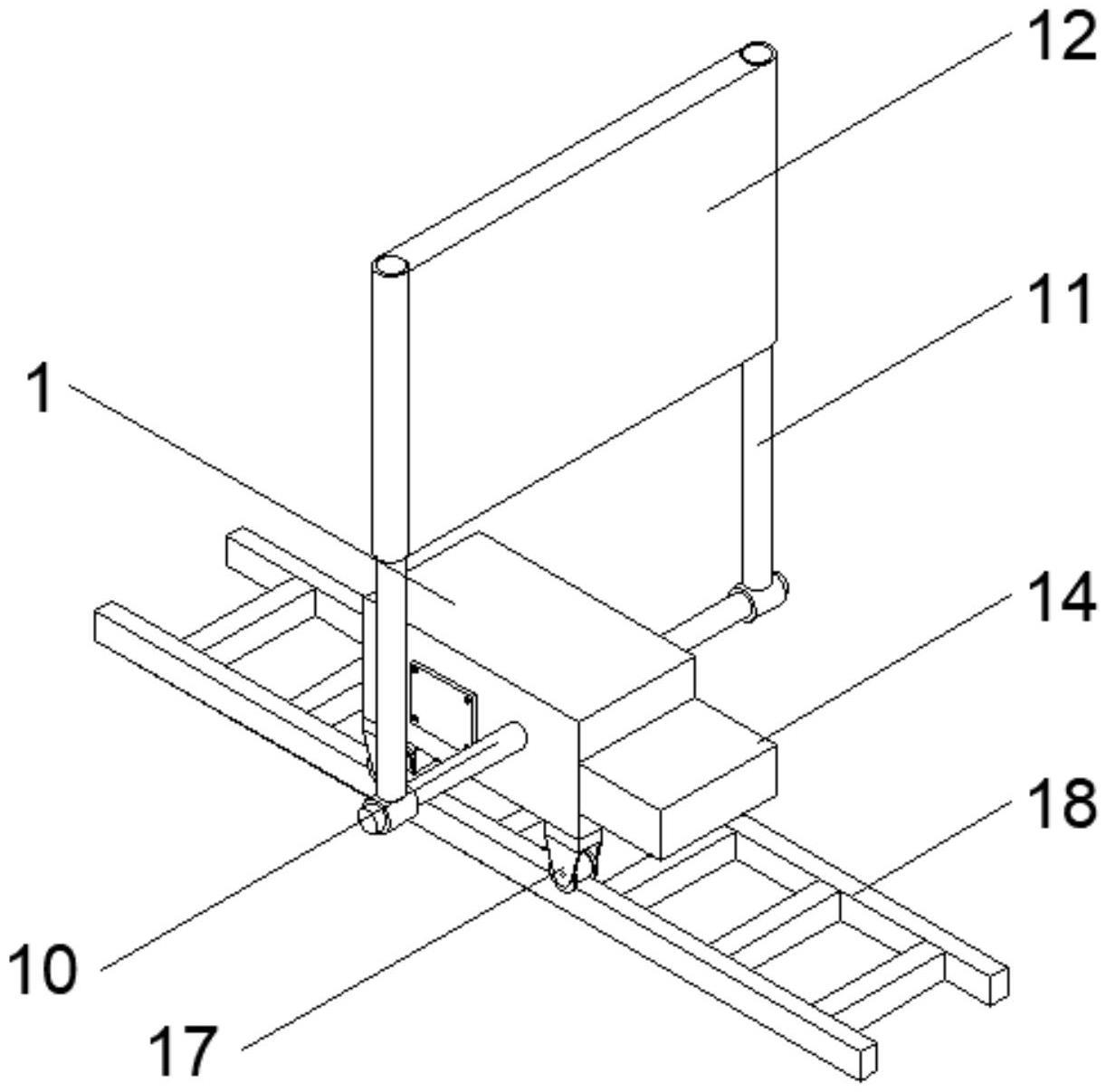
3、一种装甲起倒靶机,包括控制箱,控制箱的内部横向设置有支撑板,支撑板的上表壁左侧固定连接有双轴电机,双轴电机的两个输出轴顶端均固定连接有传动杆,两个传动杆的一端均固定连接有齿轮,位于两个齿轮的下部啮合连接有弧形齿条,两个弧形齿条的一端固定连接有连接杆,两个连接杆的一端下表壁均固定连接有转动块,两个转动块共同固定连接有转动杆,转动杆的两端均贯穿控制箱的两侧壁并固定连接有立柱,两个立柱的一端共同固定连接有靶标。
4、作为本实用新型再进一步的方案:其中,支撑板的上表壁右侧固定安装有控制器,且控制器与双轴电机电性连接,控制器可以控制双轴电机转动。
5、作为本实用新型再进一步的方案:其中,位于支撑板的下部控制箱下表壁固定安装有行走电机,行走电机的两个输出轴均固定连接有移动轮,且控制箱的下表壁一侧设置有与移动轮相对应的从动轮。
6、作为本实用新型再进一步的方案:其中,控制箱的右侧壁固定连接有电源箱,电源箱的内部设置有电池,电池可以给装置提供电力。
7、作为本实用新型再进一步的方案:其中,支撑板的上表壁中部固定连接有隔板,隔板的上表壁与控制箱固定连接,隔板可以有效的保护控制器。
8、作为本实用新型再进一步的方案:其中,位于移动轮和从动轮的下部设置有轨道,且移动轮和从动轮均与轨道相接触,轨道便于移动轮和从动轮的移动。
9、与现有技术相比,本实用新型的有益效果是:
10、本实施例中的靶机,通过设置控制箱,并在控制箱内设置双轴电机、齿轮、弧形齿条和连接杆,双轴电机可以通过齿轮带动弧形齿条移动,从而通过连接杆带动转动杆和立柱进行倾倒或者立起,通过设置行走电机和移动轮,行走电机带动移动轮在轨道上移动,便可以实现模拟假想敌横向移动(装甲)目标,便于对部队装甲反应速度、瞄准射击等战斗的训练,提升训练效果。
技术特征:
1.一种装甲起倒靶机,包括控制箱(1),其特征在于,所述控制箱(1)的内部横向设置有支撑板(2),所述支撑板(2)的上表壁左侧固定连接有双轴电机(4),所述双轴电机(4)的两个输出轴顶端均固定连接有传动杆(5),两个所述传动杆(5)的一端均固定连接有齿轮(6),位于两个所述齿轮(6)的下部啮合连接有弧形齿条(7),两个所述弧形齿条(7)的一端固定连接有连接杆(8),两个所述连接杆(8)的一端下表壁均固定连接有转动块(9),两个所述转动块(9)共同固定连接有转动杆(10),所述转动杆(10)的两端均贯穿控制箱(1)的两侧壁并固定连接有立柱(11),两个所述立柱(11)的一端共同固定连接有靶标(12)。
2.根据权利要求1所述的一种装甲起倒靶机,其特征在于,所述支撑板(2)的上表壁右侧固定安装有控制器(13),且所述控制器(13)与双轴电机(4)电性连接。
3.根据权利要求1所述的一种装甲起倒靶机,其特征在于,位于所述支撑板(2)的下部所述控制箱(1)下表壁固定安装有行走电机(16),所述行走电机(16)的两个输出轴均固定连接有移动轮(17),且所述控制箱(1)的下表壁一侧设置有与移动轮(17)相对应的从动轮。
4.根据权利要求1所述的一种装甲起倒靶机,其特征在于,所述控制箱(1)的右侧壁固定连接有电源箱(14),所述电源箱(14)的内部设置有电池(15)。
5.根据权利要求1所述的一种装甲起倒靶机,其特征在于,所述支撑板(2)的上表壁中部固定连接有隔板(3),所述隔板(3)的上表壁与控制箱(1)固定连接。
6.根据权利要求3所述的一种装甲起倒靶机,其特征在于,位于所述移动轮(17)和从动轮的下部设置有轨道(18),且移动轮(17)和从动轮均与轨道(18)相接触。
技术总结
本技术公开了一种装甲起倒靶机,属于靶机技术领域,包括控制箱,控制箱的内部横向设置有支撑板,支撑板的上表壁左侧固定连接有双轴电机,双轴电机的两个输出轴顶端均固定连接有传动杆,两个传动杆的一端均固定连接有齿轮,位于两个齿轮的下部啮合连接有弧形齿条。本技术通过设置控制箱,并在控制箱内设置双轴电机、齿轮、弧形齿条和连接杆,双轴电机可以通过齿轮带动弧形齿条移动,从而通过连接杆带动转动杆和立柱进行倾倒或者立起,通过设置行走电机和移动轮,行走电机带动移动轮在轨道上移动,便可以实现模拟假象敌横向移动目标,便于对部队装甲反应速度、瞄准射击等战斗的训练,提升训练效果。
技术研发人员:高卫卫,高东东,李海明,宋宣利,龙向军
受保护的技术使用者:山东蓝剑智能装备科技有限公司
技术研发日:20221228
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!