射击机构、射击机器人及射击方法
本发明涉及机器人射击的,具体提供一种射击机构、射击机器人及射击方法。
背景技术:
1、射击机器人在机器人竞赛、娱乐和消防救援等领域得到广泛应用。现有的射击机器人通常由发射机构和底盘组成。发射机构包括云台、射击机构和图像传输系统等。云台能够实现yaw轴(往左往右)和pitch轴(往上往下)的灵活转动,射击机构通常采用摩擦轮高速旋转挤压弹丸的方案,底盘部分通常采用可全向移动的麦克纳姆轮底盘或全向轮底盘。
2、然而,在实际的应用场景中,发明人发现,现有的射击机构在工作时存在一些问题。首先,射击机构在进行转向运动如进行yaw轴和pitch轴的移动时会产生较大的振动,这种振动会影响射击机构发射弹丸的命中率和精确度。此外,振动还可能导致图像传输系统的图像模糊,影响操作者对目标的准确判断和射击。
3、因而,上述存在的技术问题亟待解决。
技术实现思路
1、本发明为解决上述问题,提供了一种射击机构、射击机器人及射击方法。
2、本发明第一方面提供一种射击机构,其中,所述射击机构包括射击装置和调节装置,其中:
3、所述射击装置包括间隔设置的摩擦轮,所述调节装置与所述射击装置的至少一个摩擦轮连接,通过所述调节装置,所述摩擦轮之间的间距被配置为可调节。
4、优选的,所述射击装置还包括储弹机构和发射机构,其中:
5、所述储弹机构包括弹仓、弹仓盖、舵机、拨盘、拨盘电机和弹丸输送器,所述弹仓盖和所述舵机固定在所述弹仓上,所述弹丸输送器固定在所述发射机构的固定板上,且所述弹丸输送器的内部凸起与所述拨盘电机连接,所述拨盘电机与所述拨盘相连接;
6、所述发射机构包括枪管、加速管、保护壳和固定板,所述加速管固定在所述发射机构的固定板上,所述加速管的首尾两端分别与所述弹丸输送器和所述枪管连接,所述保护壳固定在所述发射机构的固定板上,所述射击装置通过所述拨盘电机将储存的弹丸输送给所述拨盘,当所述弹丸通过所述拨盘进入所述加速管后,通过所述间隔设置的摩擦轮以高速旋转挤压所述弹丸,以将对应的弹丸送入所述枪管,从而完成发射动作。
7、优选的,所述射击机构还包括底座和云台装置,所述云台装置的下部分和上部分别连接所述底座和所述射击装置,其中:
8、所述云台装置至少具备yaw轴和pitch轴的转动,所述云台装置能够使得所述射击装置进行yaw轴和pitch轴的转动。
9、优选的,所述底座采用铝材搭建,包括第一铝型材、第二铝型材、第三铝型材和钣金连接件,其中:
10、所述第一铝型材相互搭接形成底架,所述第三铝型材相互搭接形成顶架,所述第二铝型材设于所述顶架和所述底架之间;
11、所述钣金连接件分别连接所述第二铝型材和/或所述顶架;
12、所述钣金连接件分别连接所述底架和/或所述第二铝型材。
13、优选的,所述云台装置包括水平云台和俯仰云台,其中:
14、所述水平云台包括yaw轴电机、轴承、支撑柱、轴承固定板和底板,所述底板的外部孔与所述底座连接,所述底板的中部孔通过所述支撑柱、所述轴承的外部孔和所述轴承固定板连接,所述底板的内部孔与所述yaw轴电机连接;
15、所述俯仰云台包括pitch轴电机、pitch轴电机连接轴和云台,所述云台通过所述轴承的内部孔和所述yaw轴电机转子与所述水平云台连接,所述pitch轴电机连接轴将pitch轴电机与云台连接。
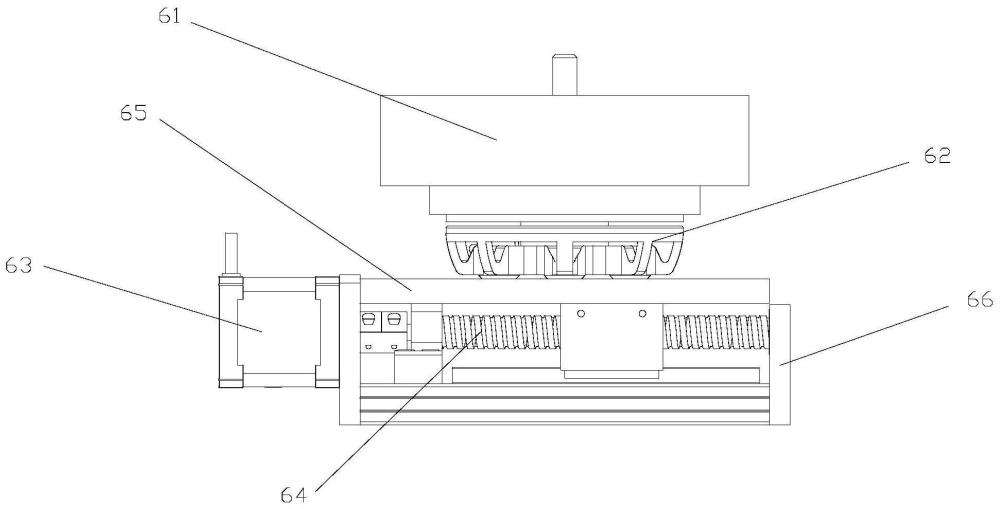
16、优选的,所述射击装置还包括摩擦轮电机,所述调节装置包括两个,每一所述调节装置均包括调节电机、丝杆、直线导轨和外壳,其中:
17、所述外壳呈水平布置,所述调节电机设于所述外壳的外部并与所述外壳的内部的丝杆连接,所述直线导轨与所述丝杆螺纹连接;
18、所述摩擦轮电机与所述摩擦轮连接,一个所述直线导轨与所述摩擦轮的一个连接,另一个所述直线导轨与所述摩擦轮的另一个连接。
19、优选的,所述射击装置还包括摩擦轮电机,所述调节装置包括两个,每一所述调节装置均包括直线电机,一个所述直线电机与所述摩擦轮的一个连接,另一个所述直线电机与所述摩擦轮的另一个连接。
20、优选的,所述射击机构还包括控制系统,所述控制系统包括蓝牙模块、驱动模块、控制模块和供电模块,其中,
21、所述蓝牙模块与所述控制模块连接,用于传递接收到的控制信号给所述控制模块,所述控制模块与所述驱动模块连接,用于向所述驱动模块传递位置控制信号和转矩控制信号,所述驱动模块分别连接并驱动所述云台装置、所述射击装置和所述调节装置,所述供电模块与所述蓝牙模块、所述驱动模块、所述控制模块、所述云台装置、所述射击装置和调所述节装置连接,用于提供各模块所需的能量;
22、所述控制系统用于控制所述射击装置、所述云台装置和所述调节装置的运动。
23、本发明第二方面提供一种射击机器人,其中,所述射击机器人包括可移动装置及本发明第一方面任一项所述射击机构。
24、本发明第三方面提供一种射击方法,射击方法应用于如上述本发明第一方面任一项所述的射击机构本发明第二方面所述的射击机器人,其中,所述方法包括:
25、根据弹丸落点的位置控制所述调节装置,以调整所述摩擦轮的位置,从而使所述弹丸落点的位置满足预设条件。
26、与现有技术相比,本发明能够取得如下有益效果:
27、在实际应用场景中,现有的射击机构沿相应运动轴如沿yaw轴和pitch轴移动时会产生较大的振动,进而影响射击机构发射弹丸的命中率和精确度,而在本发明提供的上述实施例中,通过对射击装置配置有能够调节间隔设置的摩擦轮距的调节装置,以使得在实际应用场景中,当由于发生运动振动而影响摩擦轮的间距时,可以通过观察弹丸落点,以通过调节装置及时调节摩擦轮间距,从而确保发射精度的准确性。
28、本申请实施例的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请实施例而了解。本申请实施例的目的和其他优点在说明书以及附图所特别指出的结构来实现和获得。
技术特征:
1.一种射击机构,其特征在于,包括射击装置和调节装置,其中:
2.根据权利要求1所述的射击机构,其特征在于,所述射击装置还包括储弹机构和发射机构,其中:
3.根据权利要求1所述的射击机构,其特征在于,所述射击机构还包括底座和云台装置,所述云台装置的下部分和上部分别连接所述底座和所述射击装置,其中:
4.根据权利要求3所述的射击机构,其特征在于,所述底座采用铝材搭建,包括第一铝型材、第二铝型材、第三铝型材和钣金连接件,其中:
5.根据权利要求4所述的射击机构,其特征在于,所述云台装置包括水平云台和俯仰云台,其中:
6.根据权利要求1-5任一项所述的射击机构,其特征在于,所述射击装置还包括摩擦轮电机,所述调节装置包括两个,每一所述调节装置均包括调节电机、丝杆、直线导轨和外壳,其中:
7.根据权利要求1-5任一项所述的射击机构,其特征在于,所述射击装置还包括摩擦轮电机,所述调节装置包括两个,每一所述调节装置均包括直线电机,一个所述直线电机与所述摩擦轮的一个连接,另一个所述直线电机与所述摩擦轮的另一个连接。
8.根据权利要求5所述的射击机构,其特征在于,所述射击机构还包括控制系统,所述控制系统包括蓝牙模块、驱动模块、控制模块和供电模块,其中,
9.一种射击机器人,其特征在于,所述射击机器人包括可移动装置及如权利要求1-8任一项所述的射击机构。
10.一种射击方法,其特征在于,所述射击方法应用于如上述权利要求1-8任一项所述的射击机构或者权利要求9所述的射击机器人,其中,所述方法包括:
技术总结
本发明涉及射击的技术领域,具体提供一种射击机构、射击机器人及射击方法;其中,射击机构包括射击装置和调节装置,其中:射击装置包括间隔设置的摩擦轮,调节装置与射击装置的至少一个摩擦轮连接,通过调节装置,摩擦轮之间的间距被配置为可调节。在实际应用场景中,现有的射击机构沿相应运动轴如沿yaw轴和pitch轴移动时会产生较大的振动,进而影响射击机构发射弹丸的命中率和精确度,而在本发明提供的上述实施例中,通过对射击装置配置有能够调节间隔设置的摩擦轮距的调节装置,以使得在实际应用场景中,当由于发生运动振动而影响摩擦轮的间距时,可以通过观察弹丸落点,以通过调节装置及时调节摩擦轮间距,从而确保发射精度的准确性。
技术研发人员:郭喆,毕国玲,张以撒,冯阳
受保护的技术使用者:中国科学院长春光学精密机械与物理研究所
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!