一种全方位动物驱赶装置的制作方法
1.本发明涉及动物驱赶领域,尤其涉及一种全方位动物驱赶装置。
背景技术:
2.人们在生产、生活当中,有许多场所备受鼠、蛇、飞鸟、蟑螂、蚊虫、野猪、狮子、老虎、猫、狗等动物的困扰,有些会对农作物进行破坏、扰乱人们的休息、甚至危害人类安全,因此,需要对这些动物进行驱赶;如:1、在一楼花园院子里、室内等可能出现的蛇、鼠、蚊虫、甚至狮子老虎等凶猛动物,对人们日常生活造成的困扰和伤害;2、在农业庄稼地里为了确保粮食不被鼠、鸟、野猪、兔子等吃、踩踏掉,人们通常在田地当中摆放“稻草人”等形式进行驱赶,但是效果并不太好,动物们经过短时间就能识别“稻草人”等对其并无威胁;后来人们改进了驱赶方式,通过探测器检测到动物后,采用了喷洒花露水、风油精、药物等来驱赶蚊虫等针对性驱赶相应动物的手段;但是存在很多缺陷,喷洒的药物污染农田土质及作物花木本身以及不同的动物需要不同药物配合使用,使用繁琐、效果不理想、易产生毒害;于是有人根据动物所能听到的声音频率设计出通过超声波刺激并能够导致鼠、蛇、飞鸟、蟑螂、蚊虫、野猪、猫、狗等感到威胁及不安达到驱赶的目的;但由于超声波发射只能朝一个方向,单独一个超声波驱赶装置无法全角度实施驱赶;如要覆盖全角度则需要多个超声波驱赶装置,成本数倍增加;同时市场上现有的驱赶装置无法实现地上动物、地下动物(如鼠、蛇等)、全维度实施驱赶;以及用于室外的驱赶装置的支撑杆插入土壤,在风吹的风力下或雨雪天土质稍变松软后容易倒掉,影响超声波的覆盖范围,驱赶效果急剧下降。3.户外建筑物特别是历史文物、户外重要设备也经常受到鸟粪及鸟窝等的伤害,本发明也可以独立安装在户外建筑物及重要设备上对鸟类及攀爬类动物进行驱赶,达到保护户外建筑物及重要设备的效果。
技术实现要素:
3.本发明的目的在于解决现有技术的不足,提供了一种可360度全角度实时监测、并能准确捕捉入侵动物方向、室外易安装且不易倾倒、省时、省电、高效,地上、地下多维度、多种方式定向实时驱赶动物的装置。
4.为实现上述目的,本发明采用了如下技术方案:
5.一种全方位动物驱赶装置,包括下壳体、固定支架、支撑杆和可旋转的上壳体;所述上壳体的顶部设有上盖,所述上盖的一侧设有led灯组;所述上壳体与led灯组相同方向的侧壁上装有声波喇叭;所述上壳体的下端面的四个角分别装有一颗磁铁,所述上壳体的下端面中部设有连接孔以及与连接孔同圆心设置的齿轮槽;所述下壳体内装有主控器、给主控器供电的可充电电池、以及电连接所述主控器的转向电机,所述转向电机通过减速齿轮组啮合所述齿轮槽;所述下壳体的顶端一角装有电连接与所述主控器的霍尔元件,所述下壳体的顶端中部设有圆柱形凸轴,凸轴套接于所述连接孔,所述下壳体的四个方向的侧壁中间位置分别装有电连接所述主控器的释热红外线传感器;所述固定支架安装于所述下
壳体的底部;所述支撑杆连接于所述固定支架,所述支撑杆内装有声波振动发生器;led灯组、声波喇叭和声波震动发生器电连接所述主控器。
6.作为优选,所述主控器包括微控制单元,与微控制单元相连接的led灯驱动模块、超声波模块、声波震动发生器模块、电源管理模块、无线接收模块、存储模块。
7.作为优选,还包括配合无线接收模块的无线遥控器、安装于上盖的太阳能电池板,所述太阳能电池板的输出端连接所述可充电电池,所述可充电电池和太阳能电池板连接所述电源管理模块。
8.作为优选,所述微控制单元控制转向电机带动上壳体旋转实现led灯组、声波喇叭和磁铁的转动,所述霍尔元件与四颗磁铁配合形成角度传感器并配合微控制单元和释热红外线传感器控制上壳体的旋转以实现声波喇叭和led灯组旋转角度的确定。
9.作为优选,所述下壳体的底部装有底板,所述底板上装有主控器、转向电机和电池仓,所述可充电电池装于所述电池仓;所述底板的中部装有电池仓盖,所述底板上还设有一组设定键,所述设定键连接主控器,所述底板的边缘设有led指示灯,所述led指示灯由主控器控制;所述底板的周向边缘还设有若干凸垫。
10.作为优选,所述底板的周向还设有连接固定支架的固定孔,所述固定支架的顶部设有对应数量的连接底板上固定孔的柱体;所述固定支架的底部设有连接所述支撑杆的套筒,所述支撑杆的顶端套接于所述套筒,所述支撑杆的中段为柱体,所述支撑杆的底端部呈尖状并套接于支撑杆的中段;所述支撑杆的上侧壁上还设有声波振动发生器连接主控器的线孔。
11.作为优选,所述支撑杆的杆体由多节圆柱体密封套接而成,所述支撑杆的底端部包括凸柱和尖锥,所述尖锥由若干周向等分凸柱的下端面向下并共轴的直角三角形一体成型;该驱赶装置设置的支撑杆插入室外的土壤当支撑杆受到一定倾斜的力时,土壤对尖锥三角形形成反向支撑力,确保动物驱赶装置不易倒掉。三角形优选由三个或四个共轴(共一条直角边)组成。
12.作为优选,所述霍尔元件位于其中一颗磁铁的正下方,所述霍尔元件连接微控制单元,所述存储模块连接声波喇叭。
13.作为优选,所述存贮模块内存有录制好多种具有警告、惊吓和驱赶功能的警报声。
14.作为优选,所述声波喇叭与led灯组同向;所述led灯组连接所述led灯驱动模块,led灯驱动模块驱动所述led灯组的灯光变频闪烁和/或变色。
15.本发明的有益效果为:
16.1、本发明通过微控制单元控制转向电机带动上壳体旋转实现声波喇叭与磁铁的转动,四个方向的释热红外线传感器用于确定入侵动物方向,微控制单元控制转向电机带动上壳体的旋转以实现声波喇叭和led灯组旋转,霍尔元件与四颗磁铁配合形成角度传感器并配合微控制单元和转向电机实现转向角度的确定,对被锁定的动物方向进行超声波、led强光或警报声进行定向驱赶;能够准确的锁定方向并有针对性的驱赶,通过该发明实现了一个驱赶装置在固定场所的360度全角度大范围的驱赶,大幅提高了驱赶效率并节约了使用成本,由于通常很少有多方向同时出现鼠、鸟、猫、狗等动物的情况,定向锁定并实现声波喇叭和led灯组的方向锁定驱赶无需让电机实时周向来回扫描鼠、鸟、猫、狗等目标动物,延长了驱赶装置中转向电机的使用寿命同时节约了电能的消耗,特别是应用于农田中的驱
赶装置对节约电能非常重要,本发明节能、使用成本低。
17.2、本发明根据需要可采用超声波、警报声、led强光的变频闪烁以及变色单独驱赶,或者超声波与led强光组合、警报声与led强光组合、超声波led强光和警报声轮回的组合驱赶方式,这些驱赶组合方式可以通过所述底板上的一组按键进行设定。多样化的驱赶的方式,使得被驱赶动物无法对驱赶装置进行适应,从而快速逃离。
18.3、根据室内室外驱赶环境的需要选择带有支撑杆的全方位动物驱赶装置对花园、农田等实现地上、地下全维度、全方位的驱赶,地下部分通过支撑杆内装有声波振动发生器对地下穴居的鼠、蛇等动物进行驱赶;当应用场所为室内时,可以取下固定支架和支撑杆,将驱赶装置对室内空间进行地面和空中进行驱赶,使用方便。
19.4、支撑杆的底端部尖锥由若干周向等分套接凸体的下端面向下并共轴的直角三角形一体成型的结构设计使得的支撑杆插入室外的土壤动物驱赶装置不易倒掉,动物驱赶装置的长时间有效驱赶效力。
附图说明
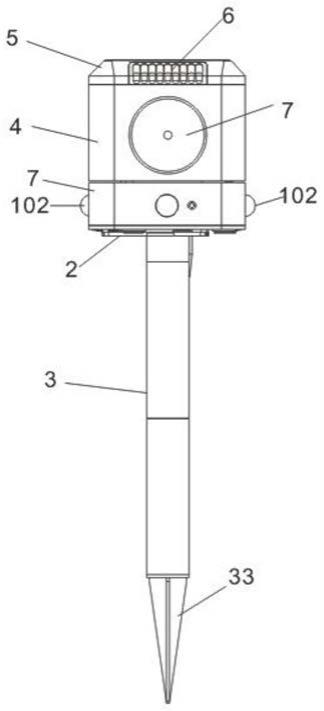
20.图1为本发明的结构示意图;
21.图2为本发明的仰视图;
22.图3为图1的分解示意图一;
23.图4为图1的分解示意图二;
24.图5为图1的分解示意图中含下壳体部分截面的示意图;
25.图6为图1卸掉固定支架和支撑杆后的结构示意图;
26.图7为图6的分解示意图;
27.图8为支撑杆的分解示意图;
28.图9为本发明的原理框图;
29.图10为本发明释热红外线传感器探测区域俯视示意图;
30.图11为本发明的应用于室外实施例的使用场景示意图。
具体实施方式
31.为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
32.请参阅图1
‑
11,一种全方位动物驱赶装置,包括下壳体1、固定支架2、支撑杆3和可旋转的上壳体4;上壳体4的顶部设有上盖5,上盖5上装有太阳能电池板117,上盖5的一侧设有led灯组6;上壳体4与led灯组6相同方向的侧壁上装有声波喇叭7;上壳体4的下端面的四个角分别装有一颗磁铁8,上壳体4的下端面中部设有连接孔41以及与连接孔同圆心设置的齿轮槽42;下壳体1的底部装有底板9,底板9上装有主控器10、电机安装孔11,电机安装孔11内装有转向电机12和电池仓13,可充电电池118装于电池仓13;底板9的中部装有电池仓盖14,底板9上还设有一组设定键20用于选择和设定动物驱赶装置的驱赶模式如超声波驱赶、警报声驱赶、led强光驱赶还是声波与led强光组合驱赶或者地面下声波振动发生器31振动驱赶等,底板9的边缘设有led指示灯15用于显示驱该装置的工作状态,led指示灯15连接于
微控制单元111;底板9的周向边缘设有若干凸垫16。
33.如图1
‑
9所示,下壳体内装有主控器10、给主控器10供电的可充电电池17、以及电连接主控器10的转向电机12,转向电机12通过减速齿轮组18啮合齿轮槽42;下壳体1的顶端一角装有电连接与主控器10的霍尔元件19,下壳体1的顶端中部设有圆柱形凸轴101,凸轴101套接于连接孔41,下壳体1的四个方向的侧壁中部分别装有电连接主控器10的释热红外线传感器102;固定支架2安装于下壳体1的底部;支撑杆3连接于固定支架2,支撑杆3内装有声波振动发生器31;led灯组6和声波喇叭7电连接主控器10。
34.底板9的周向还设有连接固定支架2的固定孔,固定支架2的顶部设有对应数量的连接底板上固定孔的柱体;固定支架2的底部设有连接支撑杆3的套筒21,支撑杆3的顶端套接于套筒21,支撑杆3的中段为柱体,支撑杆3的底端部呈尖状并套接于支撑杆的中段;支撑杆3的侧壁上还设有声波振动发生器31连接主控器10的线孔。
35.如图8、11所示,支撑杆3的杆体由多节圆柱体密封套接而成,支撑杆3的底端部包括凸柱32和尖锥33,尖锥33由若干周向等分凸柱32的下端面向下并共轴的直角三角形一体成型;该驱赶装置设置的支撑杆3插入室外的土壤当支撑杆受到一定倾斜的力时,土壤对尖锥三角形形成方向支撑力,确保动物驱赶装置不易倒掉。
36.如图9所示,主控器10包括微控制单元111,与微控制单元111相连接的超声波模块112、电源管理模块113、无线接收模块114、存储模块115、led灯驱动模块116;太阳能电池板117的输出端连接可充电电池118太阳能电池117板连接电源管理模块113,可充电电池118连接电源管理模块113;外部电源连接可充电电池和电源管理模块113。电源管理模块113用于控制太阳能电池板117给可充电电池118供电;外部电源既可为可充电电池118充电,也能为驱赶装置提供工作电源。
37.如图1
‑
9所示,霍尔元件19位于其中一颗磁铁8的正下方,霍尔元件19连接微控制单元111,存贮模块115内存有录制好的警报声,警报声为:警笛声、鞭炮声、敲击声等;存储模块115连接声波喇叭7;声波喇叭7与led灯组6同向;led灯驱动模块116连接并驱动led灯组6的灯光变频闪烁和/或变色;微控制单元111控制转向电机12带动上壳体旋转实现声波喇叭7、led灯组、磁铁8的转动,霍尔元件19与四颗磁铁8配合形成角度传感器并配合微控制单元11和释热红外线传感器102控制上壳体4的旋转以实现声波喇叭7和led灯组6旋转角度的确定。
38.如图1
‑
11所示,全方位动物驱赶装置,驱赶空间分为两个维度,分别为地面上(包括空中)和地底下。地面上采用声波方式和强光方式进行驱赶,驱赶装置发出的声波(超声波或警报声)使被驱赶对象听了难受(超声波)或害怕(警报声)或者受到强光的惊吓而逃跑;地底下的驱赶对象主要为如鼠类等啮齿动物,驱赶装置则使用声波振动发生器31发出的机械式声波作为驱赶方式,藏身于地底下的啮齿动物因无法忍受机械声波的骚扰或惊吓而逃离;声波振动发生器31采用市场上成熟产品即可。
39.驱赶装置驱赶对象包括老鼠、松鼠、负鼠、花栗鼠、猫、狗、浣熊、鹿、蝙蝠、鸟类、蚊虫等;
40.驱赶模式可通过主控器10设定为地面上声波驱赶、led灯组6强光驱赶、声波与强光组合驱赶、地面下声波振动发生器31发出的机械波驱赶;
41.驱赶时效可通过设定键20或遥控器选择设定为:
42.一、释热红外线传感器102探测到动物侵入后启动所选择的驱赶模式,直至入侵动物被驱离;
43.二、开机后所选择的驱赶模式一直工作;
44.三、所选择的驱赶模式周期性工作,即工作一个周期后停顿一段时间后再次工作一个周期。
45.释热红外线传感器102可通过设定键20或遥控器选择由微控制单元111设定释热红外线传感器102的红外探测模式:
46.a、定点一个方向实时侦探;
47.b、四个方向周期性侦探;
48.c、四方向实时侦探。
49.全方位动物驱赶装置可通过设定键20或遥控器以设定主动驱赶模式或被动驱赶模式。
50.在主动模式时,驱赶装置会一直处于驱赶状态中,在此模式中,驱赶装置还可设定为定向驱赶,声波喇叭7和led灯组6固定朝某个方向发出声波(超声波或警报声)和强光进行驱赶,或者360度扫描驱赶声波喇叭和led灯组自动进行360度来回旋转发出声波和强光进行驱赶;
51.在被动模式时,当某个释热红外线传感器102被触发之后,驱赶装置会将声波喇叭7和led灯组6转向该方向发出声波(超声波或警报声)和强光进行驱赶,直到触发被消除才停止驱赶转向电机12回复到初始位置,并再次进入探测状态。
52.如图10
‑
11所示:当有动物闯入某个探测区域,该方向的释热红外线传感器102被触发,驱赶装置自动将声波喇叭7和led灯组6转到该探测区域方向发出声波和/或强光进行驱赶;当有动物闯入两个方向及以上的探测区域时,对应位置的释热红外线传感器102被触发,声波喇叭7和led灯组6将在这几个探测区域方向来回旋转并发出声波和/或强光进行驱赶。只要有某种动物在探测区域范围内活动,驱赶装置将声波喇叭和强光灯转到相应的区域并启动声波和/或强光进行驱赶。
53.如图8所示,当无需地下驱赶时,只需将固定支架2、支撑杆3拆卸下来,并放置于地面即可。
54.通常情况下建议采用被动模式,由于很少同时从多个方向一起出现入侵动物,并将声波喇叭7和led灯组6对准动物最常出现的方向,释热红外线传感器102探测到动物侵入后启动所选择的驱赶模式,霍尔元件19采集到的角度信息发送微控制单元111,微控制单元控制转向电机12带动上壳体旋转将声波喇叭7和led灯组6对准动物方向,有针对性的定向驱赶直至入侵动物被驱离;此方式也是最节能省电、能延长转向电机12使用寿命的方式。
55.全方位动物驱赶装置工原理如图9所示,四个释热红外线传感器102分别为四个方向探测,当某个释热红外线传感器102被触发之后,其将探测捕捉到的信号发送给主控器10的微控制单元111,微控制单元111控制转向电机12带动上壳体4的旋转以实现声波喇叭7和led灯组6旋转,霍尔元件19安装在下壳体1的顶端一角,在上壳体4边缘的四个角对应下壳体霍尔元件19的位置分别安装有四个磁铁,当上壳体4旋转时磁铁8也跟着旋转,上壳体4旋转中当磁铁8经过霍尔元件19上方时,磁铁8上的磁力线触发霍尔元件19,霍尔元件19再给微控制单元111提供触发信号,此过程组成转向控制;霍尔元件19与四颗磁铁8配合形成角
度传感器并配合微控制单元111和转向电机12实现转向角度的确定,并进入驱赶状态;主控器10通过微控制单元111连接控制超声波模块112和存储模块115为声波喇叭7提供各钟声波信号(超声波或警报声),微控制单元111通过led灯驱动模块116提供发光信号,可以控制led灯组6以多种闪烁模式和/或变换多种发光颜色;微控制单元111控制声波振动发生器31发出振动波。
56.以上实施例仅表达了本发明的实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1