一种新型履带自走式大蒜联合收获机的制作方法
[0001]
本发明涉及农用机械领域,确切地说是一种新型履带自走式大蒜联合收获机。
背景技术:
[0002]
中国是全球最大的大蒜种植国,种植面积占世界种植面积的90%,占世界总出口量的80%。 全国每年种植大蒜总产量大概在800-1300万吨,其中形成商品大蒜的产量在300—500万吨,其余大蒜供给本地农村市场。中国大蒜种植主产区为山东、河南、江苏、河北、云南、陕西,其中山东、河南、江苏尤为突出。山东种植面积居首,具有行业主导地位,主产区大蒜主要用于出口和加工。大蒜是劳动密集型栽培作物,收获作业是其生产过程的重要环节,存在人工作业劳动强度大、占用农时多、收获季节性强、收获损失大、效率低等问题,已成为影响大蒜产发展、产业成长的主要瓶颈。大蒜作为一种经济作物在我国的国际贸易中起着重要的作用,因此,利用机械收获大蒜是一种趋势。现如今由于种植模式、大蒜收获机械的缺乏等原因,大蒜收获仍然主要靠劳动力,山东地区大蒜机收率不足5%。发达国家或者地区对大蒜机械化生产技术与装备的研发,起步早、投入大、发展快,早已实现专业化、成套化和系列化。收货方面,欧美等国早在20世纪60年代末就实现了大蒜收获机械化,收获机械以联合收获机居多,联合收获机有以牵引式为主,以轮式拖拉机底盘居多,以液压驱动为主。我国是世界大蒜第一生产大国,但对大蒜生产机械化关键技术与装备的研究起步晚,技术水平不成熟、可靠性差、效率低。目前,收获作业主要依靠人共完成,费工、费时、费力。
技术实现要素:
[0003]
本发明要解决的技术问题是现有技术收获作业主要依靠人共完成,费工、费时、费力,国产大蒜生产机械化关键技术与装备的研究起步晚,技术水平不成熟、可靠性差、效率低,设备农业操作过程中,收蒜效率低下,损坏率高。
[0004]
为解决上述技术问题,本发明采用如下技术手段:一种新型履带自走式大蒜联合收获机,包括大蒜联合收获机本体;所述的大蒜联合收获机本体设有前剪秧装置、震动收蒜装置、辅送跁连、传送结构和收蒜装置,所述的震动收蒜装置为收蒜铲,所述的辅送跁连设置在收蒜铲的后侧,辅送跁连倾斜设置,辅送跁连两端设有传动滚轮,传动滚轮上设有传动带,两条传动带之间设有跁连杆,辅送跁连下方设有铲后限轮和拖地链轮,所述的铲后限轮设有轮体,轮体两侧设有轴体,轴体一端连接轮体,轴体另一端连接支撑板。
[0005]
作为优选,本发明更进一步的技术方案是:所述的大蒜联合收获机本体有控制系统,所述的控制系统包括操作杆,操作盘、控制按键,控制系统上方设有控制台座椅,控制台座椅上方设有遮阳挡板。
[0006]
所述的传送结构包括横式输送带和立式输送梯,横式输送带设置在辅送跁连一侧的下方,立式输送梯底部设置在横式输送带一侧,立式输送梯的顶部设置在收蒜斗口的上方。
[0007]
所述的收蒜装置为收蒜斗。
[0008]
所述的震动收蒜装置为震动收蒜铲,震动收蒜铲设置有震动偏心轴、铲叶片和震动电机。
[0009]
所述的前剪秧装置为前剪秧条幅器,前剪秧条幅器设有前剪秧剪、送秧传送带。
[0010]
所述的前剪秧条幅器和震动收蒜铲之间设有伸缩结构,所述的伸缩结构为深浅可调轴。
[0011]
本发明一种新型履带自走式大蒜联合收获机,履带自走式大蒜联合收获机,作业幅宽1.2米,动力30马力,前剪秧摊晒,后震动铲收获,入土8-12公分可调,作业灵便,效果可观,伤蒜率千分之三,易操作,是全国唯一的实用型收获机械,每小时3-5亩,减省人工工时,收获后可自卸到田间以外的场地,为夏季作物播种争取时间。
附图说明
[0012]
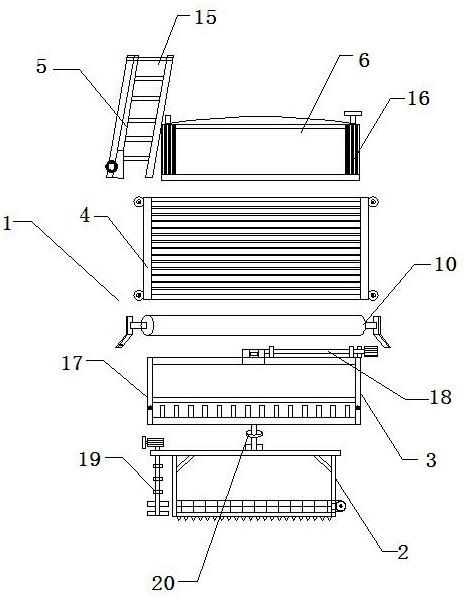
图1为本发明的大蒜联合收获机本体的结构示意图。
[0013]
图2为本发明的辅送跁连的结构示意图。
[0014]
图3为本发明的铲后限轮的结构示意图。
[0015]
图4为本发明的传送结构的结构示意图。
[0016]
附图标记说明:1-大蒜联合收获机本体;2-前剪秧装置;3-震动收蒜装置;4-辅送跁连;5-传送结构;6-收蒜装置;7-传动滚轮;8-传动带;9-跁连杆;10-铲后限轮;11-轮体;12-轴体;13-支撑板;14-横式输送带;15-立式输送梯;16-收蒜斗;17-震动收蒜铲;18-震动偏心轴;19-剪秧条幅器;20-深浅可调轴。
具体实施方式
[0017]
下面结合实施例,进一步说明本发明。
[0018]
具体实施例1:参见图1、图2、图3、图4可知,本发明一种新型履带自走式大蒜联合收获机,包括大蒜联合收获机本体1;所述的大蒜联合收获机本体1设有前剪秧装置2、震动收蒜装置3、辅送跁连4、传送结构5和收蒜装置6,所述的震动收蒜装置3为收蒜铲,所述的辅送跁连4设置在收蒜铲的后侧,辅送跁连4倾斜设置,辅送跁连4两端设有传动滚轮7,传动滚轮7上设有传动带8,两条传动带8之间设有跁连杆9,辅送跁连4下方设有铲后限轮10和拖地链轮,所述的铲后限轮10设有轮体11,轮体11两侧设有轴体12,轴体12一端连接轮体11,轴体12另一端连接支撑板13,大蒜联合收获机本体1有控制系统,所述的控制系统包括操作杆,操作盘、控制按键,控制系统上方设有控制台座椅,控制台座椅上方设有遮阳挡板,传送结构5包括横式输送带14和立式输送梯15,横式输送带14设置在辅送跁连4一侧的下方,立式输送梯15底部设置在横式输送带14一侧,立式输送梯15的顶部设置在收蒜斗16口的上方,收蒜装置6为收蒜斗16,震动收蒜装置3为震动收蒜铲17,震动收蒜铲17设置有震动偏心轴18、铲叶片和震动电机,前剪秧装置2为前剪秧条幅器19,前剪秧条幅器19设有前剪秧剪、送秧传送带,前剪秧条幅器19和震动收蒜铲17之间设有伸缩结构,所述的伸缩结构为深浅可调轴20。
[0019]
具体实施例2参见图1,本发明一种新型履带自走式大蒜联合收获机,前剪秧装置包括支架、前剪秧
剪、送秧传送带、前剪秧条辅器、减速电机。
[0020]
由于以上所述仅为本发明的具体实施方式,但本发明的保护不限于此,任何本技术领域的技术人员所能想到本技术方案技术特征的等同的变化或替代,都涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1