一种全自动播种农用机器人的制作方法
[0001]
本发明涉及播种技术领域,尤其涉及一种全自动播种农用机器人。
背景技术:
[0002]
播种机主要用于谷物、蔬菜、牧草等小粒种子的播种作业,常用的有谷物条播机。作业时,由行走轮带动排种轮旋转,种子自种子箱内的种子被按要求的播种量排入输种管,并经开沟器落入开好的沟槽内,然后由覆土镇压装置将种子覆盖压实。出苗后作物成平行等距的条行。用于不同作物的条播机除采用不同类型的排种器和开沟器外,其结构基本相同,一般由机架、牵引或悬挂装置、种子箱、排种器、传动装置、输种管、开沟器、划行器、行走轮和覆土镇压装置等组成。其中影响播种质量的主要是排种装置和开沟器。常用的排种器有槽轮式、离心式、磨盘式等类型。开沟器有锄铲式、靴式、滑刀式、单圆盘式和双圆盘式等类型。
[0003]
现在一般使用联合作业机和免耕播种机:如在谷物条播机上加设肥箱、排肥器和输肥管,即可在播种的同时施肥。与土壤耕作、喷撒杀虫剂和除莠剂、铺塑料薄膜(见地膜覆盖机械)等项作业联合组成的联合作业机,有的能一次完成土壤播前耕作、施种肥、土壤消毒、开排水沟、播种、施杀虫剂和除莠剂等项作业。免耕播种机是在前茬作物收获后的茬地上直接开出种沟播种,也称直接播种机或硬茬播种机,可防止土壤流失,节约能源,降低作业成本,多用于谷物、牧草和青饲玉米等作物的播种作业
[0004]
目前在进行播种种植时,无论是大田种植还是设施农业种植仍以手工和简单的劳动工具为主,费工费力,效率低,浪费种子,蔬菜种植户十分辛苦,现有播种设备需要人工驾驶操作,工时费用贵,且因为机器较大在撒种过程中容易把种子撒在畦外面,影响出苗率,造成种子浪费。
技术实现要素:
[0005]
本发明的目的在于提供一种全自动播种农用机器人,以解决上述背景技术中提出的目前在播种种植种植时,无论是大田种植还是设施农业种植仍以手工和简单的劳动工具为主,费工费力,效率低,浪费种子,蔬菜种植户十分辛苦,现有播种设备需要人工驾驶操作,工时费用贵,且因为机器较大在撒种过程中容易把种子撒在畦外面,影响出苗率,造成种子浪费的情况。
[0006]
为了实现上述目的,本发明采用了如下技术方案:
[0007]
一种全自动播种农用机器人,包括机体,在机体上铰接两个箱门,两个箱门对称设置,在每个箱门上均固定有相应的把手,在机体一侧固定连接有第一安装板,在第一安装板上安装有两个对称设置的第一安装箱,在第一安装箱内设有第一液压缸,第一液压缸的活塞杆竖直向下设置且穿过相应的第一安装箱并延伸至其下方,在第一液压缸的活塞杆上固定有犁刀,在机体下侧安装有一组驱动轮,在每个驱动轮上设有一组第一安装孔,在机体下方设有两个相对设置的播种装置,每个播种装置均与相应的第一安装箱对应设置,在机体
的另一侧安装有两个第二安装箱与第三安装箱,第三安装箱设置在两个第二安装箱之间。
[0008]
进一步的,在所述每个第一安装箱上均安装有夜灯,在每个第一安装箱与第一安装板之间均设有一组三角加强板,在机体固定有第一安装板的一端固定有第二安装板,第二安装板设置在第一安装板上方,在第二安装板上安装头一组线形阵列的摄像头。
[0009]
进一步的,所述犁刀包括分地板,在分地板上方设有第二安装孔,第二安装孔用于方便安装,分地板呈三棱柱形,在分地板的一侧设有第一安装槽,在第一安装槽内部设有震动电机,在设有第一安装槽的一侧设有第二安装槽,在第二安装槽内设有犁地刀,犁地刀与第二安装槽滑动配合,在第二安装槽处设有挡板,犁地刀设置在挡板与第二安装槽之间,再分地板设有第一安装槽的一侧设有一组加强筋板。
[0010]
进一步的,所述第二安装箱内设有第二液压缸,第二液压缸固定连接在第二安装箱顶部,第二液压缸驱动连接有第一电机,在第一电机的下方驱动连接有清土装置。
[0011]
进一步的,所述清土装置包括安装盘,在安装盘上固定有一组第三安装板,第三安装板以安装盘的轴线为圆心圆周阵列设置,第三安装板倾斜度角设置,在每个第三安装板上均设有第三安装槽,在每个第三安装槽内均安装有橡胶安装条,在每个安装条上均设有一组直线阵列设置的清扫条,清扫条为橡胶制成,第三安装板的一端均设有用于固定安装条的固定板。
[0012]
进一步的,所述第三安装箱内固定有第三液压缸,第三液压缸固定连接诶在第三安装箱的内侧顶部,第三液压缸的活塞杆竖直向下设置且穿过第三安装箱并延伸至其下方,在活塞杆上固定有补土板,补土板为l形板。
[0013]
进一步的,所述播种装置包括箱体,在箱体上侧设有窗口,在窗口处配合连接有窗门,在箱体下侧设有播种槽,播种槽为圆形且设置在箱体底部的中心处,在箱体内设有第四安装箱,第四安装箱通过第一固定框架固定连接在箱体上,在第四安装箱与播种槽之间设有第二框架,第二框架设置在第四安装箱内部,在第四安装箱内设有第四液压缸,第四液压缸使用第二框架进行固定,第四液压缸的活塞杆竖直向下设置且穿过箱体延伸至播种槽内部,第四液压缸的活塞杆上固定有钻机,钻机驱动连接有钻头,钻头设置在播种槽的中心处。
[0014]
进一步的,所述第四安装箱与箱体之间形成种子腔,在箱体上设有两个相对设置的播种孔,播种孔的一端设置在种子腔内,播种孔的另一端设置在播种槽内,在播种槽内设有两个种子阀,每个种子阀均与相应的播种孔对应设置。
[0015]
进一步的,所述种子腔内设有第一筛选板与第二筛选板,第一筛选板与第二筛选板均为环形,第一筛选板与第二筛选板均呈倾斜设置,在箱体上设有一组第一筛选孔与一组第二筛选孔,第一筛选板与第一筛选孔对应设置,第二筛选板与第二筛选孔对应设置,在窗门的下侧固定有定位板,定位板与第四安装箱配合连接,在定位板与钻机之间设有行程开关。
[0016]
一种全自动播种农用机器人,该播种机的使用方法如下:
[0017]
步骤1:在进行使用前,首先对各个部件进行检查,在检查无误后,便可以进行使用,在使用时,首先通过第一安装箱内的液压缸控制犁刀下移,致使犁刀插在土地内,再使用驱动轮驱动机体移动,播种装置运行,通过钻机与钻头之间的相互配合,完成在土地上钻孔并播种的操作;
[0018]
步骤2:在播种完成后,通过第三安装箱控制补土板下移,使用犁刀犁开的土对播种完成后的坑道进行一侧土的覆盖,再使用清土装置完成坑道另一侧土的覆盖。
[0019]
本发明至少具备以下有益效果:
[0020]
该播种机器人通过犁刀完成犁地操作,在犁地时,首先通过犁地刀插入土壤后,再使用分地板将土壤抛到犁刀的两侧,在犁刀碰到土地中的石子时,能够通过设置在第一安装槽内的震动电机将石子震开,防止石子对犁地刀造成损伤,增加了犁刀的使用寿命,在犁地刀损坏时,通过卸载挡板,可以方便对犁地刀进行更换;
[0021]
该播种机器人通过播种装置完成播种操作,播种装置内的第一筛选板与第二筛选板能够对放在种子腔内的种子进行筛选,防止石子将播种孔卡住,在播种装置运行时,通过第四液压缸控制钻机下移,使得钻头在土地上钻出播种孔,再控制相应的种子阀,使种子腔内的种子通过播种槽落在钻头钻出的播种坑内,完成在土地上钻孔并播种的操作,钻头与播种孔均设置在播种槽内,使得播种孔落下的种子会落在钻头钻出的播种槽内,有效防止种子落在播种用孔外;
[0022]
该通过清土装置与安装在第三安装箱上的补土板完成对犁刀犁出的播种沟的土壤填充操作,在播种完成后,通过控制补土板下移,完成对播种坑一侧土的覆盖,再控制清土装置运行,使用第二安装箱内的电机驱动倾斜设置的第三安装板转动,第三安装板上的清扫条会将播种坑的另一侧进行土的覆盖,使用清土装置能够通过清扫条将土壤扫飞,对土块进行打散操作并使土壤均匀铺在种子上,进一步增加了种子的发芽概率。
附图说明
[0023]
为了更清楚地说明本发明实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0024]
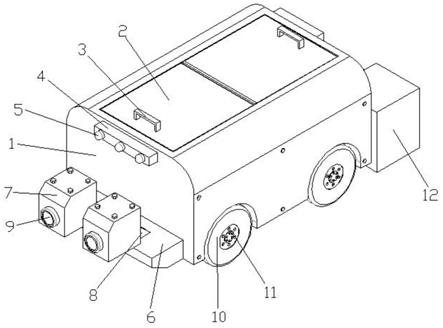
图1为本发明的整体结构示意图;
[0025]
图2为本发明的俯视图;
[0026]
图3为本发明的主视图;
[0027]
图4为犁刀的基本结构示意图;
[0028]
图5为犁刀的主视图;
[0029]
图6为第二安装箱的内部示意图;
[0030]
图7为清土装置的基本结构示意图;
[0031]
图8为播种装置的基本结构示意图。
[0032]
图中:1、机体;11、第一安装孔;12、第二安装箱;121、清土装置;122、安装盘;123、第三安装板;124、第三安装槽;125、安装条;126、清扫条;127、固定板;13、第三安装箱;131、第三液压缸;14、播种装置;141、箱体;142、窗口;143、窗门;144、第四安装箱;145、定位板;146、第四液压缸;147、第一固定框架; 148、行程开关;149、第二框架;1411、钻机;1412、钻头;1413、种子腔;1414、播种槽;1415、播种孔;1416、种子阀;1419、第一筛选孔;1420、第二筛选孔;1421、第一筛选板;1422、第二筛选板; 15、第二液压缸;16、第一电机;2、箱门;3、把手;4、第二安装板;5、摄像头;6、第一安装板;7、第一安装箱;71、犁刀;711、分地板;712、第二安装孔;714、犁地刀;715、加强筋板;716、第一安装槽;717、震动电机;718、第二安装槽;
719、挡板;8、三角加强板;9、夜灯;10、驱动轮。
具体实施方式
[0033]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0034]
实施例1
[0035]
参照图1、图2、图3、图4、图7与图8所示,一种全自动播种农用机器人,包括机体1,在机体1上铰接两个箱门2,两个箱门2 对称设置,在每个箱门2上均固定有相应的把手3,在机体1一侧固定连接有第一安装板6,在第一安装板6上安装有两个对称设置的第一安装箱7,在第一安装箱7内设有第一液压缸,第一液压缸的活塞杆竖直向下设置且穿过相应的第一安装箱7并延伸至其下方,在第一液压缸的活塞杆上固定有犁刀71,在机体1下侧安装有一组驱动轮10,在每个驱动轮10上设有一组第一安装孔11,在机体1下方设有两个相对设置的播种装置14,。
[0036]
每个第一安装箱7上均安装有夜灯9,在每个第一安装箱7与第一安装板6之间均设有一组三角加强板8,在机体1固定有第一安装板6的一端固定有第二安装板4,第二安装板4设置在第一安装板6 上方,在第二安装板4上安装头一组线形阵列的摄像头5。
[0037]
犁刀71包括分地板711,在分地板711上方设有第二安装孔712,第二安装孔712用于方便安装,分地板711呈三棱柱形,在分地板 711的一侧设有第一安装槽716,在第一安装槽716内部设有震动电机717,在设有第一安装槽716的一侧设有第二安装槽718,在第二安装槽718内设有犁地刀714,犁地刀714与第二安装槽718滑动配合,在第二安装槽718处设有挡板719,犁地刀714设置在挡板719 与第二安装槽718之间,再分地板711设有第一安装槽716的一侧设有一组加强筋板715,播种装置14包括种子箱,在种子箱下侧设有放料口。
[0038]
本实施例中通过犁刀71首先进行犁地操作,在犁地时,首先通过犁地刀714插入土壤后,再使用分地板711将土壤抛到犁刀71的两侧,在犁刀71碰到土地中的石子时,通过设置在第一安装槽716 内的震动电机717将石子震开,在犁刀71碰到土地中的根茎时,使用犁地刀714将根茎切开,在犁地刀714损坏时,通过卸载挡板719, 便可以对犁地刀714进行更换。
[0039]
实施例2
[0040]
参照图4-8所示,一种全自动播种农用机器人,包括机体1,在机体1上铰接两个箱门2,两个箱门2对称设置,在每个箱门2上均固定有相应的把手3,在机体1一侧固定连接有第一安装板6,在第一安装板6上安装有两个对称设置的第一安装箱7,在第一安装箱7 内设有第一液压缸,第一液压缸的活塞杆竖直向下设置且穿过相应的第一安装箱7并延伸至其下方,在第一液压缸的活塞杆上固定有犁刀 71,犁刀71使用工字型犁刀,在机体1下侧安装有一组驱动轮10,在每个驱动轮10上设有一组第一安装孔11,在机体1下方设有两个相对设置的播种装置14,每个播种装置14均与相应的第一安装箱7 对应设置。
[0041]
每个第一安装箱7上均安装有夜灯9,在每个第一安装箱7与第一安装板6之间均设有一组三角加强板8,在机体1固定有第一安装板6的一端固定有第二安装板4,第二安装板4设置在第一安装板6 上方,在第二安装板4上安装头一组线形阵列的摄像头5。
[0042]
播种装置14包括箱体141,在箱体141上侧设有窗口142,在窗口142处配合连接有窗门143,在箱体141下侧设有播种槽1414,播种槽1414为圆形且设置在箱体141底部的中心处,在箱体141内设有第四安装箱144,第四安装箱144通过第一固定框架147固定连接在箱体141上,在第四安装箱144与播种槽1414之间设有第二框架 149,第二框架149设置在第四安装箱144内部,在第四安装箱144 内设有第四液压缸146,第四液压缸146使用第二框架149进行固定,第四液压缸146的活塞杆竖直向下设置且穿过箱体141延伸至播种槽1414内部,第四液压缸146的活塞杆上固定有钻机1411,钻机1411 驱动连接有钻头1412,钻头1412设置在播种槽1414的中心处。
[0043]
第四安装箱144与箱体141之间形成种子腔1413,在箱体141 上设有两个相对设置的播种孔1415,播种孔1415的一端设置在种子腔1413内,播种孔1415的另一端设置在播种槽1414内,在播种槽 1414内设有两个种子阀1416,每个种子阀1416均与相应的播种孔 1415对应设置。
[0044]
种子腔1413内设有第一筛选板1421与第二筛选板1422,第一筛选板1421与第二筛选板1422均为环形,第一筛选板1421与第二筛选板1422均呈倾斜设置,在箱体141上设有一组第一筛选孔1419 与一组第二筛选孔1420,第一筛选板1421与第一筛选孔1419对应设置,第二筛选板1422与第二筛选孔1420对应设置,在窗门143的下侧固定有定位板145,定位板145与第四安装箱144配合连接,在定位板145与钻机1411之间设有行程开关148。
[0045]
本实施例通过播种装置14完成播种操作,这时播种装置14运行前,首先向着种子腔1413内放入种子,在放入种子时,第一筛选孔 1419与第二筛选孔1420使用塞子堵住,在第一筛选板1421与第二筛选板1422完成筛选工作后,取下塞子通过第一筛选孔1419与第二筛选孔1420将杂质取出,在播种装置14运行时,通过第四液压缸 146控制钻机1411下移,使得钻头1412在土地上钻出播种用孔,再控制相应的种子阀1416,使种子腔1413内的种子通过播种槽1414 落在钻头1412钻出的播种用孔内,完成在土地上钻孔并播种的操作,钻头1412与播种孔1415均设置在播种槽1414内,使得播种孔1415 落下的种子会落在钻头1412钻出的播种用孔内。
[0046]
实施例3
[0047]
参照图1-6所示,一种全自动播种农用机器人,包括机体1,在机体1上铰接两个箱门2,两个箱门2对称设置,在每个箱门2上均固定有相应的把手3,在机体1一侧固定连接有第一安装板6,在第一安装板6上安装有两个对称设置的第一安装箱7,在第一安装箱7 内设有第一液压缸,第一液压缸的活塞杆竖直向下设置且穿过相应的第一安装箱7并延伸至其下方,在第一液压缸的活塞杆上固定有犁刀 71,在机体1下侧安装有一组驱动轮10,在每个驱动轮10上设有一组第一安装孔11,在机体1内设有种子箱了,种子箱上设有控制播种的阀门,在机体1的另一侧安装有两个第二安装箱12与第三安装箱13,第三安装箱13设置在两个第二安装箱12之间。
[0048]
每个第一安装箱7上均安装有夜灯9,在每个第一安装箱7与第一安装板6之间均设有一组三角加强板8,在机体1固定有第一安装板6的一端固定有第二安装板4,第二安装板4设置在第一安装板6 上方,在第二安装板4上安装头一组线形阵列的摄像头5。
[0049]
犁刀71包括分地板711,在分地板711上方设有第二安装孔712,第二安装孔712用于方便安装,分地板711呈三棱柱形,在分地板 711的一侧设有第一安装槽716,在第一安装
槽716内部设有震动电机717,在设有第一安装槽716的一侧设有第二安装槽718,在第二安装槽718内设有犁地刀714,犁地刀714与第二安装槽718滑动配合,在第二安装槽718处设有挡板719,犁地刀714设置在挡板719 与第二安装槽718之间,再分地板711设有第一安装槽716的一侧设有一组加强筋板715。
[0050]
在第二安装箱12内设有第二液压缸15,第二液压缸15固定连接在第二安装箱12顶部,第二液压缸15驱动连接有第一电机16,在第一电机16的下方驱动连接有清土装置121。
[0051]
清土装置121包括安装盘122,在安装盘122上固定有一组第三安装板123,第三安装板123以安装盘122的轴线为圆心圆周阵列设置,第三安装板123倾斜45度角设置,在每个第三安装板123上均设有第三安装槽124,在每个第三安装槽124内均安装有橡胶安装条 125,在每个安装条125上均设有一组直线阵列设置的清扫条126,清扫条126为橡胶制成,第三安装板123的一端均设有用于固定安装条125的固定板127。
[0052]
第三安装箱13内固定有第三液压缸131,第三液压缸131固定连接诶在第三安装箱13的内侧顶部,第三液压缸131的活塞杆竖直向下设置且穿过第三安装箱13并延伸至其下方,在活塞杆上固定有补土板,补土板为l形板。
[0053]
本实施例中通过清土装置121与安装在第三安装箱13上的补土板,完成了对犁刀71犁出的播种沟的土壤填充操作,在播种完成后,通过第三安装箱13控制补土板下移,使用犁刀71犁开的土对播种完成后的坑道进行一侧土的覆盖,再控制清土装置121运行,使用第二安装箱12内的电机驱动倾斜设置的第三安装板123转动,第三安装板123上的清扫条126会将犁刀71犁开的土壤扫回对播种坑进行覆盖,使用清土装置121能够通过清扫条126将土壤扫飞,对土块进行打散操作并使土壤均匀铺在种子上。
[0054]
实施例4
[0055]
参照图1-8所示,一种全自动播种农用机器人,包括机体1,在机体1上铰接两个箱门2,两个箱门2对称设置,在每个箱门2上均固定有相应的把手3,在机体1一侧固定连接有第一安装板6,在第一安装板6上安装有两个对称设置的第一安装箱7,在第一安装箱7 内设有第一液压缸,第一液压缸的活塞杆竖直向下设置且穿过相应的第一安装箱7并延伸至其下方,在第一液压缸的活塞杆上固定有犁刀 71,在机体1下侧安装有一组驱动轮10,在每个驱动轮10上设有一组第一安装孔11,在机体1下方设有两个相对设置的播种装置14,每个播种装置14均与相应的第一安装箱7对应设置,在机体1的另一侧安装有两个第二安装箱12与第三安装箱13,第三安装箱13设置在两个第二安装箱12之间。
[0056]
每个第一安装箱7上均安装有夜灯9,在每个第一安装箱7与第一安装板6之间均设有一组三角加强板8,在机体1固定有第一安装板6的一端固定有第二安装板4,第二安装板4设置在第一安装板6 上方,在第二安装板4上安装头一组线形阵列的摄像头5。
[0057]
犁刀71包括分地板711,在分地板711上方设有第二安装孔712,第二安装孔712用于方便安装,分地板711呈三棱柱形,在分地板 711的一侧设有第一安装槽716,在第一安装槽716内部设有震动电机717,在设有第一安装槽716的一侧设有第二安装槽718,在第二安装槽718内设有犁地刀714,犁地刀714与第二安装槽718滑动配合,在第二安装槽718处设有挡板719,犁地刀714设置在挡板719 与第二安装槽718之间,再分地板711设有第一安装槽716的一侧设有一组加强筋板715。
[0058]
在第二安装箱12内设有第二液压缸15,第二液压缸15固定连接在第二安装箱12顶
部,第二液压缸15驱动连接有第一电机16,在第一电机16的下方驱动连接有清土装置121。
[0059]
清土装置121包括安装盘122,在安装盘122上固定有一组第三安装板123,第三安装板123以安装盘122的轴线为圆心圆周阵列设置,第三安装板123倾斜45度角设置,在每个第三安装板123上均设有第三安装槽124,在每个第三安装槽124内均安装有橡胶安装条 125,在每个安装条125上均设有一组直线阵列设置的清扫条126,清扫条126为橡胶制成,第三安装板123的一端均设有用于固定安装条125的固定板127。
[0060]
第三安装箱13内固定有第三液压缸131,第三液压缸131固定连接诶在第三安装箱13的内侧顶部,第三液压缸131的活塞杆竖直向下设置且穿过第三安装箱13并延伸至其下方,在活塞杆上固定有补土板,补土板为l形板。
[0061]
播种装置14包括箱体141,在箱体141上侧设有窗口142,在窗口142处配合连接有窗门143,在箱体141下侧设有播种槽1414,播种槽1414为圆形且设置在箱体141底部的中心处,在箱体141内设有第四安装箱144,第四安装箱144通过第一固定框架147固定连接在箱体141上,在第四安装箱144与播种槽1414之间设有第二框架 149,第二框架149设置在第四安装箱144内部,在第四安装箱144 内设有第四液压缸146,第四液压缸146使用第二框架149进行固定,第四液压缸146的活塞杆竖直向下设置且穿过箱体141延伸至播种槽 1414内部,第四液压缸146的活塞杆上固定有钻机1411,钻机1411 驱动连接有钻头1412,钻头1412设置在播种槽1414的中心处。
[0062]
第四安装箱144与箱体141之间形成种子腔1413,在箱体141 上设有两个相对设置的播种孔1415,播种孔1415的一端设置在种子腔1413内,播种孔1415的另一端设置在播种槽1414内,在播种槽 1414内设有两个种子阀1416,每个种子阀1416均与相应的播种孔 1415对应设置。
[0063]
种子腔1413内设有第一筛选板1421与第二筛选板1422,第一筛选板1421与第二筛选板1422均为环形,第一筛选板1421与第二筛选板1422均呈倾斜设置,在箱体141上设有一组第一筛选孔1419 与一组第二筛选孔1420,第一筛选板1421与第一筛选孔1419对应设置,第二筛选板1422与第二筛选孔1420对应设置,在窗门143的下侧固定有定位板145,定位板145与第四安装箱144配合连接,在定位板145与钻机1411之间设有行程开关148。
[0064]
本实施例通过犁刀71完成挖出播种沟的操作,接着使用播种装置14完成打播种孔并在播种孔内播种这两步操作,最后使用补土板与清土装置121完成覆土操作,使用土壤完成对种子的掩埋操作。
[0065]
本发明的使用原理,在进行使用前,首先对各个部件进行检查,在检查无误后,便可以进行使用,在使用时,首先通过第一安装箱7 内的液压缸控制犁刀71下移,致使犁刀71插在土地内,再使用驱动轮10驱动机体1移动,在机体1移动时,犁刀71会在地上犁开土地成播种坑,在机体1运动时,震动电机717震动,有效的防止是由于石头对犁刀71犁地的影响,在犁地刀714损坏时,通过卸下挡板719, 便可对犁地刀714进行更换,这时播种装置14运行前,首先向着种子腔1413内放入种子,在放入种子时,第一筛选孔1419与第二筛选孔1420使用塞子堵住,在第一筛选板1421与第二筛选板1422完成筛选工作后,取下塞子通过第一筛选孔1419与第二筛选孔1420将杂质取出,在播种装置14运行时,通过第四液压缸146控制钻机1411 下移,使得钻头1412在土地上钻出播种孔,再控制相应的种子阀 1416,使种子腔1413内的种子通过播种槽1414落在钻头1412钻出的播种坑内,完成在土地上钻孔并播种的
操作,在播种完成后,通过第三安装箱13控制补土板下移,使用犁刀71犁开的土对播种完成后的坑道进行一侧土的覆盖,再使用清土装置121完成坑道另一侧土的覆盖,在清土装置121运行时,使用第二安装箱12内的电机驱动倾斜设置的第三安装板123转动,第三安装板123上的清扫条126会将犁刀71犁开的土壤扫回对播种坑进行覆盖,进而完成犁地松土、钻播种孔、洒种、覆土的全自动播种操作。
[0066]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保险的本发明的范围内。本发明要求的保险范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1