一种割草机的制作方法
1.本实用新型涉及一种割草机。
背景技术:
2.割草机为通用化的使用频次高的生产工具,普遍用于园林养护工作中。割草机作为商品在流通环节面临的突出问题是包装体积过大,使得标准装箱条件下能够运输的数量不多。该类问题主要表现在手推式割草机以及自走式割草机中,现有技术中该类割草机的扶手为双推杆结构,例如中国专利公开号为cn111788939a、公开日为2020年10月20日、专利名称为“用于冷却割草机部件的设备和方法”中记载了割草机上设有手柄,手柄包括右延伸部、左延伸部和连接至每个延伸部并从每个延伸部延伸的u形部分,该手柄即为前述的双推杆结构的扶手。为达到安全标准,扶手结构与机体之间最佳的连接方式是不可拆卸的固定连接,但这会使得扶手占用的空间影响包装所需的空间大小,当用木箱包装割草机时会受限于扶手所占空间而使得木箱体积很大,这给产品在市场流通环节带来不便。另外,现有技术中此类割草机扶手的高度是固定的,这对于不同身高的操作者而言存在使用缺陷,毕竟身高各异的个体对于最佳手持高度的要求是不一样的。
3.综上所述,现有技术中手推式割草机以及自走式割草机存在装箱体积大以及扶手高度不可调的不足。
技术实现要素:
4.本实用新型要解决的技术问题是如何实现割草机的扶手可拆卸,由此得到一种可节约装箱空间的割草机。
5.为解决上述技术问题,本实用新型采用如下技术方案:该割草机包括主机和扶手,所述扶手以摆动方式活动安装在主机的壳体上,所述扶手包括手持单元和连接单元,所述手持单元上设有手柄和连接柱,所述连接柱呈笔直的柱状结构,所述手柄位于连接柱的一端并且手柄与连接柱固定连接,所述连接单元包括连接叉、调节自锁组件,所述连接叉整体弯曲呈n形,所述调节自锁组件包括转轴、复位弹簧、调节齿轮、按钮,所述转轴穿过壳体而活动安装在壳体上,所述转轴的两端都位于壳体外部,所述连接叉的一端与转轴的一端固定连接,所述连接叉的另一端与转轴的另一端固定连接,所述复位弹簧和调节齿轮都活动安装在转轴上且都位于壳体外部,所述连接叉的另一端的内部设有对应调节齿轮的内齿圈ⅰ,所述按钮活动安装在连接叉设有内齿圈ⅰ的该端,所述按钮上设有推杆,所述壳体上设有对应调节齿轮的内齿圈ⅱ,所述复位弹簧位于内齿圈ⅱ内,所述调节齿轮的厚度大于内齿圈ⅰ的深度,所述调节齿轮的厚度小于内齿圈ⅱ的深度,所述内齿圈ⅰ正对内齿圈ⅱ并且内齿圈ⅰ与内齿圈ⅱ连通,所述调节齿轮的运动范围位于在内齿圈ⅰ和内齿圈ⅱ内,所述推杆伸入到内齿圈ⅰ且与调节齿轮活动连接,所述壳体通过调节齿轮与连接叉同步运动,所述连接叉的中间部位设有连接凸起,所述连接凸起外部设有螺纹,所述连接柱的另一端设有凸缘,所述连接柱上安装有旋钮套,所述连接柱通过连接凸起拧入旋钮套内而与连接叉活动
连接。
6.本技术方案中扶手的连接柱为笔直的柱状结构,连接柱的结构可以采用金属管材实现,连接柱的数量仅为一根,因而扶手结构得到优化。扶手为可拆卸式结构,手持单元和连接单元之间通过旋钮套结构连接,拧动旋钮套即可组装扶手或者拆开扶手,拆装极其简单。在本技术方案中得益于连接单元的精巧结构,获得了可以固定连接叉倾斜角度的功能。调节齿轮同时嵌入在连接叉和壳体上时,连接叉相对于壳体不能摆动、进而保持连接叉相对于壳体固定的姿态;当调节齿轮被全部推进至壳体后,连接叉可相对于壳体做摆动,进而获得连接叉倾斜角度的调整效果。手持单元的高度在连接叉调节角度后得到改变,最终实现调节扶手高度的目的。
7.扶手摆动范围受限,这样可以有效防止误操作带来的以外伤害以及对割草机本身的损伤。为此,所述壳体外部设有两个对称分布的限位槽,所述连接叉的端部嵌入在限位槽内,所述壳体在限位槽处设有第一限位面和第二限位面,所述第一限位面与第二限位面相交,所述第一限位面与水平面的夹角小于第二限位面与水平面的夹角,所述扶手在壳体上的摆动角度为十二度到一百一十度。
8.扶手摆动范围被物理受限后,还可以通过供电控制来降低安全问题发生的概率。为此,本技术方案中设置了可响应扶手处于极限位置状况的开关功能。连接单元还包括限位开关,所述连接叉的一端的外部设有限位凸起,所述限位开关位于壳体内部,所述限位凸起伸入到壳体内部,所述限位凸起与限位开关活动连接,所述限位凸起的朝向与连接单元连接手持单元的该端的延伸方向的夹角大于九十八度。
9.本实用新型采用上述技术方案:割草机的扶手结构优化获得可拆卸式功能,主要部件拆分后所需包装空间大大缩小,且通过该拆卸功能还使得扶手具有高度可调功能,能够满足不同身高的操作人员的使用要求,因而,割草机在商品流通环节具有包装体积小、搬运存储便利的特点,在使用阶段具有操作便利的特点。
附图说明
10.下面结合附图和具体实施方式对本实用新型作进一步具体说明。
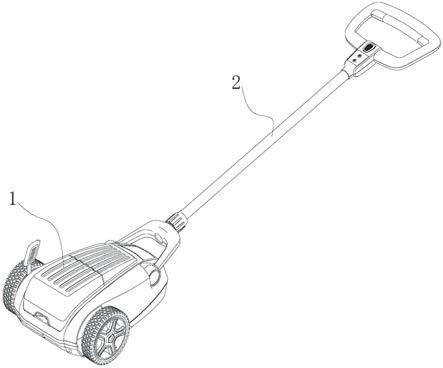
11.图1为本实用新型一种割草机在扶手处于相对于水平面夹角为十二度状态下的结构示意图;
12.图2为本实用新型一种割草机的扶手的结构示意图;
13.图3为本实用新型一种割草机的扶手的手持单元的结构示意图;
14.图4为本实用新型一种割草机的扶手的连接单元的结构示意图;
15.图5为本实用新型一种割草机的壳体的结构示意图;
16.图6为本实用新型一种割草机在扶手处于相对于水平面夹角为一百一十度状态下的结构示意图。
具体实施方式
17.如图1、2、3、4、5、6所示,割草机设有主机1和扶手2,主机1用于在行走于地面时割草,扶手2用于控制主机1行走方向以及提供一定的行走所需的动力。该实施例中,扶手2活动安装在主机1的壳体3上,扶手2相对于水平面的摆动范围十二度到一百一十度。
18.扶手2由两部分组成,分别是手持单元和连接单元,它们两个单元可通过组合方式连接在一起、此后亦可拆分。手持单元包括手柄4和连接柱5。如图2、3所示,连接柱5为笔直的柱状结构,可采用金属管材制得,例如结构强度高、材质轻盈的铝管。手柄4为环状结构,它位于连接柱5的一端,手柄4与连接柱5支架固定连接。连接后,手柄4的中心线与连接柱5的中心线相互垂直、两者都处于同一平面内。
19.如图3、4所示,连接单元包括连接叉6、调节自锁组件、限位开关11。连接叉6整体弯曲呈n形。
20.调节自锁组件包括转轴7、复位弹簧8、调节齿轮9、按钮10。转轴7穿过壳体3而活动安装在壳体3上,转轴7可以在壳体3上自由转动。转轴7的中间部位位于壳体3内部、转轴7的两端位于壳体3外部。连接叉6的一端与转轴7的一端固定连接,连接叉6的另一端与转轴7的另一端固定连接。连接叉6的一端的外部设有限位凸起12,限位开关11安装在壳体3内部并与割草机内部的供电电路串联,限位凸起12伸入到壳体3内部,当连接叉6在壳体3上摆动时限位凸起12会与限位开关11的触发部位相互挤推进而获得活动连接的位置关系、并由此触发限位开关11。
21.复位弹簧8和调节齿轮9都活动安装在转轴7上且都位于壳体3外部。连接叉6的另一端的内部设有对应调节齿轮9的内齿圈ⅰ13。按钮10活动安装在连接叉6设有内齿圈ⅰ13的该端,按钮10的一侧设有推杆14以及倒勾15结构,倒勾15用于卡入连接叉6上进而使得按钮10被限制在连接叉6上,所以按钮10可以在连接叉6上运动。
22.如图5所示,壳体3上设有对应调节齿轮9的内齿圈ⅱ16,复位弹簧8位于内齿圈ⅱ16内。调节齿轮9的厚度大于内齿圈ⅰ13的深度,调节齿轮9的厚度小于内齿圈ⅱ16的深度,安装后,内齿圈ⅰ13正对内齿圈ⅱ16并且内齿圈ⅰ13与内齿圈ⅱ16连通。初始状态下复位弹簧8始终将调解齿轮推向内齿圈ⅰ13内即推进连接叉6的端部,调节齿轮9的运动范围位于在内齿圈ⅰ13和内齿圈ⅱ16内;由于调节齿轮9的厚度大于内齿圈ⅰ13的深度,调节齿轮9只有部分嵌入在内齿圈ⅰ13、其它部位位于内齿圈ⅱ16内即在壳体3内,这样会使连接叉6、调节齿轮9和壳体3不能相互独立运动、三者只能做同步运动且三者的空间姿态都同步变化。按钮10的推杆14伸入在内齿圈ⅰ13中,推杆14朝向调节齿轮9所在位置,按动按钮10后推杆14即可与调节齿轮9建立活动连接关系、按钮10推动调节齿轮9朝着内齿圈ⅱ16所在位置运动、甚至可以将调节齿轮9推出内齿圈ⅰ13,进而调节齿轮9可以脱离连接叉6;在此状态下,调节齿轮9和壳体3仍然不能相互独立运动,但连接叉6可以做相对于壳体3的摆动运动,扳动连接叉6后改变连接叉6的空间姿态;当松开按钮10后复位弹簧8将调节齿轮9又推进到内齿圈ⅰ13内,使得连接叉6、调节齿轮9和壳体3又不能相互独立运动,这样调节空间姿态后的连接叉6就可以在壳体3上保持新姿态。
23.壳体3外部设有两个对称分布的限位槽17,连接叉6的端部嵌入在限位槽17内。壳体3在限位槽17处设有第一限位面18和第二限位面19,第一限位面18与第二限位面19相交,第一限位面18与水平面的夹角小于第二限位面19与水平面的夹角,第一限位面18和第二限位面19都会阻挡连接叉6的摆动运动,使得第一限位面18和第二限位面19有效限制扶手2的摆动角度,确保扶手2在壳体3上的摆动角度为十二度到一百一十度,如图1、6所示。
24.如图4所示,连接叉6的中间部位设有连接凸起20,连接凸起20外部设有螺纹。连接柱5的另一端设有凸缘,连接柱5上安装有旋钮套21,旋钮套21一端的通孔直径要小于凸缘
的外径、旋钮套21其它部位的通孔直径都要大于凸缘的外径,所以旋钮套21安装在连接柱5上后旋钮套21被限制在了连接柱5上,旋钮套21只能在连接柱5上滑动、但不能脱离连接柱5。组装时,连接柱5通过连接凸起20拧入旋钮套21内而与连接叉6活动连接。扶手2通过旋钮套21处的连接结构获得可拆的特点。当扶手2组装完整后,限位凸起12的朝向与连接单元连接手持单元的该端的延伸方向即连接叉6的连接凸起20的延伸方向的夹角为一百一十度。
25.装箱时,可以通过拧动旋钮套21进行扶手2拆装操作,手持单元与连接单元组合在一起、或者手持单元与连接单元分开。连接单元上连接叉6位于壳体3外部,连接叉6较为贴服与壳体3表面,所以使得主机1外形较为紧凑,包装时占用的空间较小;拆下的手持单元同样外形紧凑,包装时占用空间较小。使用时,将手持单元组装到连接单元上,获得完整的扶手2后就可以使用割草机。若要调整扶手2高度的,先按动按钮10,促使连接叉6与壳体3的连接关系由同步运动关系变为各自能够独立运动的关系,调解齿轮整个进入内齿圈ⅱ16中,扳动扶手2到所需的高度后松开按钮10,调解齿轮再次嵌入到内齿圈ⅰ13中,此后扶手2的新姿态得到保持。扶手2摆动范围为十二度到一百一十度,当扶手2处于与水平面的夹角为十二度时限位凸起12会与限位开关11的触发部位相互挤推,限位开关11被触发,限位开关11内部处于断开状态,这样割草机就无法被启动,从而保证扶手2在此高度下会视为存在危险操作。而当扶手2脱离十二度的倾斜角度后限位开关11内部便可以恢复连通状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1