一种用于军事的智能靶标装置的制作方法
本技术涉及靶标相关领域,尤其涉及一种用于军事的智能靶标装置。
背景技术:
1、在一般情况下,靶标是指一个特定的目标或对象,在军事上,靶标通常是指一个具体的物体或地点,需要被攻击或摧毁,它可以是敌人的设施或装备,也可以是一个地方,需要被控制或占领。
2、但是,目前市场上大多数的靶标不能达到智能化,场地固定、显示单一、价格昂贵、隐患较多、保障困难的靶标系统等问题严重地制约军事训练成绩的提高,无法提供高效、逼真的训练环境。
技术实现思路
1、因此,为了解决上述不足,本实用新型提供一种用于军事的智能靶标装置。
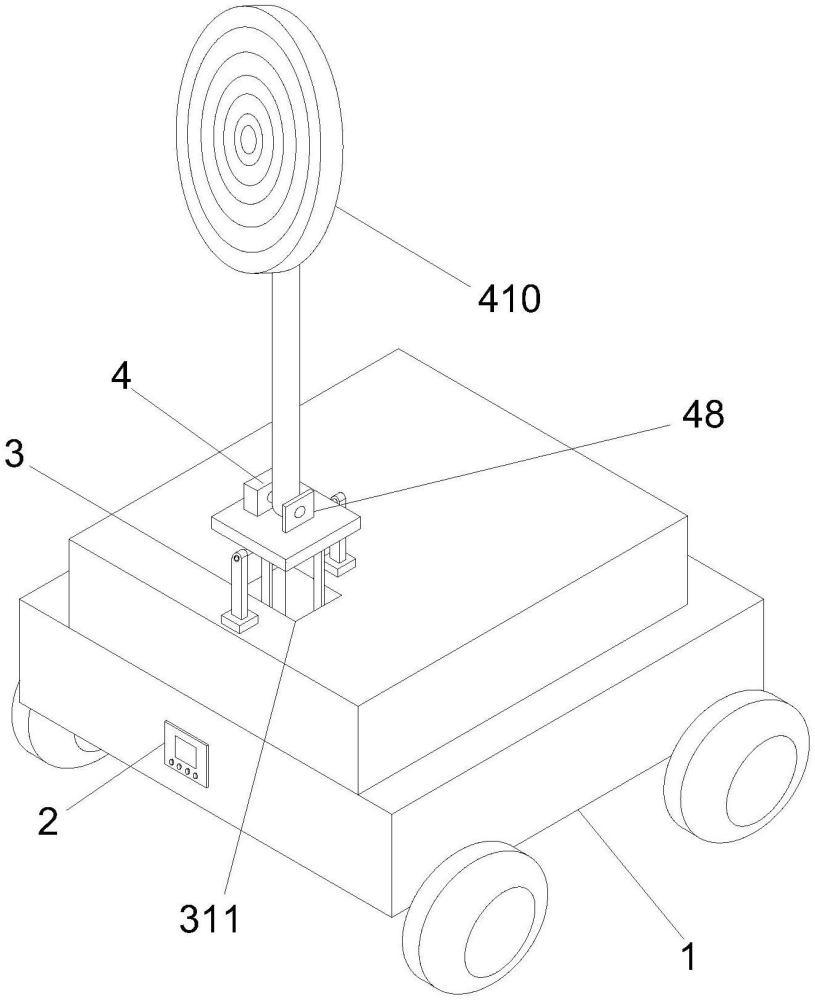
2、为了实现上述目的,本实用新型采取以下技术方案:一种用于军事的智能靶标装置,包括电动小车、plc控制器、摇摆结构和隐显靶结构,所述电动小车的前侧中部安装有plc控制器,所述电动小车的上侧设置有摇摆结构,所述摇摆结构的上侧固定有隐显靶结构;所述摇摆结构包括第一外壳、矩形槽、固定块、电动推杆、连接柱、直杆、第一摆动结构、第二摆动结构和矩形板,所述第一外壳的上端面前侧开设有矩形槽,所述第一外壳的右侧固定有固定块,所述固定块的左端面中部固定有电动推杆,所述电动推杆的伸缩杆固定有连接柱,所述连接柱被直杆所贯穿,所述直杆的左右两侧分别固定有第一摆动结构和第二摆动结构,所述第一摆动结构和第二摆动结构的上侧固定有矩形板,所述第一外壳固定于电动小车的上端面;所述隐显靶结构包括第二外壳、固定座、连接座、气缸、第一连杆、第二连杆、转动轴、支撑板、支撑杆和靶标,所述第二外壳的内部后侧固定有固定座,所述固定座通过转轴与连接座转动连接,所述连接座的前侧固定有气缸,所述气缸的前侧固定有第一连杆,所述第一连杆通过转轴与第二连杆转动连接,所述第二连杆的前侧上端与转动轴的一端转动连接,且转动轴的另一端与支撑板的中部转动连接,所述支撑杆的下侧被转动轴所贯穿,所述支撑杆的上侧前端面固定有靶标,所述第二外壳固定于矩形板的左侧。
3、可选的,所述第一摆动结构包括第三连杆、旋转轴、第四连杆、支座和连接块,所述第三连杆的上侧通过旋转轴与第四连杆的上侧转动连接,所述第四连杆的下侧固定有支座,所述连接块的中部被第三连杆所贯穿,所述连接块的上侧与矩形板固定连接。
4、可选的,所述电动推杆呈倾斜角度设置,更利于摇摆结构能够进行往复摆动。
5、可选的,所述第一摆动结构和第二摆动结构的结构一致,便于第一摆动结构和第二摆动结构同步进行摆动。
6、可选的,所述转动轴的右侧有凸起,避免了隐显靶结构的支撑杆可能会造成滑动的结果。
7、本实用新型的有益效果:
8、本实用新型是一种用于军事的智能靶标装置,通过设置了摇摆结构,利用电动推杆推动连接柱,带动第一摆动结构和第二摆动结构进行移动,使得矩形板进行往复摆动,实现作为摆动靶标的作用,通过设置了隐显靶结构,利用气缸控制第一连杆与第二连杆之间的角度,使得靶标能够通过旋转轴进行隐靶和显靶,通过设置了电动小车和plc控制器,利用编程能够自主进行控制靶标的移动和间隔时间,达到了智能化的效果,提供了高效逼真的训练环境,避免了市场上靶标场地固定、显示单一、价格昂贵、隐患较多、保障困难等问题。
技术特征:
1.一种用于军事的智能靶标装置,其特征在于包括电动小车(1)、plc控制器(2)、摇摆结构(3)和隐显靶结构(4),所述电动小车(1)的前侧中部安装有plc控制器(2),所述电动小车(1)的上侧设置有摇摆结构(3),所述摇摆结构(3)的上侧固定有隐显靶结构(4);
2.根据权利要求1所述一种用于军事的智能靶标装置,其特征在于:所述第一摆动结构(36)包括第三连杆(361)、旋转轴(362)、第四连杆(363)、支座(364)和连接块(365),所述第三连杆(361)的上侧通过旋转轴(362)与第四连杆(363)的上侧转动连接,所述第四连杆(363)的下侧固定有支座(364),所述连接块(365)的中部被第三连杆(361)所贯穿,所述连接块(365)的上侧与矩形板(38)固定连接。
3.根据权利要求1所述一种用于军事的智能靶标装置,其特征在于:所述电动推杆(33)呈倾斜角度设置。
4.根据权利要求1所述一种用于军事的智能靶标装置,其特征在于:所述第一摆动结构(36)和第二摆动结构(37)的结构一致。
5.根据权利要求1所述一种用于军事的智能靶标装置,其特征在于:转动轴(47)的右侧有凸起。
技术总结
本技术公开了一种用于军事的智能靶标装置,包括电动小车、PLC控制器、摇摆结构和隐显靶结构,本技术通过设置了摇摆结构,利用电动推杆推动连接柱,带动第一摆动结构和第二摆动结构进行移动,使得矩形板进行往复摆动,实现作为摆动靶标的作用,通过设置了隐显靶结构,利用气缸控制第一连杆与第二连杆之间的角度,使得靶标能够通过旋转轴进行隐靶和显靶,通过设置了电动小车和PLC控制器,利用编程能够自主进行控制靶标的移动和间隔时间,达到了智能化的效果,提供了高效逼真的训练环境,避免了市场上靶标场地固定、显示单一、价格昂贵、隐患较多、保障困难等问题。
技术研发人员:齐京京
受保护的技术使用者:北京奥列科技有限公司
技术研发日:20230904
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!